基于位移矩阵法门座起重机模型变幅机构的设计
2018-07-05,,,
,, ,
(1.东北大学秦皇岛分校 控制工程学院,河北 秦皇岛 066000; 2.秦皇岛港务集团第七港务公司,河北 秦皇岛 066000)
四连杆组合臂架式门座起重机是装卸船舶的重要吊装设备,广泛应用于港口、大型船舶修造等行业.其变幅机构具有臂架刚性好、工作空间大、起升索具磨损小等优点,是目前门座起重机生产企业普遍采用的变幅方案.门座起重机等比例缩小模型通常由起升机构、变幅机构、回转机构、行走机构、吊具装置、电气设备及其他辅助设备组成[1],在教学上可以展示其机构的机械原理、港口机械结构等方面知识.通过电控系统的操作,还可以模拟作业过程供学员实训演练.
变幅机构是门座起重机模型的重要执行装置之一,其主体部分如图1所示,主要由基座、臂架、象鼻梁、拉杆组成双摇杆型四杆机构.作业时为保障货物装卸的稳定性及降低驱动功率的要求,象鼻梁悬挂点P在幅度范围内以接近水平轨迹运动,且运行过程中水平速度的变化及臂架不平衡力矩也应满足一定要求[2].对于变幅机构的设计传统方法一般采用作图法,在设计过程中需反复试凑参数,工作效率低下且精度较低.位移矩阵法是以各运动副位置坐标为参数,以杆长或方位角不变为约束建立方程对机构尺寸进行综合的一种方法.华大年等[3-5]对位移矩阵法做了相应的介绍,由于其初始条件一般给定几个具体位置,因此,位移矩阵法同时也是一种准点法.但位移矩阵法也有其局限性,因其计算只是针对位置关系的求解,对于机构受力情况不能进行分析.王焕[6]最早将该方法应用于门座起重机变幅机构的设计,重点阐述了准点数与方程组中自由变量个数的关系,但如何合理地配置准点及初始条件约束并未清晰给出.门座起重机模型的变幅机构构件质量较小,因此,采用位移矩阵法设计时可不考虑受力的影响.随着计算机辅助设计软件的发展,结合位移矩阵法在变幅机构设计的初始阶段可准确、高效地计算设计结果,并对其性能进行分析预测.
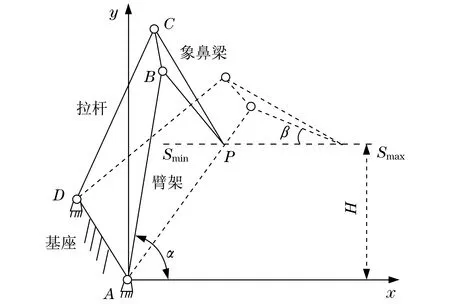
图1 四连杆组合臂架机构简图Fig.1 Kinematic mechanism diagram of gantry crane’s four-bar linkage arm
1 刚体位移矩阵法原理
如图2所示,已知刚体的位置由一直线AB表示,在坐标系xOy中,从初始位置移动至任意位置j处.若给定AB初始位置坐标A1(xA1,yA1),B1(xB1,yB1),Aj(xAj,yAj)及直线AjBj相对于初始位置的转角θ,根据几何关系可得出新位置下坐标B(xBj,yBj)[7-8]:
(1)
变换成矩阵形式
(2)
若令
(3)
则D1j即为刚体AB的位移变换矩阵,且当d13j=d23j=0时刚体绕坐标原点转动,当θ等于0时刚体在坐标面内作平动.

图2 刚体的平面移动Fig.2 Plane movement of rigid body
2 变幅机构的设计
如图1所示,A,D为基座上四杆机构固定铰点,象鼻梁CBP的悬挂点P要求在幅度Smax~Smin范围内接近直线运动,AD两点坐标值、高度H一般由起重机总体布置要求给定[9],臂架AB与水平线的夹角α和象鼻梁悬挂杆BP与水平线的夹角β,可根据港口起重机设计规范查得相应的工程许用参数.因此,该变幅机构综合问题即为通过已知幅度上水平准点及角度约束求得四杆机构BC两点坐标值的问题.
2.1 沿准点变幅的位移矩阵方程
设最小幅度时象鼻梁悬挂点处于P1位置,当变幅作业时象鼻梁从初始位置运行至任意位置j时(j=2,3,…,j),象鼻梁相对臂架的转角逆时针为正,则有位移矩阵
(4)
由于象鼻梁CBP是一个刚体构件,则两点新位置Bj,Cj坐标与初始位置关系有
在运动过程中刚性连杆的长度不变,则
为求得象鼻梁位移矩阵需给定初始转角β1,由几何关系可得
(9)
由文献[6]可知,已知j个准点可得到2(j-1)+1个关系式.其中,已知量为xP1,yP1,xPj,yPj,xA,yA,xD,yD,β1,未知量为xB1,yB1,xC1,yC1,βj.而由文献[2]知解析法设计四连杆门座起重机变幅机构通常选定最小、最大幅度以及之间共3个同水平准点.这样可得到两个位移矩阵5个关系式,方程组中有6个待定未知量,因此,还需根据港口机械设计规范指定1个约束条件方程.一般为保证良好的力学特性及合理的工作空间,最大、最小幅度时对于角度β3,α1,α3定的要求[9].
2.2 约束方案1

(10)
综合式(6)可得
(11)
根据BC杆长不变,则
(12)
综合式(4)~式(12),根据最大、最小幅度时两个位置可直接求得xC1,yC1,同给定β3,α3或α3,α1一样,方法虽简单、高效、但只控制P点轨迹满足两点水平,若控制中间水平点出现的位置需要对给定值α1,β1及高度H试凑以满足工程需求.
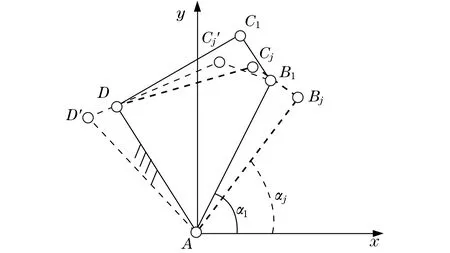
图3 j位置下的刚化反转Fig.3 Stiffening and reversal of the mechanism in j position
2.3 约束方案2
若选定臂架AB与水平线的夹角α3为定值,能够保证最大幅度时臂架下有足够合理的工作空间,且可根据给定的3个准点配置P点轨迹.第3个水平准点P3出现的位置宜根据下式选定[9]:
(13)
根据几何关系有
(14)
综合式(4)~式(9)、式(13)和式(14),可知若给定象鼻梁悬挂点P1,P2,P3的3准点坐标及β1,α3角度约束条件,变幅机构的设计可得解.
2.4 计算实例
以10 t的门座起重机模型设计为例,原型机要求最小、最大工作幅度分别为Smin=6.5 m,Smax=23.5 m;轨上工作高度H=13.3 m,已知A(0,0),D(-4,7),为满足点P在幅值范围内运动轨迹近似一条直线,同时减少结构误差,选择约束方案2以控制轨迹上3点水平.并根据经验式(13)配置中间准点.
根据港口起重机设计规范可知,为保证机构具有良好的力学特性及合理的工作空间,α,β的经验范围分别是α3∈(40°~45°),β1∈(78°~85°)[10],选取设计参数如表1所示.
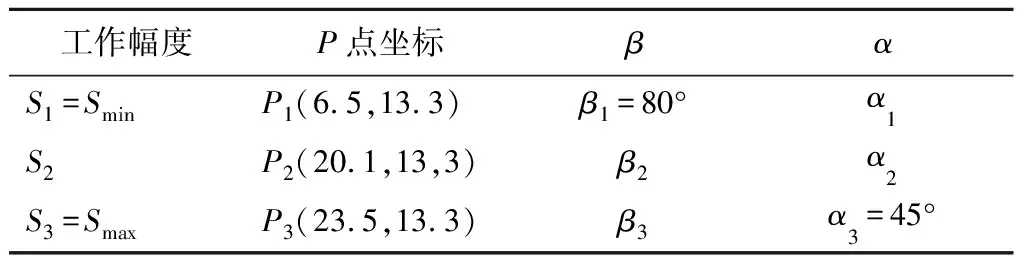
表1 选定设计参数Tab.1 The specified parameters for the design
把已知参数代方程组化简后可解得B1(5.067, 21.425),C1(5.112, 24.372).
2.5 算例机构的水平性能
门座起重机变幅机构的水平性能是指象鼻梁端点在变幅过程中尽可能沿着水平轨迹运动,由吊物引起的不平衡力矩尽可能小,变幅过程中速度变化平缓,减小由吊物晃动冲击[11-13].根据所得各铰点坐标在ADAMS软件中建立虚拟样机模型,设置臂架恒定转速5 m/min运行仿真提取变幅过程中P点运动轨迹.如图4所示,由于四杆机构的特点悬挂点P点在幅度范围的轨迹呈连续起伏状态,且在幅度S1S2S3处位于同一水平位置,峰谷最大落差值为0.25 m,满足经验设计规范对水平性能的要求(≤0.03(Smax-Smin))[10].P点水平速度变化曲线如图5所示,当臂架匀速摆动时,在最小幅值时水平方向的速度最大,在最大幅值时最小,符合经验运动规律.其中,vmax/vmin=2.75满足实机的速比许用范围[10](<2.9),但水平落差和速度变化若要满足尽可能小则需要进一步优化计算[14-15].
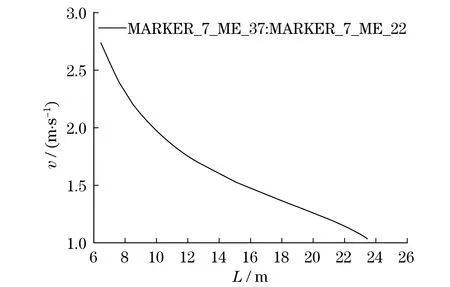
图5 象鼻梁悬挂点P变幅过程中水平运动速度Fig.5 The speed variation of P in the process of luffing
3 结语
本文采用位移矩阵法设计四连杆组合臂架式起重机模型的变幅机构,详细阐述了准点的配置方法,并分别对最大、最小幅度时臂架和象鼻梁摆角约束进行了讨论.结果表明:采用该方法设计出的变幅模型可准确地按既定准点配置象鼻梁悬挂点的运行轨迹,基本能够反映出原型机的工作状态,满足模型演示和实训的教学需求.进一步的设计,在考虑结构受力状态下,可按金属结构变形量修正配置准点使之达到更精确的水平位移.但若要保证在水平方向近似匀速运行,则需对机构参数进行多目标优化设计.整个设计过程同时也反映出约束条件取值依赖经验参数、方程求解繁琐等问题.
参考文献:
[1] 陆国贤,倪庆兴,张荣康.门座起重机设计[M].北京:人民交通出版社,1985:36-127.
LU G X,NI Q X,ZHANG R K.Design of gantry crane[M].Beijing:China Communication Press,1985:36-127.
[2] 郭燕,彦彬.港口起重机械[M].武汉:武汉理工大学出版社,2013:163-170.
GUO Y,YAN B.Port hoisting machinery[M].Wuhan:Wuhan University of Technology Press,2013:163-170.
[3] 华大年,华志宏.连杆机构设计与应用创新[M].北京:机械工业出版社,2008:127-129.
HUA D N,HUA Z H.Design and application innovation of connecting rod mechanism[M].Beijing:China Machine Press,2008:127-129.
[4] 孔益元,廖汉元.机构综合与优化[M].北京:机械工业出版社,2013:102-117.
KONG Y Y,LIAO H Y.Mechanism synthesis and optimum[M].Beijing:China Machine Press,2013:102-117.
[5] 张春林,赵自强.高等机构学[M].北京:机械工业出版社,2015:94-101.
ZHANG C L,ZHAO Z Q.Advanced mechanism[M].Beijing:China Machine Press,2015:94-101.
[6] 王焕.位移矩阵法的门机四连杆组合臂架的综合与分析[J].武汉水运工程学院学报,1984(4):25-32.
WANG H.The synthesis and analysis of the four link gantry crane by the displacement matrix method[J].Journal of Wuhan of Transport Engineering Institute,1984(4):25-32.
[7] 田忠辉,王淑芬.基于位移矩阵的平面四杆机构运动综合[J].大连大学学报,2010(6):57-60.
TIAN Z H,WANG S F.Motion comprehension of four-rod mechanism based the displacement matrix method[J].Journal of Dalian University,2010(6):57-60.
[8] TSAI Y C,HUANG G M,LIN C F,et al.A study of the centrodes of human knee joints using differential method and rigid-body displacement matrix method[C]// The Eighteenth China International Symposium of Mechanism and Machine Science.2012:1-4.
[9] 起重机设计规范:GB 38112—83[S].北京:北京起重运输机构研究所,1983:5-45.
Design rules for cranes:GB 38112—83[S].Beijing:Beijing Materials Handling Research Institute,1983:5-45.
[10] 上海港机重工有限公司.港口起重机设计规范[M].北京:人民交通出版社,2007:742-744.
Shanghai Heavy Industry Co.,Ltd.Designrules for port crane[M].Beijing:China Communication Press,2007:742-744.
[11] 李明星.基于遗传算法的门座起重机变幅系统优化设计[D].武汉:武汉理工大学,2006.
LI M X.Optimization design for portal crane based on genetic algorithms[D].Wuhan:Wuhan University of Technology,2006.
[12] 王旭旺.刚性四连杆门座起重机变幅系统优化设计研究[D].武汉:武汉理工大学,2014.
WANG X W.The study of optimization design for rigidity four-linkage portal crane luffing system[D].Wuhan:Wuhan University of Technology,2014.
[13] 郑晓亮,陈定方.Matlab的门座起重机臂架系统优化与仿真[J].湖北工业大学学报,2012(8):45-47.
ZHENG X L,CHEN D F.Optimization and simulation of crane arm frame system based on Matlab[J].Journal of Hubei University of Technology,2012(8):45-47.
[14] 赵琼,童水光,钟崴,等.基于GA-FEA的门座起重机变幅机构优化设计[J].浙江大学学报(工学版),2015(5):880-886.
ZHAO Q,TONG S G,ZHONG W,et al.Optimal design of luffing mechanism of portal crane based on genetic algorithm and finite element analysis[J].Journal of Zhejiang University (Engineering Science),2015(5):880-886.
[15] 徐雪松.基于混合神经网络的门座起重机变幅机构参数优化设计[J].机械工程学报,2005(4):220-224.
XU X S.Hybrid neural networks based portal crane luffing system optimal design[J].Chinese Journal of Mechanical Engineering,2005(4):220-224.
