基于序关系分析法的车辆主动悬架控制器仿真研究
2018-07-05,,,,
, ,,,
(河南科技大学 机电工程学院,河南 洛阳 471003)
悬架系统是车辆组成最重要的总成之一,它能够缓冲由于地面凹凸不平对车辆造成的冲击力,对驾乘舒适度、车辆的操控和安全性等有着重大的影响.传统被动悬架系统的刚度和阻尼不可调而自身变化范围又较小,难以适应不同的路况.而根据不同路面情况并结合当前车辆运动状况等因素,对悬架刚度和阻尼进行自动调整,从而使车辆达到最优行驶状态,称之为主动悬架系统[1].在利用线性二次型高斯(Linear Quadratic Gaussian,LQG)最优控制器对主动悬架设计时,加权系数的确定是最重要的.文献[2]通过构造判断矩阵来确定各性能指标的加权系数,并对原悬架控制器进行了优化,所设计的控制器在一定程度上改善了悬架性能.文献[3]基于遗传算法,引进误差修正因子,并结合模糊控制策略构建了确定加权系数的最优控制规则,较大程度地改善了性能指标,优化后系统的稳定性得到了进一步提升.文献[4]提出基于局部精英策略人工蜂群算法确定加权系数的方法,改善了整车行驶的平顺性.
本研究以Matlab/Simulink为仿真平台,以单轮车辆主被动悬架模型为目标,选择系统输入信号模型,结合序关系分析(The Order Relation Analysis,G1)法确定各性能指标的权重值,运用车辆动力学和最优线性控制理论完成LQG控制器设计.根据仿真结果对所设计的主动悬架控制器性能进行分析,以论证设计方法是否正确及有效.
1 模型建立
1.1 主被动悬架模型
分别建立单轮车辆主被动悬架模型,如图1所示.

图1 单轮车辆主被动悬架模型Fig.1 Active and passive suspension model of single wheel vehicle
1.2 路面激励模型
根据最优线性控制理论的要求,这里选择服从高斯分布的滤波白噪声作为系统输入[5]:
(1)
式中:xg为路面垂直位移;G0为路面不平度系数;U0车辆速度;w和f0为数学期望为零的高斯白噪声和下截止频率.
2 LQG控制器设计
2.1 系统状态方程
由动力学知识可知,被动悬架系统车辆模型状态空间方程为
(2)
主动悬架系统的系统运动方程为
由式(1)、式(3)和式(4)联立可得主动悬架车辆模型系统的状态空间方程,并改写成如下矩阵的形式:
(5)

2.2 控制器设计
在车辆悬架设计中,轮胎动位移反映了轮胎与地面相接触的能力,车身加速度反映了乘客和驾驶员的乘坐舒适度,而悬架动行程则代表了车辆行驶过程的平稳性,车身加速度的大小与作动器输出力的大小成正比例关系.
主动悬架的LQG优化指标函数J定义为轮胎动位移、车身加速度和悬架动行程三者的加权平方和的积分值:
(6)
式中:q1,q2,ρ分别为各性能指标的加权系数.为研究方便,在这里取车身垂向加速度的加权系数ρ=1[6].
为方便计算,将式(6)改写成矩阵的形式:
(7)
式中:X为状态变量;Q为状态变量加权矩阵;R为控制变量加权矩阵;N为交叉项权重矩阵.
当车辆参数和加权系数确定后,最优控制反馈增益矩阵K即可由黎卡提(Riccati)方程求出[7-8]:
AK+KAT+Q-KBR-1BTK+FWFT=0
(8)
然后按照任意时刻的反馈状态变量X(t),按照式(9)就可以得出任意时刻t的最优主动控制力Ua(t),即
(9)
2.3 加权系数的确定
2.3.1同尺度量化比例系数

(10)
2.3.2主观加权比例系数
G1法通过对所有指标因素按照相对于评价准则重要程度的不同进行排序,在进行两两比较的同时,赋予不同的权重值.与模糊综合评价法和层析分析法相比,无需构造判断矩阵,也不需要进行一致性检验,有着计算量小、结果直观的优点[10-11].
(1) 确定序关系.
G1法定义:相对于用户的主观评价准则,若指标xi的重要程度大于等于指标xj,则有xi≻xj.


(2) 给出指标间相对重要程度的判断.
对于给定关于主观评价准则,指标xk-1与xk的重要性程度之比ωk-1/ωk的判断定义为ωk-1/ωk=rk,其中,k=m,m-1,m-2,…,3,2.rk的赋值如表1所示.

表1 rk赋值表Tab.1 Assignment list of rk
同时规定,rk之间的必须满足rk-1>1/rk.
(3) 权重系数的计算.
对于排序好的评价指标集可按式(11)和式(12)计算权重系数:
(4) 主观加权比例系数.

(13)
3 模型仿真与分析
3.1 车辆模型参数
相关车辆模型参数如表2所示.
将表2中的车辆参数带入式(2)、式(5)和式(7),得到矩阵A2,B2,Q,R,N,调用最优线性二次控制器设计函数[K,S,E]=LQR[A2,B2,Q,R,N],便可完成最优主动控制器的设计.求得的最优反馈增益矩阵K结果为

表2 车辆模型相关参数Tab.2 Relevant parameters of vehicle model
3.2 Simulink车辆模型的建立
根据前述设计方案,在Simulink环境中对主被动悬架模型进行仿真[12-13],如图2所示.仿真计算以滤波白噪声作为路面输入模型,白噪声的生成可以调用Matlab函数WGN(M,N,P),产生一个M行N列的高斯白噪声矩阵,噪声强度由P值来决定(dB).在该仿真当中取M=10 001,N=1,P=20,即共取10 001个采样点,采样时间设定为0.005 s,当车速为20 m/s的时候,相当于仿真路面长度为1 000 m.
3.3 结果和分析
仿真结果分别如图3和图4所示.从仿真得到的结果可以做如下结论:
(1) 计算得到主被动悬架的性能指标均方根值,如表3所示.
(2) 由图4可以得出,主动控制力的范围在-2 422.167~1 947.846 N,经计算得出主动控制力的均方根值为523.565 N,这表示,主动力的控制力处于所要求的范围(±3 000 N)之内.


图2 Simulink环境下的系统仿真框图Fig.2 System simulation block diagram in Simulink environment
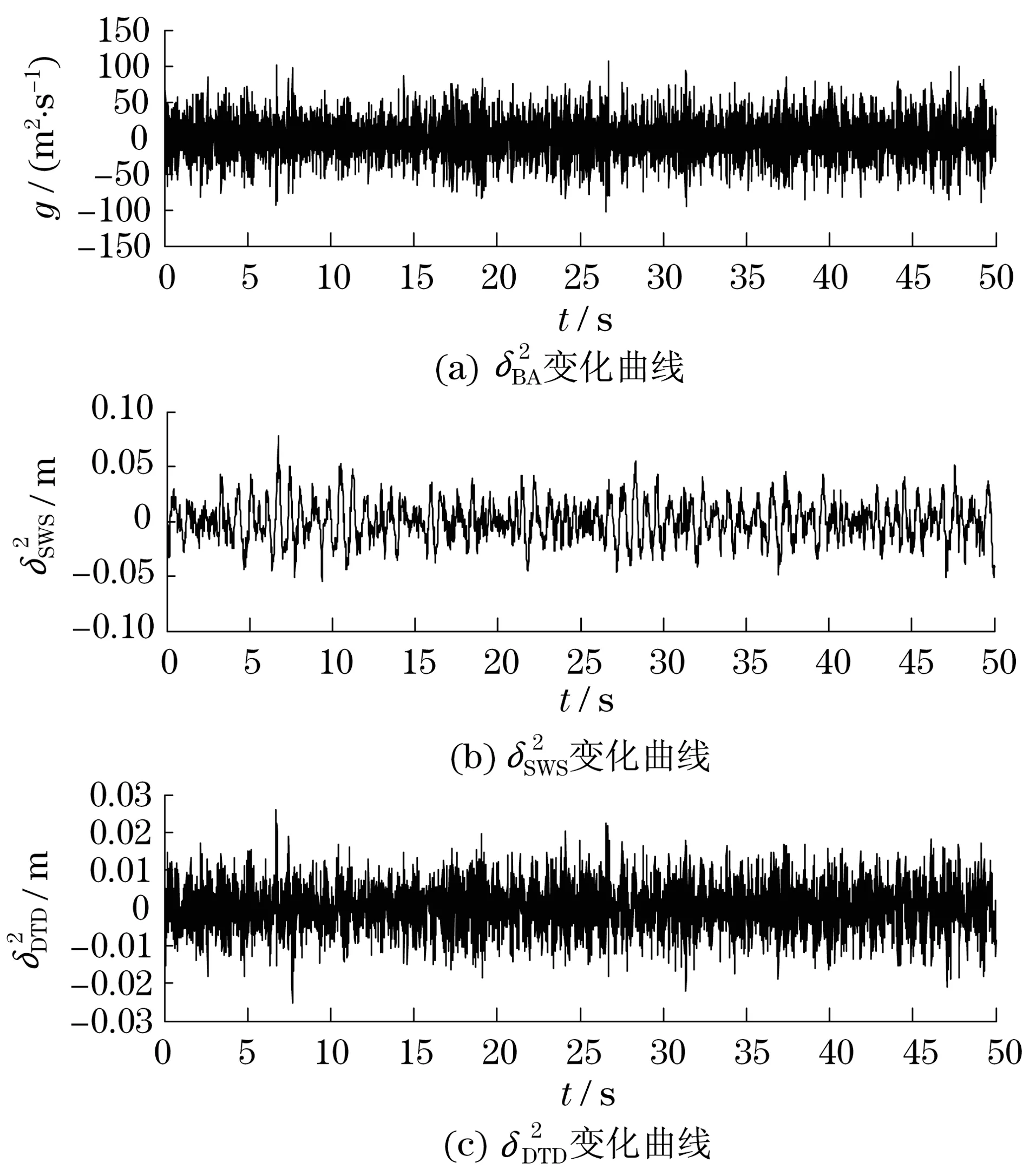
图3 被动悬架系统仿真结果Fig.3 Passive suspension system simulation results

图4 主动悬架系统仿真结果Fig.4 Active suspension system simulation results
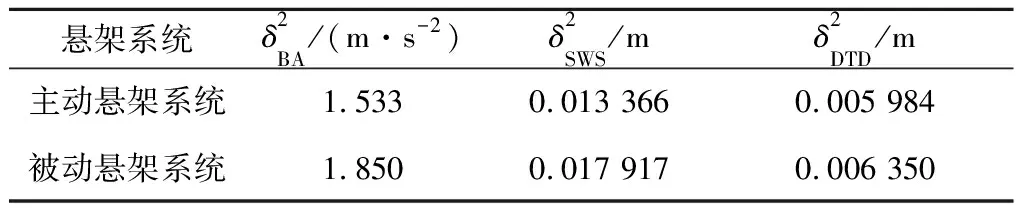
表3 主被动悬架性能指标均方根值Tab.3 Active and passive suspension performance index RMS
(4) 在各性能指标加权系数的确定上采用了G1法,避免了判断矩阵的构造,选择了较合适的加权系数,从而得到一个较好的综合性能.这就提示我们可以根据不同用户的需求去设计悬架,在有侧重点的同时又能使各性能指标达到一个平衡,进而获得最佳的设计效果.
4 结语
参考文献:
[1] 白玉,桑楠.车辆主动悬架舒适性的自抗扰控制[J].解放军理工大学学报(自然科学版),2015,16(6):575-581.
BAI Y,SANG N.Ride comfort of vehicle active suspension using active disturbance rejection control[J].Journal of PLA University of Science and Technology (Natural Science Edition),2015,16(6):575-581.
[2] 罗鑫源,杨世文.基于AHP的车辆主动悬架LQG控制器设计[J].振动与冲击,2013,32(2):102-106.
LUO X Y,YANG S W.Design of a LQG controller for a vehicle active suspension based on AHP[J].Journal of Vibration and Shock,2013,32(2):102-106.
[3] 曾理,孙冬梅,周兵,等.基于改进遗传算法的汽车主动悬架控制器设计[J].计算机测量与控制,2016,24(4):58-60,64.
ZENG L,SUN D M,ZHOU B.Design of controller of active suspension based on improved genetic algorithms[J].Computer Measurement and Control,2016,24(4):58-60,64.
[4] 张海涛.基于人工蜂群算法的车辆主动悬架LQG控制设计[J].噪声与振动控制,2016,36(5):65-69,81.
ZHANG H T.Design of the LQG controller for automobile active suspensions based on artificial colony algorithm[J].Noise and Vibration Control,2016,36(5):65-69,81.
[5] 李仲兴,黄建宇,刘亚威,等.白噪声路面不平度时域模型的建立与仿真[J].江苏大学学报(自然科学版),2016,37(5):503-506,524.
LI Z X,HUANG J Y,LIU Y W,et al.Modeling and simulation on white noise of road roughness in time domain[J].Journal of Jiangsu University (Natural Science Edition),2016,37(5):503-506,524.
[6] 阴运宝,房强,白国华,等.加权系数对主动悬架车辆车身振动的影响研究[J].车辆与动力技术,2013(1):24-28.
YIN Y B,FANG Q,BAI G H,et al.Study on effect of coefficient to vibration of the vehicle body with active suspension[J].Vehicle and Power Technology,2013(1):24-28.
[7] 张志飞,刘建利,徐中明,等.基于改进层次分析法的半主动悬架LQG控制器的设计[J].汽车工程,2012,34(6):528-533.
ZHANG Z F,LIU J L,XU Z M,et al.Design of LQG controller for semi-suspension based on improved hierarchy process[J].Automotive Engineering,2012,34(6):528-533.
[8] 郑帅,朱龙英,张军,等.基于改进AHP的汽车主动悬架LQG控制研究[J].中国农机化学报,2015,36(2):189-193.
ZHENG S,ZHU L Y,ZHANG J.Study of LQG control for vehicle active suspension system based on improved analytic hierarchy process[J].Journal of Chinese Agricultural Mechanization,2015,36(2):189-193.
[9] 喻凡.车辆动力学及其控制[M].北京:机械工业出版社,2010.
YU F.Vehicle dynamics and its control[M].Beijing:Machinery Industry Press,2010.
[10] 陈陌,郭亚军,于振明,等.改进型序关系分析法及其应用[J].系统管理学报,2011,20(3):352-355.
CHEN M,GUO Y J,YU Z M,et al.An improved method for rank correlation analysis and its application[J].Journal of Systems and Management,2011,20(3):352-355.
[11] 王学军,郭亚军,兰天.构造一致性判断矩阵的序关系分析法[J].东北大学学报(自然科学版),2006,27(1):115-118.
WANG X J,GUO Y J,LAN T.Rank correlation analysis of formation of consistent judgment matrix[J].Journal of Northeastern University (Natural Science),2006,27(1):115-118.
[12] 赵文娟,赵丹平,瞿育文,等.基于Matlab/Simulink的主动悬架仿真研究[J].现代制造技术与装备,2015(4):10-13.
ZHAO W J,ZHAO D P,QU Y W,et al.The simulation research of the active suspension based on Matlab[J].Modern Manufacturing Technology and Equipment,2015(4):10-13.
[13] 马继昌,司景萍,高振刚,等.基于Matlab/Simulink的半主动悬架仿真分析[J].公路与汽运,2015(2):13-17.
MA J C,SI J P,GAO Z G,et al.Simulation analysis of semi-active suspension based on Matlab/Simulink[J].Highways and Automotive Applications,2015(2):13-17.
