膝关节镜手术规划及训练系统
2018-07-05莫建清何汉武李晋芳广东工业大学艺术与设计学院广东广州50006广东工业大学机电工程学院广东广州50006
莫建清 何汉武 李晋芳(广东工业大学艺术与设计学院 广东 广州 50006)(广东工业大学机电工程学院 广东 广州 50006)
0 引 言
尽管术中导航技术进展迅速,但术前规划仍然是微创手术的重要的环节。传统的手术规划建立在丰富的临床经验的基础上,医生需要熟悉人体解剖结构,能够通过患者的医学图像数据诊断病情,在大脑中构思病灶与周围组织的相对关系,在此基础上确定具体的手术方案。这种方式极度依赖医生的知识和经验,无法精确地把握患者的信息,工作量大。
计算机辅助手术规划极大地改变了手术规划的方式。早期的医学数据3D可视化,可以让医生从不同角度观察患者的解剖结构。随着技术的进步和计算机辅助手术(CAS)的逐步完善,为医生提供了一些测量和量化计算工具以及交互手段,可以在虚拟环境中测量距离、面积和体积,实现个性化的假体设计以及精确定位植入物的位置,提供了任意的切割、钳夹和缝合等基本的手术操作方式,以及一些定量化的评价工具。此外,有效的信息可视化方式[1]为医生的决策提供更为直观的辅助。
计算机辅助手术规划提高了精度、减少了对医生经验的依赖程度。但是,这种交互式的操作仍然过度依赖医生的经验,医生的劳动强度并没有降低。近年来,自动的手术规划引起了一些学者的关注,在某些手术领域开展了自动化的术前规划的探索。在以往的研究中,与轨迹规划的相关应用研究占据了大部分,包括穿刺针轨迹[2]、射频消融术中放置热探针[3-4]、深度脑刺激[5]的电极以及SEEG电极植入轨迹[6-7]。
截止目前,完全自动的手术路径规划只适合用于简单的应用场合,通常是对线性轨迹的自动规划。对于更加复杂自动手术路径规划,目前甚少有研究提及。Knez等[8]提出一种用于确定胸椎椎弓根螺钉尺寸和植入轨迹的计算机辅助术前规划算法。这种算法建立在几何属性和结构属性提取的基础上,对椎体和椎弓根3D模型的参数化建模,提取椎体结构的几何属性,将几何属性和结构属性结合起来。
相对于交互式的手术规划方法,自动手术规划减轻了医生的劳动强度,提高了规划的效率。但是,由于解剖结构的复杂性和患者病情的多样性,目前完全自动的手术规划仅限于简单的应用。预计今后较长的一段时期内,半自动的交互式术前手术规划方法仍然占据主要的地位。
本文在系统研究微创手术腔体空间分析与理解的基础上,针对膝关节镜手术术前规划的需求,设计并完成膝关节镜手术规划及训练系统的开发工作。本文工作为定量化、自动化的手术规划奠定基础,促进微创手术朝数字化、精准化和个性化方向进一步发展。
1 膝关节腔体的构成
膝关节是人体最大的关节,由胫股关节和髌股关节组成。如图1所示,膝关节腔由股骨、胫骨、髌骨、前后交叉韧带、半月板和髌韧带等器官组织围合而成。依据腔体所在的空间位置,膝关节包含的相关腔体可以分为髌上囊、前内侧室、前外侧室、后腔室和内外侧股骨隐窝等。不同的手术所涉及的目标腔体通常是变化的,即使是同一种手术,由于目标分布的不同,涉及的腔体也可能不同。因此,手术规划中需要针对个性化患者的手术需要、病灶所在位置确定广义腔体的范围,减少不必要的计算。

图1 围合膝关节腔的器官组织
常见的膝关节镜手术包括游离体摘除术、半月板切除术、交叉韧带重建术、关节软骨损伤磨削术、滑膜切除术和关节清理术等。受解剖结构的几何和生理的约束,可供选择的手术入路有9种,如图2所示。尽管可以依据临床统计数据得到不同入路的位置信息以及通过不同入路可观察到的目标信息,但是在实际手术中需要针对患者的情况调整入路的位置,解决异常问题、同时最大限度减少对关节软骨的影响[9]。因此,手术入路规划是术前规划的一项重要内容。

① 前外; ② 前内; ③ 正中; ④ 外上; ⑤ 内上; ⑥ 髌中外; ⑦ 髌中内; ⑧ 后外; ⑨ 后内图2 膝关节镜手术常见入路[10]
2 系统关键技术
广义腔体空间是微创手术器械的运动空间,通常由多个解剖结构围合而成,它不仅包括自然形成的空腔,还包含那些允许人为切开、穿刺以获得必要的器械运动空间的器官,因此本文将其命名为广义腔体GBC(Generalized Body Cavity)。
针对微创手术规划需求,本研究以广义腔体为主要研究对象,以数字化分析为手段,建立起一套系统的广义腔体分析与理解的理论方法和技术。相关的关键技术包括广义腔体建模、语义分割与结构提取,以及可达性分析等。这些关键技术已经在前期研究中解决,相关内容已经发表或者待发表,为了保证文章的完整性,以下作必要的概述。
2.1 广义腔体建模

(1)

(2)

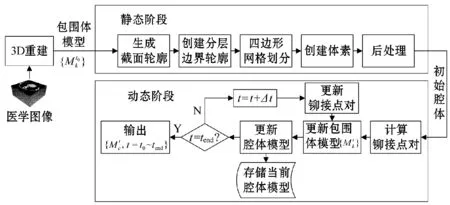
图3 动态腔体模型提取算法流程
2.2 语义分割与结构提取[11]
形状分割、形状的结构提取和表示方法是形状分析和理解的基础。通过形状分析、创建反映组成腔体的各个部分关系的拓扑结构,可为手术路径规划提供依据。
本研究针对抽象形状模型的语义分割需求,提出一种基于拓扑方法的语义分割算法。同时,为了满足微创手术路径规划的需求,研究了腔体模型拓扑结构的表示和创建算法。在分析和比较已有的形状描述子的基础上,提出一种命名为子腔体网络SCN(Sub-Cavity Network)的图状结构表示,可以用来同时编码几何、拓扑和生理信息。这种结构将被应用于手术路径规划、机器人手术和指导手术装置的设计。
对于输入的网格模型M(V,E),被分割成若干个有意义的不重叠的区域,可以形式化定义为:
(3)
式中:Mi为分割得到的子网格;n为子网格的数目。
受Reeb图[12]的启发,通过鞍点的关键环将腔体模型分割成不同的拓扑分支,可以反映腔体被约束分隔的状况。因此,采用的显式轮廓分割算法,以闭合的关键环为主要的分割线将腔体模型分割成若干部分。根据给定的网格模型M和实值标量函数f,关键环L可以通过迭代计算经过鞍点ps的等值线获得,即关键环L={lp0,p1,lp1,p2,…,lpn,p0},其中任意一个点的函数值均等于鞍点的函数值,即:
f(p0)=f(p1)=…=f(pn)=f(ps)
(4)
根据这个思路,实现了切割轮廓线的构造(图 4(b))、语义分割(图4(c))和SCN的创建(图4(d))。其中,关键环是组成切割轮廓线的重要部分,可以用插值法构造(见图 5):
pij=(1-t)vi+tvj
(5)
式中:参数t(0≤t≤1)定义为:
(6)
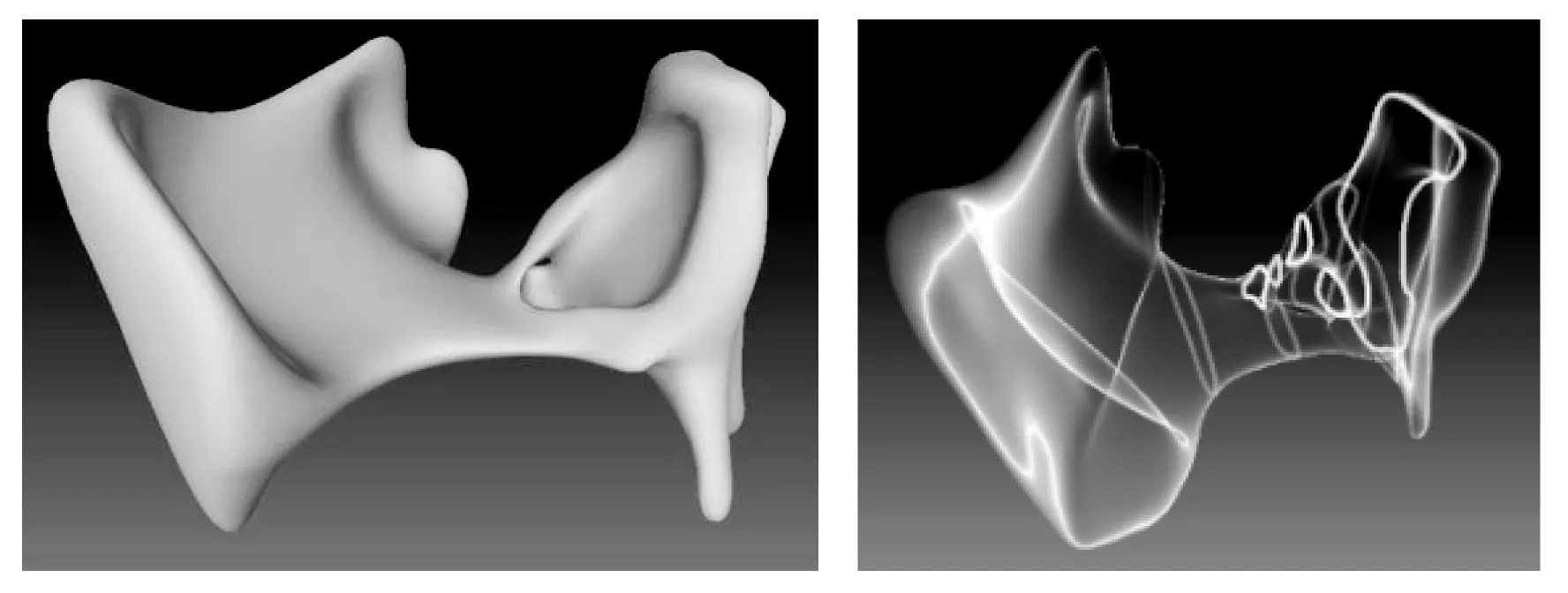
(a) 初始输入模型(b) 构造切割轮廓线
(c) 语义分割结果 (d) 创建SCN图4 SCN的创建流程

图5 用插值法计算关键环
3 系统设计与实现
3.1 系统总体架构
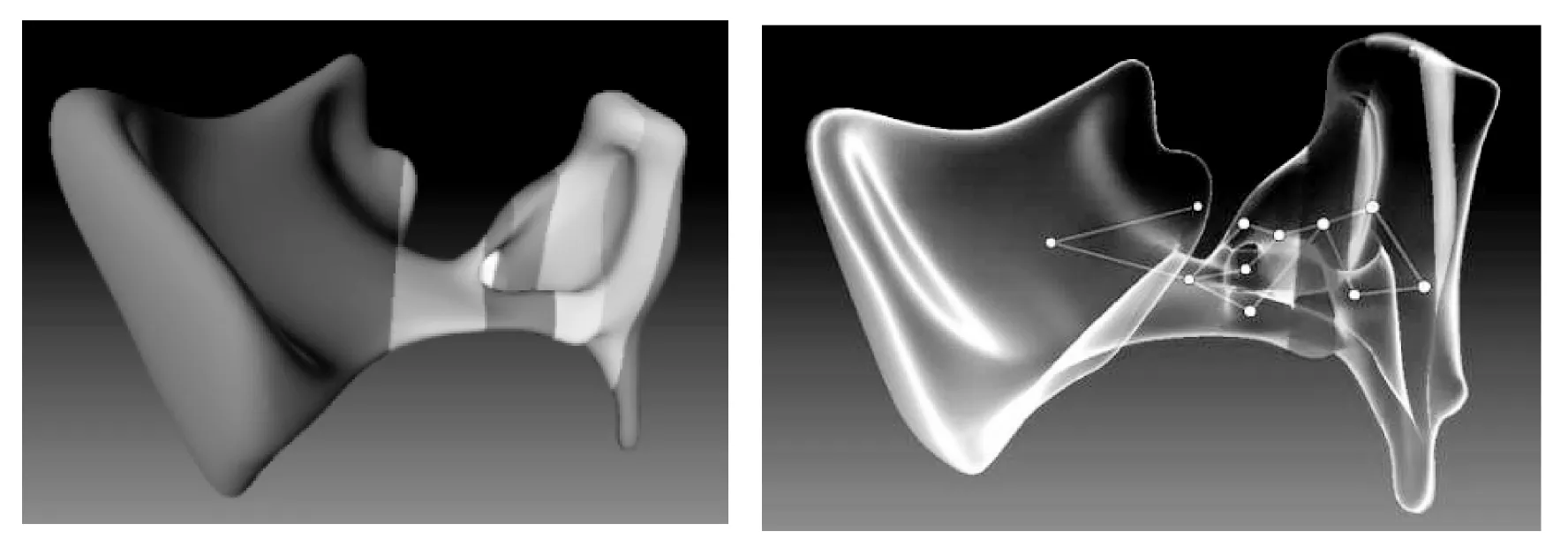
如图6所示的是膝关节镜手术规划及训练系统的总体方案。系统由硬件和软件两个子系统组成。其中,硬件系统主要由手术模拟器和上位机构成。手术模拟器提供双手操作、数据采集和力反馈的功能。上位机负责数据处理、信息管理、功能计算和虚拟场景绘制等工作。依据模块在系统中的地位和通用性,将软件系统划分为基础模块和规划模块两个部分。基础模块的抽象程度更高,用来实现诸如碰撞检测、形变计算、图形渲染和触力觉计算等功能。这些功能可以用于不同的手术规划,通用性强。规划模块侧重于手术量化分析与术前规划的功能,包括手术入路选择、路径规划、腔体空间塑造和器械运动规划等。
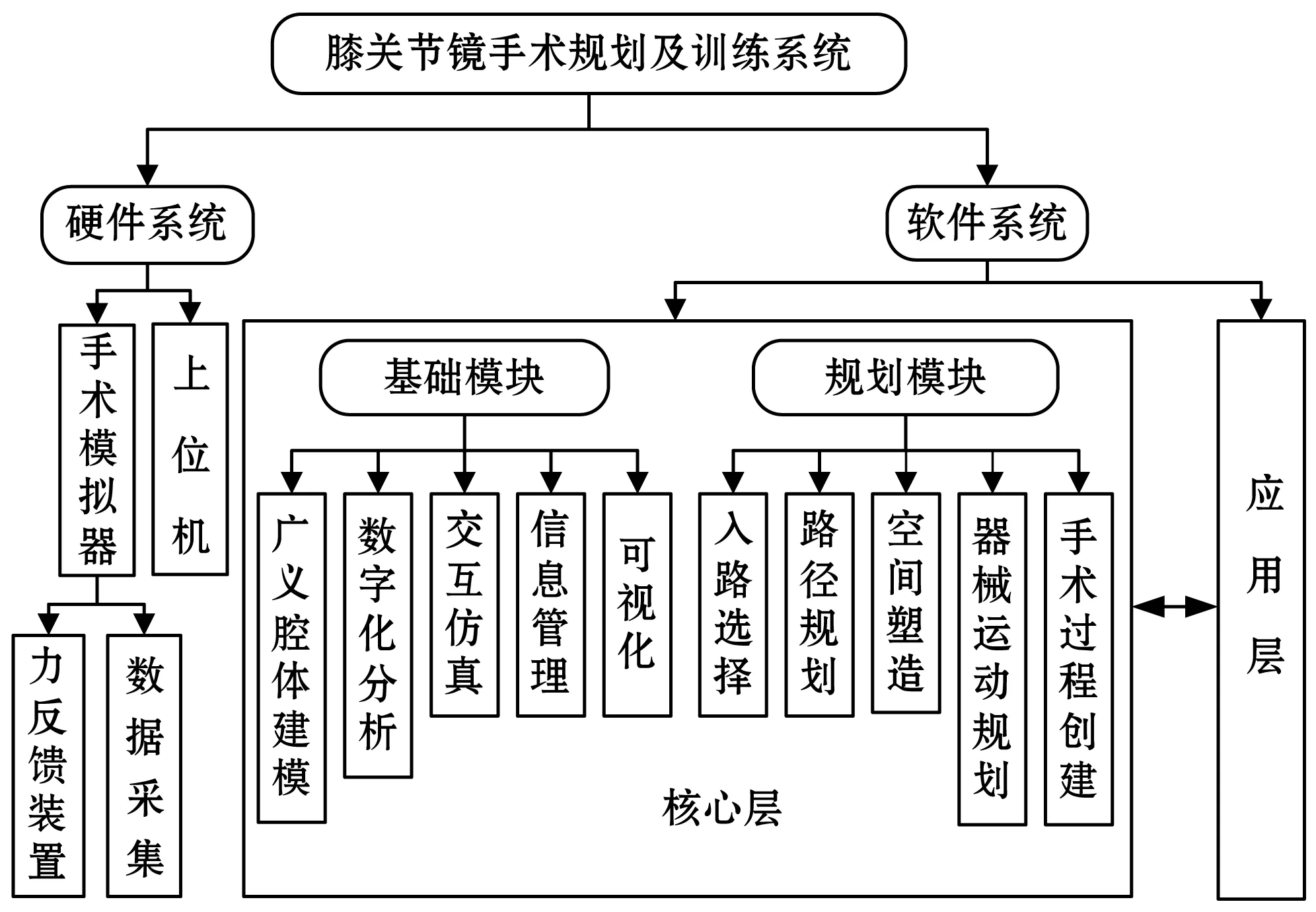
图6 膝关节镜手术规划及训练系统总体方案图
3.2 功能模块详细设计
以下介绍系统的主要功能模块的详细设计方案。
(1) UI模块 为了满足交互式手术规划的需要,设计UI模块,为系统配置、手术方案编辑、交互式规划中的参数设置、信息浏览以及手术操作演练提供必要的接口。图7展示了系统的主界面,左边栏主要用于显示手术场景树;右上的主窗口模拟关节镜的视觉显示效果;右下的辅助窗口用来显示手术过程的信息。

图7 系统主界面(局部)
(2) 预处理模块 预处理模块主要负责数据的加载、初始化和量化指标的计算。利用个性化患者的数据创建广义腔体模型,根据腔体各个部分与毗邻器官组织的关系,对腔体体素的属性赋值,如毗邻组织的编号、最近距离等。利用数据库保存不同器官组织的相关属性,根据编号可以查找属性信息。应用语义分割算法将广义腔体划分为若干子腔体,创建子腔体网络,在量化计算的基础上,对子腔体网络的顶点和边上权值进行赋值。
(3) 手术入路选择与路径规划模块 该模块提供两种手术入路的方式:一是交互式(图8)选择切口的数目和手术入路的方式,二是利用计算结果指导手术入路的选择。膝关节镜手术的入路方式通常为图2所示的9种方式,具体的入路选择由手术的类型和操作的位置具体确定。可以利用数据表保存这些领域知识,以查表的方式确定手术入路。这种方式需要事先存储数据表,对位置的精确描述也比较困难。在本系统中,利用量化评价指标辅助手术入路的确定。临床上,手术切口的位置是通过解剖标志定位的。在本系统中,通过提取解剖标志的轮廓,并将这些轮廓映射到腔体模型表面上,从而获得精确的切口位置。确定手术入路后,根据目标所在位置,计算从不同入路抵达目标子腔体的空间可达性,根据可达性的大小选择合适的路径或者据此进行空间的量化塑造。
(4) 腔体空间塑造模块 经过术前灌液后,膝关节镜手术的腔体空间塑造主要通过胫股关节的屈伸运动实现的。通过建立胫股关节、髌股关节的动力学方程,对不同屈曲度下的腔体空间进行评价,得到有利于器械操作的位姿。
(5) 手术过程创建与手术操作导引模块 根据手术的类型和目标的位置,选择手术方案的模板,由医生进行交互式编辑,生成以手术阶段为粒度的手术过程。然后以此为基础,采用自顶向下的方法对手术阶段进行分解,通过器械运动规划获得更细粒度的手术过程。创建的手术过程作为手术方案的一部分,以xml文件的形式保存。
器械运动规划是手术操作导引的基础。根据选定的器械、器械作用的目标对象及其所在的位置,在领域知识的帮助下,确定器械末端位姿集合,然后根据组成器械各部分结构的关系,求解器械各部分的位姿参数。手术操作导引模块能够辅助医生寻找目标,完成手术操作任务。以手术入路、路径规划和器械的运动规划以及手术过程的规划数据为基础,通过追踪手术过程、器械定位,利用动画引导医生进行操作,同时可以在演练过程中验证手术规划的正确性。
4 应用案例
本节以多发性游离体摘除术为案例,验证并展示系统的应用情况。游离体可出现在关节腔内各个部位,常见的位置包括髁间窝、髌上囊、股骨髁两侧的滑膜隐窝及关节腔后室,其他部位包括前、后交叉韧带之间或交叉韧带股骨髁间的间隙,半月板下方、腘肌腱间隙内。
将膝关节镜下游离体的规划流程划分为预处理、路径规划和器械运动规划三个主要部分。下面以一例左膝多发性游离体患者的数据为例,展示主要过程的任务、内容与结果。
(1) 创建广义腔体模型 根据系统配置自动匹配手术方案模板,用户编辑模板生成初始的手术方案,伴随每个规划进程,手术内容会持续更新。通过解析初始的手术方案,获取解剖结构的信息,加载解剖结构的几何模型。完成模型加载后,选择围合广义腔体的围合器官(或者选择默认的设置),创建膝关节腔体的静态模型。在创建静态模型的基础上,选择胫股关节的屈曲度,可以获得指定位姿下的膝关节广义腔体模型。图9展示的是屈曲度为0的广义膝关节腔模型,以髌骨外上角上方1.5 cm为分层轮廓的上边界,以胫骨平台下方1.0 cm为下边界。
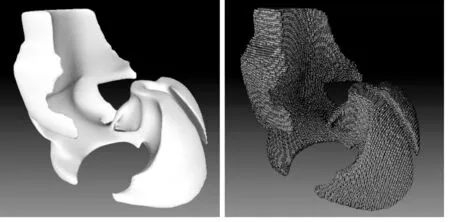
图9 包含髌股关节囊的广义膝关节腔模型
(2) 广义腔体数字化分析 数字化分析的任务包括:计算广义腔体的几何形态评价指标、语义分割和创建子腔体网络。依据2.2节的方法,得到不同屈曲度下腔体的语义分割结果和对应的子腔体网络图,然后确定子腔体边上的权值的各个属性值。图10和图11展示了部分位姿下的结果。
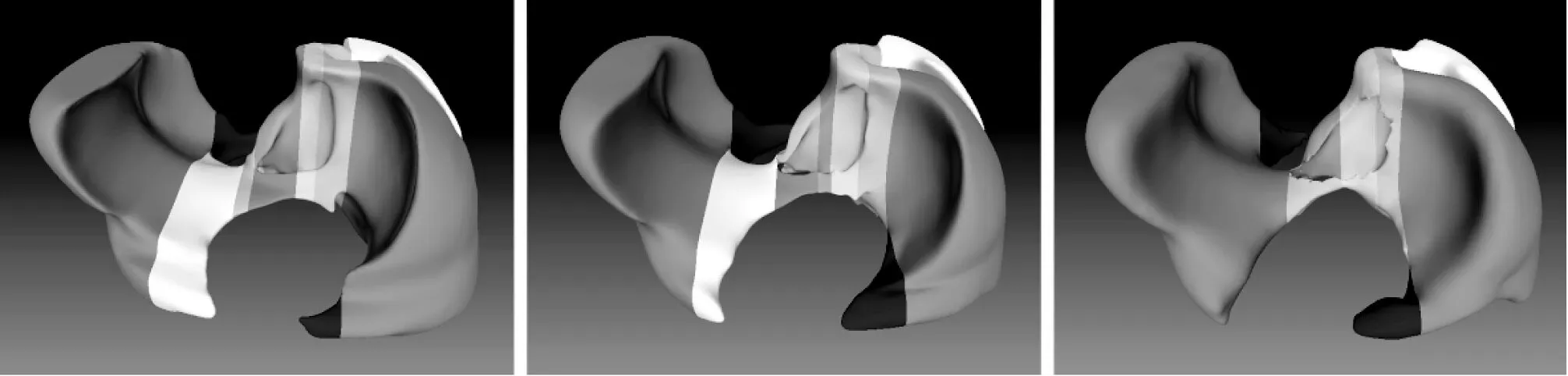
(a) 0°(b) 15° (c) 30°图10 腔体的语义分割结果

(a) 0°(b) 15° (c) 30°图11 子腔体网络图
(3) 入路选择与路径规划 手术入路的选择及入路的定位是手术路径规划的前提。膝关节常见的入路有9种,本系统可提供交互式手段由用户指定入路,或者通过量化计算的方式确定入路方式。通过计算不同入路的相对空间聚集度[11],用于指导入路的选择。图12分别展示了胫股屈伸度为0度时,前内侧入路、前外侧入路、髌韧带入路和髌骨旁内侧入路的相对空间聚集度。图中颜色越浅的局部空间,其相对入路的空间聚集度越小;白色区域代表相对空间聚集度为0,意味着当前位姿下该局部空间难以从指定入路抵达。因此,可以根据目标所在的局部空间相对入路的聚集度大小来选择入路的方式。此外,在不同屈曲度下,局部腔体空间相对同一入路的空间聚集度也会发生变化。因此,需要计算某个胫股屈曲度范围内局部腔体空间相对各入路的空间聚集度。
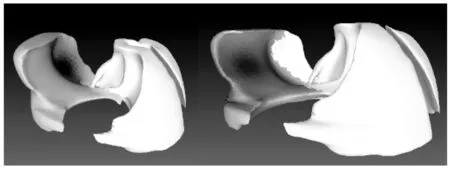
(a) 前内侧入路 (b) 前外侧入路
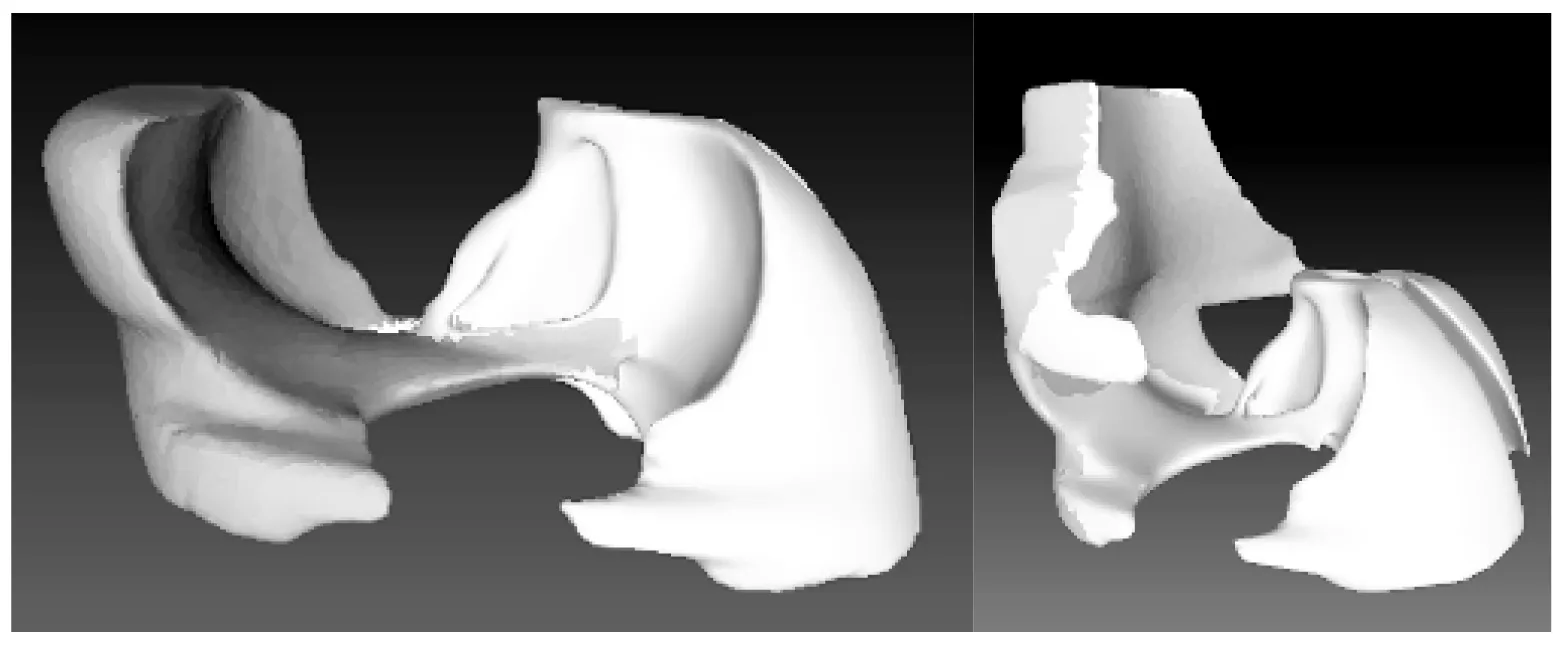
(c) 髌韧带入路 (d) 髌骨旁内侧入路图12 不同入路的相对空间聚集度
多发型游离体摘除术意味着路径规划的类型为多目标路径规划,游离体分布在不同的腔室,需要确定多条路径。在手术入路方式确定后,对于某个具体的游离体,在不考虑游离体运动的前提下,它所在的局部空间是确定的,其候选路径集合也就确定了。对于膝关节镜下游离体摘除术这一特定的应用,候选路径不多,可直接计算候选路径的空间可达性,选取可达性大的作为摘取该游离体的路径。
表1展示了本案例中4个游离体(图 13)的位置和体积信息以及入路选择的结果。
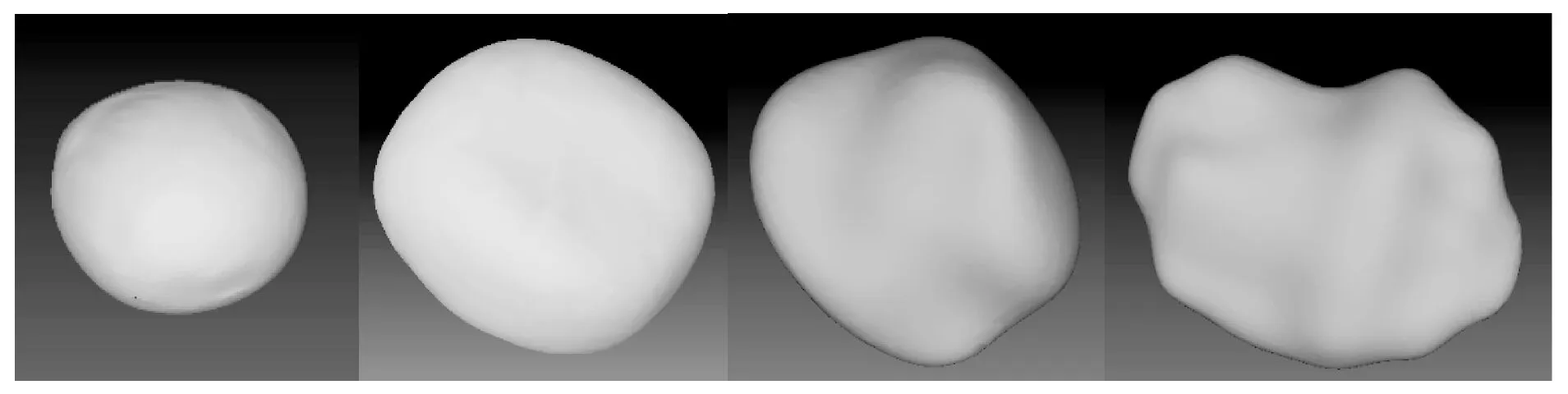
图13 游离体的几何模型(从左至右分别为1~4号)[13]
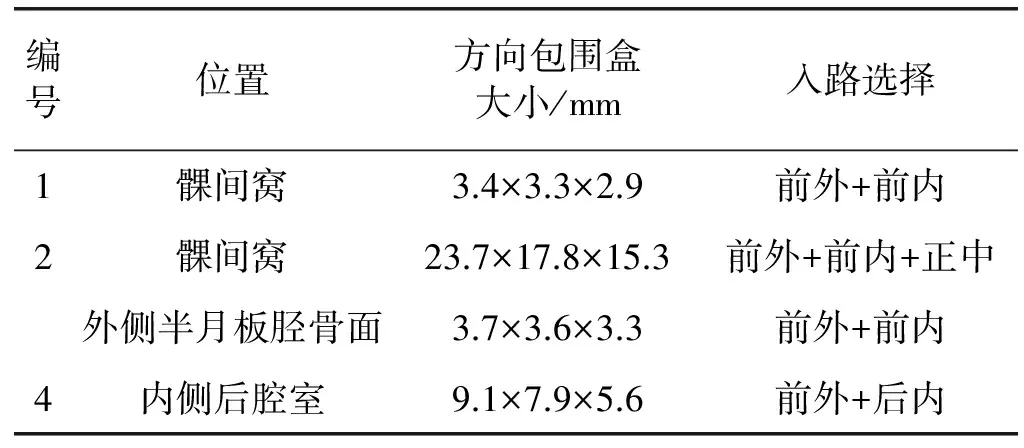
表1 游离体的相关信息及规划结果[13]
(4) 器械运动规划及手术方案生成 本案例中,器械运动规划的主要任务是根据给定的游离体的信息及其取出策略,规划完成任务所需的器械末端位姿集合。以平行于持物钳或咬钳的操作杆方向为z轴,建立如图14所示的局部坐标系。初始化时,令器械的操作杆与前后方向平齐,绕x轴旋转的俯仰角(pitch)α、绕y轴旋转的偏航角(yaw)β、绕z轴旋转的翻滚角(roll)γ设置为0。那么器械末端参考点P的位姿参数可以用四元组(l,α,β,γ)表示,其中l表示参考点与入口的距离。本案例中,2号游离体体积较大,需要通过咬钳夹成若干碎块,逐块取出。根据规划的手术路径,按照每次所能钳夹的最小体积单元将游离体划分成11个碎片。要钳夹某个碎片,首先对齐该碎片的包围盒与咬钳末端包围盒的轴线,根据器械的当前位置调整开口的方向,确定末端位姿。全部的钳夹过程采用贪婪算法规划,每次将剩下的游离体中可达性最好的部分咬除。

图14 器械的局部坐标系
(5) 手术方案虚拟可视化[13]手术方案的可视化主要是手术场景和手术过程的可视化。利用解析算法,将存储于xml文件的手术方案的内容进行呈现,加载解剖结构、游离体和手术器械的模型。然后根据不同粒度的手术过程,按照其定义计算每帧呈现的对象的位姿。图 15展示了钳夹2号游离体的第一个碎片的过程。

(a) 钳夹游离体(b) 取出碎片(c) 剩余游离体图15 手术过程的虚拟可视化
5 结 语
面向膝关节镜手术规划的需求,本文以广义腔体的几何建模和空间形态的数字化分析方法为基础,完成系统的基础模块的设计与开发工作。针对常见的膝关节镜手术规划的应用需求,为医生提供术前规划功能。最后以多发性游离体摘除术为例,验证系统的功能和效果。实验结果表明,该系统能够较好地支持手术方案的制订和方案的可视化呈现。但是,今后需要开展更广泛、深入的实验研究,继续完善系统模块的功能,以实现临床应用的目标。
[1] Herghelegiu P C, Manta V, Perin R, et al. Biopsy Planner-Visual Analysis for Needle Pathway Planning in Deep Seated Brain Tumor Biopsy[J]. Computer Graphics Forum, 2012, 31(3pt2):1085- 1094.
[2] Ebert L C, Fürst M, Ptacek W, et al. Automatic entry point planning for robotic post-mortem CT-based needle placement [J]. Forensic Science, Medicine, and Pathology, 2016, 12(3): 336- 342.
[3] Baegert C, Villard C, Schreck P, et al. Trajectory optimization for the planning of percutaneous radiofrequency ablation of hepatic tumors[J]. Computer Aided Surgery, 2007, 12(2): 82- 90.
[4] Wang K F, Pan W, Wang F, et al. Geometric optimization of a mathematical model of radiofrequency ablation in hepatic carcinoma[J]. Asian Pacific Journal of Cancer Prevention Apjcp, 2013, 14(10):6151- 6158.
[5] Hamzé N, Bilger A, Duriez C, et al. Anticipation of brain shift in deep brain stimulation automatic planning[C]// Engineering in Medicine and Biology Society (EMBC), the 37th Annual International Conference of the IEEE. IEEE, 2015: 3635- 3638.
[6] De M E,Caborni C,Cardinale F,et al.Multi-trajectories automatic planner for StereoElectroEncephaloGraphy (SEEG)[J]. International Journal of Computer Assisted Radiology & Surgery, 2014, 9(6):1087- 1097.
[7] Sparks R, Zombori G, Rodionov R, et al. Automated multiple trajectory planning algorithm for the placement of stereo-electroencephalography (SEEG) electrodes in epilepsy treatment[J]. International Journal of Computer Assisted Radiology and Surgery, 2017, 12(1): 123- 136.
[8] Knez D, Likar B, Pernuš F, et al. Computer-Assisted Screw Size and Insertion Trajectory Planning for Pedicle Screw Placement Surgery[J]. IEEE Transactions on Medical Imaging, 2016, 35(6): 1420- 1430.
[9] Caruntu D I, Hefzy M S. 3-D anatomically based dynamic modeling of the human knee to include tibio-femoral and patello-femoral joints[J]. Journal of biomechanical engineering, 2004, 126(1): 44- 53.
[10] 敖英芳.膝关节镜手术学[M].北京大学医学出版社,2004.
[11] Mo Jianqing, He Hanwu, Li Jinfang, et al. Semantic Segmentation and Structure Representation of the Generalized Body Cavity[J]. Journal of Information Science and Engineering, 2017, 33(5):1213- 1235.
[12] Patanè G, Spagnuolo M, Falcidieno B. A Minimal Contouring Approach to the Computation of the Reeb Graph [J]. IEEE Transactions on Visualization and Computer Graphics, 2009, 15(4): 583- 595.
[13] 莫建清, 何汉武. 数字化手术方案的虚拟可视化呈现[J]. 现代计算机, 2017(20):54- 58.
