气动横梁机械手P L C控制实验系统设计
2018-07-04广东松山职业技术学院
广东松山职业技术学院 谭 芳
1 引言
工业机械手是一种在程序指令控制下,模拟人手的抓取、搬运等动作而设计的机电一体化设备。气动机械手具有操作方便、拆卸简单,适用于学生教学的[1]。气动横梁机械手是通过电磁阀控制气动回路来实现机械手的夹紧和松开、下降和上升、前进和后退以及旋转一定角度。本文应用PLC对气动横梁机械手控制进行实验研究。
2 气动部分工作流程
气动横梁机械手一共有10动作流程:下降→抓料→上升→前进→下降→旋转→放料→反旋→上升→后退,十个动作步,最后回到原点;如果机械手下方有新的零件,机械手自动进入下一周期的工作。机械手的气动控制回路如图1所示。电磁阀均为单线圈弹簧复位的2位5通电磁阀,每个电磁阀出口均有调节阀控制流量。观察5个气缸的实物位置以及对应的电磁阀。

图1 气动控制回路
3 PLC控制工作介绍
3.1 PLC控制系统的输入与输出
系统使用CPU315-2DP进行控制,根据气动横梁机械手的要求确定输入输出信号,并分配地址,如表1、2所示。

表1 输入信号地址分配表
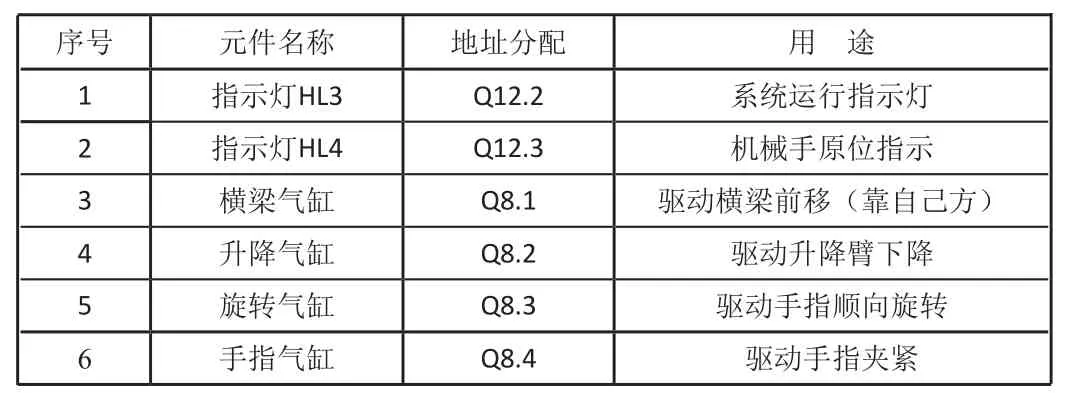
表2 输出信号统计表
传感器为PNP型,有三个接线端子,“+V”端子要接24V电源正端,“0V”端子接24V电源负端,信号端按表1分配关系接SM321输入模块的输入端。
限位开关是磁性开关,有两个接线端子,“+”端子还要接24V电源正端,“-”端子按表2.5分配关系接SM321输入模块的输入端。SM321输入模块的输入公共端“M”端还要接24V电源负端。输入接线原理图如2所示,输出接线原理图如图3所示。

图2 输入接线图

图3 输出接线图
3.2 系统程序结构
系统采用模块化编程的方法,子程序为FC1和FC3。各程序的功能如下:
OB1:主程序
FC1:系统运行指示,以及机械手工作方式控制
FC3:机械手的搬运功能
OB100:初始化初始步

图4 机械手控制FC3的顺序功能图
3.3 主程序流程图
程序说明:
1)FC3用来实现机械手搬运功能。图4是其顺序功能图,用位存储器M2.0 ~ M3.2分别存放如下工作步,初始步→下降步→抓料步→上升步→前进步→下降步→旋转步→放料步→反转步→上升步→后退步,共十个动作步,最后回到原点。
图中T12~T15分别表示夹紧延时、旋转延时、放松延时和反转延时定时器,定时时间为1秒钟。因为电磁阀均为单线圈弹簧自动复位型,所以采用置位指令S驱动相应的线圈。
2)FC3可以采用S7-Graph的编程方法,该方法能够快速、准确地编制顺序控制程序,控制气动横梁机械手的执行,提高工作效率。
3)OB100用于初始化初始步M2.0,程序下所示。

4 结束语
本文运用PLC实现了气动横梁机械手控制系统教学案例设计,给学生提供了良好的实践锻炼平台。在实验室应用中取得了良好的教学效果,是一种经济的控制方案。
[1]董胜,武广斌,耿德旭,王佳南,王梦龙.气动机械手控制实验系统设计[J].实验室研究与探索,2017,36(11):77-81.
[2]罗庚兴,宁玉珊.大中型PLC应用技术[M].北京:北京师范大学出版社,2010,8.
