骨盆减重康复设备研究现状和进展
2018-07-04于婷婷雷婉月陈志琪韩轶博
于婷婷, 雷婉月, 陈志琪, 韩轶博, 任 武
(新乡医学院生物医学工程学院, 河南 新乡, 453003)
骨盆是人体骨骼的支点,主要作用是支撑身体,在下肢康复减重训练中扮演着重要的角色。骨盆将力量从下肢转移到躯干,并借助于躯干向前推进骨盆,将人体躯干质心(COM)置于支撑腿上,以便另一条腿进行摆动[1]。骨盆还可以调节躯体COM的垂直运动,以减少行走时的能量消耗。近年来,计算机技术和人工智能不断发展,促进了医疗设备的自动化和智能化,通过骨盆减重方法设计研制的康复医疗设备在临床康复医学上具有广阔的发展前景。智能化的骨盆减重康复设备与核磁共振技术、肌电与机器人技术结合,可让截瘫患者在没有任何平衡的帮助下按照预定步态行走,进而为截瘫患者提供舒适化、高质量的治疗[2]。相比于传统的康复设备,基于骨盆减重研发的新型智能设备有助于提高患者行走稳定性和步态治疗的效果,降低医护人员工作负荷[3]。本文通过对国内外骨盆减重方法在康复医疗中的研究进展进行综述,为我国基于骨盆减重康复设备的发展提供参考。
1 骨盆减重的研究意义
骨盆减重是指在下肢瘫痪患者康复行走过程中,对患者躯干提供部分体质量支持以提高患者行走稳定性和平衡性的方法[4]。骨盆减重在临床上弥补了传统吊带不能抵抗骨盆旋转的缺点,它通过获得患者骨盆的运动轨迹[5],达到有效控制患者按照正常轨迹恢复自身步态的目的。目前,我国老龄化人口约占总人口数的13.44%,并且由脑卒中、脑中风等疾病或关节、脊髓损伤引起的人体运动障碍患者也有所增加。针对老人、患者的康复问题,一些下肢运动康复机械设备相继诞生。下肢矫形器在医疗器械设备市场上占很大的比重[6],其通过力的作用来预防和矫正畸形,能够起到一定程度的治疗效果。但在长期的实践过程中发现,传统的下肢矫形器在使用中不能抵抗患者骨盆的旋转,从而影响患者的步态。有些矫形器自重过大束缚了患者的双手,需要借助外人的帮助才能进行正常康复训练。因此骨盆减重对患者步态的康复有重要意义。
2 国内外骨盆减重康复设备研究现状
2.1 国外研究现状
骨盆减重方法的应用始于21世纪,目前在国外已有不少的康复设备经过临床实验验证并投入到患者的康复治疗当中。
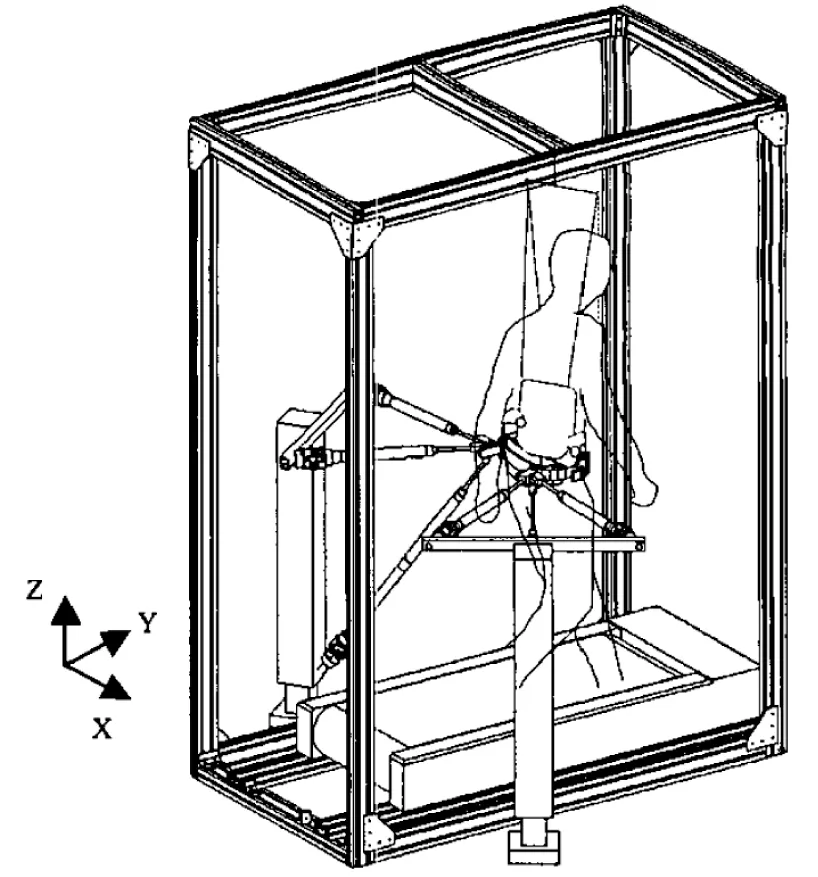
图1 骨盆辅助机械手(PAM)
2.1.1 骨盆辅助机械手(PAM): 2003年,Ichinosel等[7]采用PAM的方法,设计出在跑步机上用来测量和控制患者盆腔运动的机器人装置(图1),此种方法记录的骨盆运动轨迹对现有的运动康复训练提供了很好的数据支持。
2.1.2 机器人装置KineAssist和盆腔辅助操作器: 2005年,Peshkin等[8]针对患者康复过程中的行走问题,以提高稳定性和平衡性为目的,采用对患者躯干提供部分体质量支持和姿势转矩的方法,研发了一种可保持患者平衡能力的机器人装置KineAssist。同年,Aoyagi等[9]使用反馈控制算法协助主体改变他们的步长和周期,进而研发一种盆腔辅助操作器。
2.1.3 机电体重支持系统: 2006年,Lalonde等[10]采用被动弹性元件和电力驱动器提供恢复力的方法,通过可调节长度的绳索连接患者和电力驱动器,开发了一种新型的机电体重支持系统,对提高人体步态康复的治疗效果具有重要意义。2007年,针对膝骨关节炎患者,Fregly等[11]采用建立成本函数的方法,在传统步态运动基础上进行改良,使膝关节内收扭矩降到最低,从而对患者的步态变化进行更准确地预测。2009年,新墨西哥州立大学的研究人员发现波动的恢复力可以降低地面反作用力,基于此原理提出的骨盆支撑系统在步行辅助机器人中有重要的应用[12]。
2.1.4 新型下肢矫形器WalkTrainer: 2008年,Stauffer等[13]针对截瘫患者的康复问题设计了一种由腿部和骨盆矫形器组成的装置WalkTrainer,此技术是利用机器人技术和闭环肌肉刺激对截瘫患者进行康复训练,为以后康复设备的发展奠定了基础。2009年,WalkTrainer团队采用生物力学的方法,通过动态模拟和机械设计,设计出一种新型的下肢矫形器[14],主要由轻质外骨骼组成的人腿-机器界面和由电机及传感器组成的机械腿两个部分。新型的下肢矫形器在截瘫患者的临床试验中体现出了更好的步态治疗效果。
2.1.5 盆腔辅助操作器: 由关节或脊髓受损造成骨盆不能正常运动的患者逐渐增多,骨盆矫形器、盆腔辅助操作器相继诞生。2010年,Watanabe等[15]设计出辅助盆腔运动的无源装置,首先对不同体质量的受试者进行建模,找到骨盆旋转的时间轨迹,并确定设备的最佳设计参数,再进行仿真。实际使用中将该装置与患者骨盆相连接,对其施加适当外力进而使在跑步机上运动的患者的骨盆能够按照正常的轨迹进行运动。
2.1.6 步态训练器: 2011年,在美国举办的智能机器人研讨会议中,针对下肢受损患者在地面移动平台上的行走转弯问题,研制出一种步态训练器,其根据逆运动学分析,提出了一种同步运动生成方法:即预先设定好人体盆腔的运动轨迹,并指定出十个点,从指定步长和高度获得脚踝的运动曲线,最终根据指定点进行曲线拟合,测评结果表示该装置具有有效性和平滑性[16]。2013年,Kai等[17]针对患者的站立问题,以防止患者跌倒为目的,设计出一种利用恒力弹簧支撑患者局部体质量的减重装备,骨盆减重设备得到进一步的发展。同年,哥伦比亚大学针对步态康复的骨盆运动问题,提出了新的控制方法来指导和改变横向骨盆的运动[4],其利用电缆驱动的骨盆机器人在横向平面上施加导向力,不增加骨盆的外部运动约束,结果表明,该策略可以纠正不同患者群体的异常骨盆轨迹,能够引导和纠正骨盆的轨迹,达到节能和平衡步态的目的。
2.1.7 步行康复机器人(COWAL): 2014年Shin等[18]通过人体步态运动和身体测量数据,引入新的人体元特征,采用K-NN算法合成主体的个性化骨盆运动,进而研发出具有骨盆运动训练能力的步行康复机器人COWAL。同年,Otani等[19]在利用弹簧加载倒立摆模型的基础上提出了SLIP2模型来改善跑步机器人。该模型由身体、腿和骨盆三部分组成,采用控制骨盆振动、跑步速度和上身稳定的方法,实现机器人的跳跃和跑步。
2.1.8 恒压推力装置(CPFD): 2014年,Lenzo等[20]提出了一种新的恒压推力装置CPFD,该装置利用具有弹簧串联机械手为设备提供重力平衡并保持恒定。相关实验采用评估外力对步态运动和时间影响的方法进行试验验证,得出该装置能够施加大致恒定的推力,影响主体的节奏以及髋关节和踝关节的运动,并能降低步行的代谢成本。
2.2 国内研究现状
2013年,南京大学针对跑步机运动康复问题,以减轻患者部分下肢支撑体质量为目的,通过动力学仿真实验,得出体质量支撑系统可以补偿任何期望的重力和惯性力量[21],具有实际减少系统附着人员质量的作用,骨盆减重设备在国内逐渐发展开来。同年,中国西安交通大学针对中风或脊髓损伤后住院患者的步行康复问题,应用了新的下肢矫形器[4],该设备由8个自由度的动力外骨骼、骨盆支撑的主动体质量支撑系统、跑步机和脚踏车四个主要模块组成。2014年,北京工业大学针对人体运动控制问题,以捕捉人体运动为目的,设计了一种可穿戴的系统装置[22]。该系统由皮带、接头和连杆组成,利用角度编码器、力传感器和姿态传感器元件直接捕捉拍摄对象的运动轨迹,为新型的康复设备提供了理论支持与数据统计。
3 小结
骨盆减重是通过减轻患者的自身质量,辅助患者行走,达到下肢康复的目的。骨盆减重装置根据患者的骨盆运动轨迹进行康复,不会在训练康复的过程中对肌肉造成痉挛。骨盆减重在临床康复医学上具有广泛的应用前景,相对于传统的康复手段,骨盆减重减轻了治疗师和患者的负担,最大限度提高人体步态康复治疗效果。当然,目前骨盆减重设备尚处于发展阶段,其自身还存在局限性,如一些可穿戴的系统装置,因患者的身材大小而无法得到有效的契合,本研究就骨盆减重设备进一步需要探究的问题概括如下:①检测骨盆运动轨迹在骨盆康复设备的研发中非常重要,但由于其参数多,肌肉活动的阶段性等因素,使骨盆的运动轨迹难以测量和分析,因此如何改进测量装置和算法,提高减重康复设备的生成轨迹与自然步态的拟合度是未来研究的热点。②骨盆减重具有自身的局限性,在步行辅助机器人中,恒定力的控制问题是研究中遇到的难题。③减重训练至少需要2名治疗师的配合,如何改进减重康复装置,使其达到人员配比的高效化,减少人员投入也将是将来研究的热点和难点。④如何更好地将骨盆减重设备与核磁共振、肌电等技术相结合也是未来需要进一步完善的方面。虽然骨盆减重方法在临床试验中尚处于研究试验阶段,还没有大面积推出有效的康复治疗设备,但随着科技和国家经济水平的提高,在临床康复治疗中骨盆减重方法可以为提高我国相应患者的康复质量提供技术和设备支持。
[1] MOKHTARIAN A, FATTAH A, AGRAWAL S K. A novel passive pelvic device for assistance during locomotion[C]// IEEE International Conference on Robotics and Automation. IEEE, 2010: 2241-2246.
[2] SALIM M S, MAKNOH F N, OMAR N, et al. A biomechanical analysis of walking and running on a treadmill in different level of inclined surfaces[C]// International Conference on Biomedical Engineering. IEEE, 2012: 308-312.
[3] HUANG Q, FUKUHARA Y. Posture and Vibration Control Based on Virtual Suspension Model Using Sliding Mode Control for Six-Legged Walking Robot[C]// Ieee/rsj International Conference on Intelligent Robots and Systems. IEEE, 2007: 5232-5237.
[4] WANG L, WANG S, ASSELDONK E H F V, et al. Actively controlled lateral gait assistance in a lower limb exoskeleton[C]// Ieee/rsj International Conference on Intelligent Robots and Systems. IEEE, 2013: 965-970.
[5] KIM S, KIM C H, YOU B, et al. Stable whole-body motion generation for humanoid robots to imitate human motions[C]// Ieee/rsj International Conference on Intelligent Robots and Systems. IEEE Press, 2009: 2518-2524.
[6] WATANABE T, KOBAYASHI Y, FUJIE M G. Pelvis motion analysis for gait phase estimation toward leg-dependent body weight support at different walking speed[C]// Engineering in Medicine and Biology Society, Embc, 2011 International Conference of the IEEE. IEEE, 2011: 1590-1593.
[7] ICHINOSEL W E, REINKENSMEYER D J, AOYAGI D, et al. A Robotic Device for Measuring and Controlling Pelvic Motion During Locomotor Rehabilitation[C]// Proceedings of the 25th Annual lnlcmalional Conference of the IEEE EMBS, 2003: 1690-1693.
[8] PESHKIN M, BROWN D A, SANTOS-MUNNE J J, et al. KineAssist: a robotic overground gait and balance training device[C]// International Conference on Rehabilitation Robotics. IEEE, 2005: 241-246.
[9] AOYAGI D, ICHINOSE W E, HARKEMA S J, et al. An assistive robotic device that can synchronize to the pelvic motion during human gait training[C]// International Conference on Rehabilitation Robotics. IEEE Xplore, 2005: 565-568.
[10] LALONDE N M, DANSEREAU J, PAUGET P, et al. Accessing the influence of repositioning on the pelvis' 3-D orientation in wheelchair users[J]. IEEE Trans Neural Syst Rehabil Eng, 2006, 14(1): 76-82.
[11] FREGLY B J, REINBOLT J A, ROONEY K L, et al. Design of patient-specific gait modifications for knee osteoarthritis rehabilitation[J]. IEEE Trans Biomed Eng, 2007, 54(9): 1687-1695.
[12] WATANABE T, OHKI E, ANDO T, et al. Fundamental study of force control method for pelvis-supporting body weight support system[C]// IEEE International Conference on Robotics and Biomimetics. IEEE, 2009: 1403-1408.
[13] STAUFFER Y, ALLEMAND Y, BOURI M, et al. The WalkTrainer-a new generation of walking reeducation device combining orthoses and muscle stimulation[J]. IEEE Trans Neural Syst Rehabil Eng, 2009, 17(1): 38-45.
[14] ALLEMAND Y, STAUFFER Y, CLAVEL R, et al. Design of a new lower extremity orthosis for overground gait training with the WalkTrainer[C]// IEEE International Conference on Rehabilitation Robotics. IEEE, 2009: 550-555.
[15] WATANABE T, OHKI E, KOBAYASHI Y, et al. Leg-dependent force control for body weight support by gait cycle estimation from pelvic movement[C]// IEEE International Conference on Robotics and Automation. IEEE, 2010: 2235-2240.
[16] WATANABE T, KOBAYASHI Y, FUJIE M G. Pelvis motion analysis for gait phase estimation toward leg-dependent body weight support at different walking speed[C]// Engineering in Medicine and Biology Society, Embc, 2011 International Conference of the IEEE. IEEE, 2011: 1590-1593.
[17] KAI Y. Development of a walking support machine with a lift device controlled by a servo brake[C]// Sice Conference. IEEE, 2014: 1728-1733.
[18] SHIN S Y, HONG J, CHUN C, et al. A method for predicting personalized pelvic motion based on body meta-features for gait rehabilitation robot[C]// Ieee/rsj International Conference on Intelligent Robots and Systems. IEEE, 2014: 2063-2068.
[19] OTANI T, YAHARA M, URYU K, et al. Running model and hopping robot using pelvic movement and leg elasticity[C]// IEEE International Conference on Robotics and Automation. IEEE, 2014: 2313-2318.
[20] LENZO B, ZANOTTO D, VASHISTA V, et al. A new Constant Pushing Force Device for human walking analysis[C]// IEEE International Conference on Robotics and Automation. IEEE, 2014: 6174-6179.
[21] LU Q, LIANG J, QIAO B, et al. A New Active Body Weight Support System Capable of Virtually Offloading Partial Body Mass[J]. IEEE/ASME Transactions on Mechatronics, 2013, 18(1): 11-20.
[22] GONG D, XIE X, WANG B, et al. Design of a system capture human gait data in joint space[C]// Intelligent Control and Automation. IEEE, 2015: 5600-5604.
