C-EPS在某新能源客车上的匹配应用
2018-07-04杨情操邹小俊张汤赟
杨情操,朱 晓,邹小俊,张汤赟,叶 进
(南京依维柯汽车有限公司,江苏 南京 211806)
电动助力转向系统(Electronic Power Steering,简称EPS)是一种用于辅助驾驶员改变或保持汽车行驶方向的专门机构,已广泛使用在包括传统能源和新能源的各种类型乘用车上[1]。传统能源客车装有发动机,有通过发动机驱动的转向泵存在,一般采用液压助力转向系统(Hydraulic Power Steering,简称HPS),HPS引起的燃油消耗约占整车总燃油消耗的3%~5%[2],即使采用节能技术使重型商用车HPS的能耗降低20%,其引起的燃油消耗量依然占整车总燃油消耗的2.4%~4%[3]。
新能源客车的总质量较大,且没有传统发动机,一般采用电动液压助力转向系统(Electronic-Hydraulic Powerassisted System,简称EHPS)[4]。EHPS需要先将电能转换为动能,再将动能转换为压力,驱动传统液压助力转向系统工作。转向系统对响应灵敏度要求较高,传统转向系统只能依靠驾驶员的操作实现稳定控制,而通常驾驶员的反应迟滞超过0.5 s[5],其中既有能量转换中的能源损失,又有因能源转换中的时间滞后,一般为解决时间滞后问题,有常流时转向泵或储能装置两种模式,这会造成能源损失加剧。在新能源客车上匹配应用EPS,与EHPS相比,将会降低能耗和提高响应速度。本文对某新能源客车采用EPS系统,从选型、布置、实施及验证等方面进行了相关分析。
1 新能源客车EPS的选型设计
目前,EPS根据助力位置不同,其结构形式也分为转向管柱助力形式(C-EPS)、小齿轮助力形式(P-EPS)、齿条助力形式(R-EPS)等几种[6],其技术状态、特性见表1。
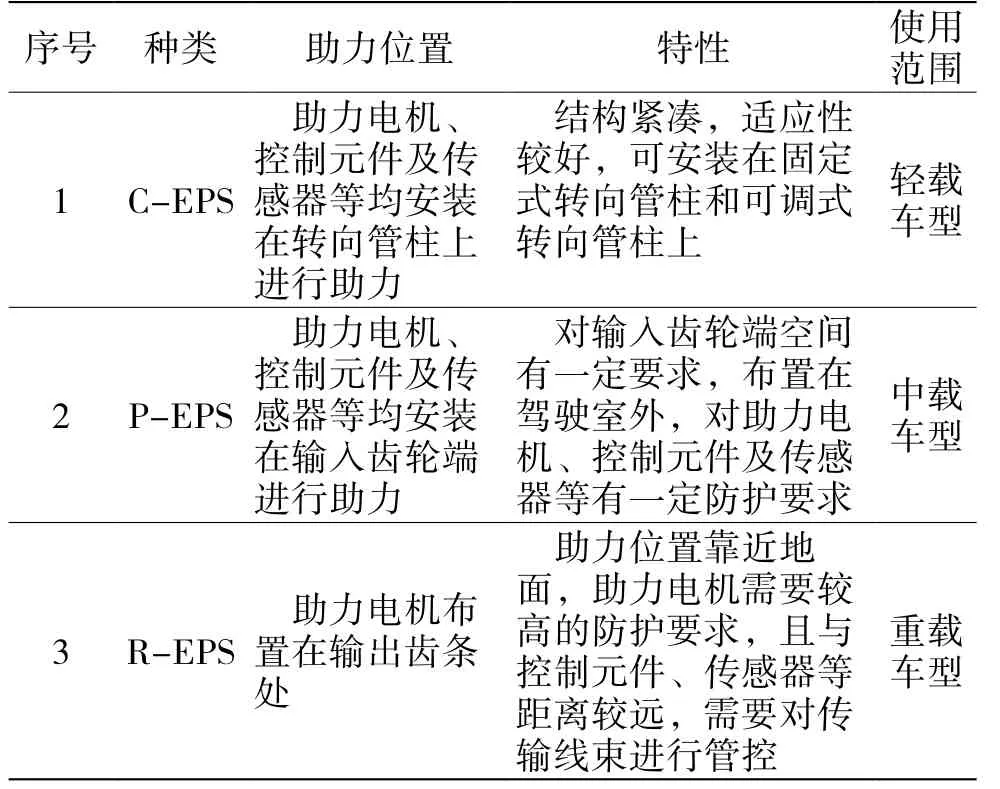
表1 不同种类EPS特性
本文所述新能源客车采用前双摆臂扭杆独立悬架结构,输入齿轮及输出齿条处空间较为紧凑,布置P-EPS及R-EPS空间不足,且整车参数属于轻载车型,如某新能源客车整车参数见表2,故选择C-EPS结构。
C-EPS原理为:当操纵转向盘时,装在转向盘轴上的传感器测出转向轴上的转角信号,该信号与车速信号同时输入到电子控制单元。电子控制单元根据这些输入信号,确定助力转矩的方向和大小,然后将这些数据信息传递到控制器中控制电机的电流大小以及转动方向,从而调整转向辅力的大小达到最佳工况。电动机的转矩通过减速机构减速增矩后,加在汽车的转向管柱上,使之得到一个与汽车工况相适应的转向辅助力。转向辅助力最终传递到操纵机构,使左右车轮进行转向,此时驾驶员在转动转向盘时就会发现自身不需要很大的力就可以使之发生转向[7]。
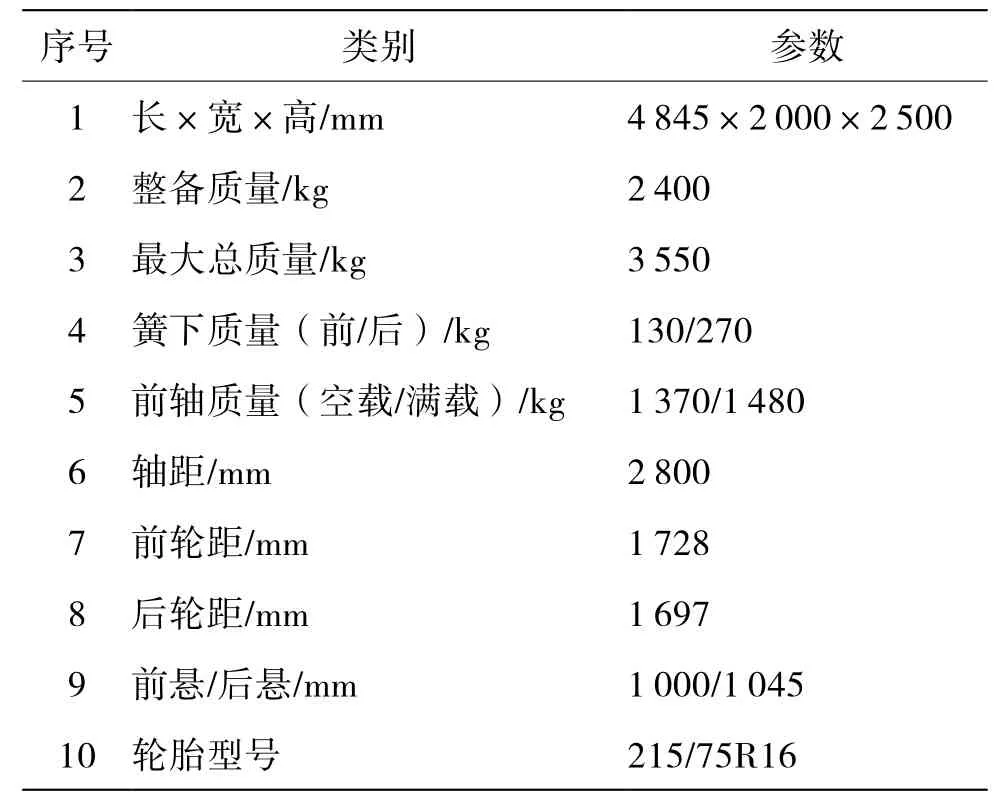
表2 某新能源客车整车参数表
利用半经验公式来计算汽车在路面上的原地转向力矩MR,单位Nmm。

式中:f——轮胎与地面间滑动阻力系数,一般取0.7;G——转向轴负荷,N,该车转向轴满载载荷为1 480 kg,即为14 504 N;P——轮胎气压,MPa,该车轮胎气压为0.45 MPa。
将以上的数据代入(1)式中,得MR=607 578 Nmm。
该新能源客车采用齿轮齿条式机械转向器,在不带助力系统时,作用在转向盘上的手力为Fh,单位N。

式中:Ll——转向梯形臂长;Dsw——转向盘直径;iw——转向器角传动比;η+——转向器正效率。
将以上的数据代入(2)式中,得Fh为75 N。
2 新能源C-EPS布置方案
C-EPS由传感器 、蜗轮、蜗杆、蜗轮轴、输入轴、减速壳体 、转向管柱、电机、控制器ECU等组成。采用有刷电机,非接触式扭矩传感器及转角传感器,具备自动回正功能和自动间隙补偿功能,工作温度在-40~85 ℃之间,其布置如图1所示。
3 新能源客车C-EPS参数选择及设定
C-EPS相关参数见表3,C-EPS电气性能见表4,C-EPS蜗轮蜗杆减速机构结构如图2所示,其相关参数见表5。

图1 C-EPS布置示意图
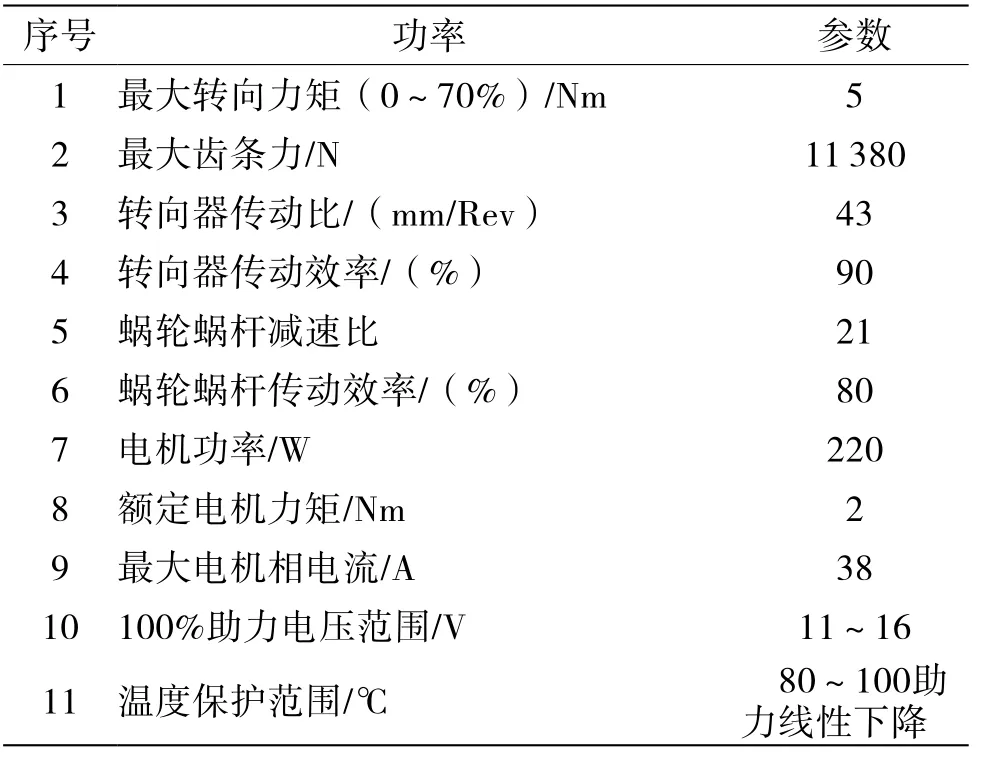
表3 C-EPS相关参数

表4 C-EPS电气性能

图2 蜗轮蜗杆减速机构结构
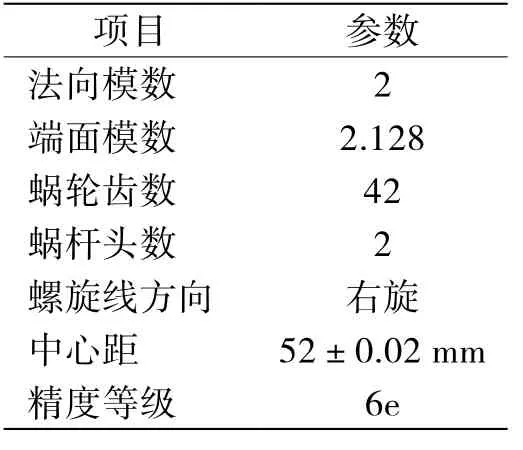
表5 蜗轮蜗杆相关参数
蜗轮轴、输入轴限位角度为±7°,扭杆扭转刚度为(1.7~1.8)Nm/(°),实际工作角度为±4°,输入轴刚度曲线如图3所示。
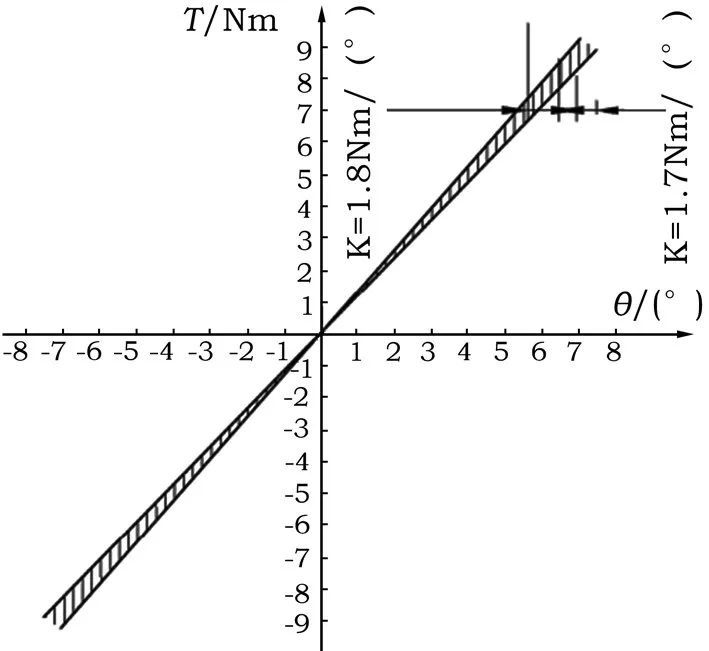
图3 输入轴刚度曲线
4 新能源客车C-EPS试验验证
在装配C-EPS的新能源客车上进行相关试验,在转向盘上安装测力计,对EHPS及C-EPS两种状态的转向盘力矩进行测量,对比结果见表6。从表6可知,采用C-EPS后,转向盘上力矩明显降低。
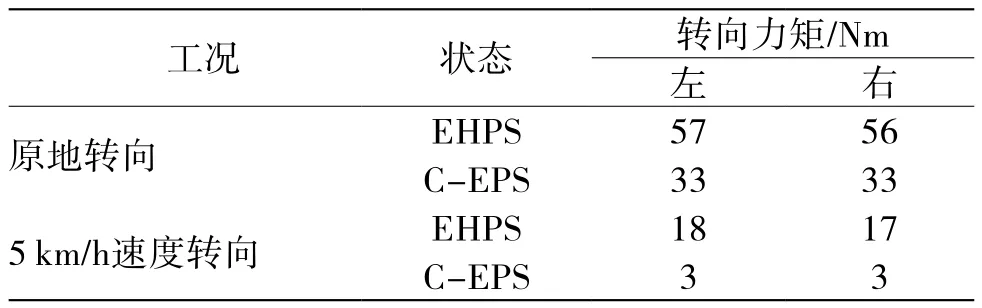
表6 EHPS及C-EPS两种状态力矩对比
对安装C-EPS后新能源客车相关性能目标符合性进行分析,结果见表7。
从表7可知,经评估,原地最大转向操作力矩、机械助力管柱传动效率、总成助力对称性等参数达到设定目标值。
5 结语
通过C-EPS在某新能源客车上的布置匹配应用,可知采用C-EPS电动助力转向系统,转向力矩等能达到甚至优于EHPS水平,原地最大转向操作力矩、机械助力管柱传动效率、总成助力对称性等参数达到设定目标值,为后续相关车型开发提供了借鉴。

表7 C-EPS性能目标符合状态
[1] 胡宗举.乘用车助力转向系统控制器的设计与研究[D].武汉:武汉理工大学,2014.
[2] 李一染,权龙.液压转向助力系统能耗特性的分析和比较[J].工程设计学报,2002,9(3):131-135.
[3] 宋海兵,江浩斌,唐斌,等.商用车转向系统的操控性与能耗分析及展望[J].武汉:武汉理工大学学报(信息与管理工程版),2015(10):580-584.
[4] 谭心,陈超,方桂花,等.汽车电动液压助力转向系统的仿真分析[J].液压与气动,2013,l(1):15-19.
[5] S.-S. Youa,Y.-H.Chai. Multi-objective control synthesis:an application to 4WS passenger vehicles[J].Mechatronics,1999:363-390.
[6] 裴学杰.电动助力转向系统助力特性研究[D].太原:中北大学,2015.
[7] 车明霞.EPS方向机机构的设计研发[D].武汉:武汉理工大学,2012.