消费级无人机的大比例尺测图能力分析
2018-07-03万剑华刘善伟冯建伟刘汝涛中国石油大学华东山东青岛266580
万剑华,王 朝,刘善伟,冯建伟,刘汝涛(中国石油大学(华东),山东 青岛 266580)
近年来,随着无人机技术的快速发展,无人机在航空摄影测量领域得到了广泛的应用[1-3]。专业型航空摄影测量无人机价格昂贵且飞行操控需专业培训,而消费级无人机价格较低、操控简单,配合航拍软件即可快速获取对地影像,若能达到专业型无人机的精度效果,对于小规模测绘将具有重要意义。
像控点布设是航空摄影测量中的重要环节,但是无人机的航高较低,采用相机多为非量测型,获取的影像存在像幅小、像片多、重叠率不规则和影像倾角过大等特点[4-6],因此地面像控点的分布和数量不能依据传统航空摄影测量的要求和经验。有学者利用DJI Phantom系列无人机开展1∶500大比例尺地形测图试验[7],但未阐述像控点数量及分布与成图能力之间的具体关系。
为了分析像控点数量与分布与消费级无人机摄影测量成果质量之间的关系,本文采用DJI INSPIRE 2四旋翼无人机开展测图试验,利用多视图三维重建方法生成对应数字正射影像图(digital orthophoto map,DOM)、数字地表模型(digital surface model,DSM),分析像控点数量、分布与空中三角测量精度、DOM平面精度、DSM高程精度之间的关系。
1 试验设备与相机标定
本文采用DJI INSPIRE 2四旋翼无人机,搭载禅思X5S云台相机搭配Panasonic Lumix 15 mm/1.7镜头,相机视场角,等效35 mm相机标准焦距,像素数5280×3956,像素尺寸3.278 97 μm。
在进行航测任务之前应对非量测相机进行高精度标定,确定相机的内方位元素和畸变参数,以消除相机成像过程中的误差,确定摄站的相对位置[8]。普通相机标定主要依据像点、投影中心、物方点三点共线,根据直接线性变换的方式计算初始值,再以自检校光束法平差的方式同时解算相机内方位元素和各畸变参数的最优值[9-10]。
如图1所示,S为投影中心,M为物方点,m为M的像点,其中SXYZ为像空间坐标系,xOy为像平面坐标系。M在地面坐标系、像空间坐标系中坐标分别为M(XG,YG,ZG)、M(XS,YS,ZS),m在像空间坐标系、像平面坐标系中的坐标分别为(xm,ym-f)、(xm,ym)。由物方点M、投影中心S及投影点m三点共线,故有
(1)
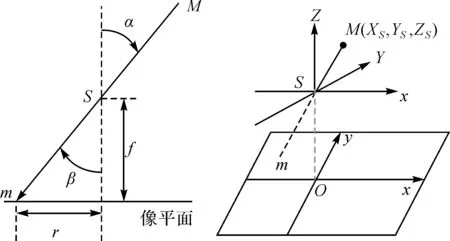
图1 普通相机成像模型
整理后得到
(2)
点M在像空间坐标系中的位置可由世界坐标系经转换得出,算出式(3),其中R和T分别为旋转矩阵、三维平移向量。
(3)
顾及像点畸变误差Δx,Δy的影像及主点坐标(x0,y0)的位置,式(2)可写为
(4)
畸变误差的算式为式(5),包含为消除镜头缺陷造成的径向畸变参数k1、k2、k3,光学系统中心与几何不一致造成的偏心畸变参数M1、M2。其中r为投影点到像主点的距离。
(5)
在已知一系列物点坐标及其对应的图像坐标的情况下,通过最小二乘迭代可求出相机的内方位元素及畸变参数,从而实现对相机的标定,相机标定参数见表1。

表1 相机标定参数 mm
2 试 验
2.1 试验区域及数据准备
试验区域为某城区山地公园,树木覆盖率50%以上,贯穿多条水泥路,南北为530 m,东西为730 m,高差为36 m。在试验区域内均匀布设40个黑白棋盘控制点(如图2所示),采用青岛CORS系统网络RTK进行控制点测量,定位精度优于1 cm[11]。
2.2 试验方案
试验区山顶高程约46 m处作为起降场地,设定航高90 m、航向重叠75%、旁向重叠65%,共24条航线,飞行时长50 min,获得有效航片682张,航片摄站位置如图3所示。
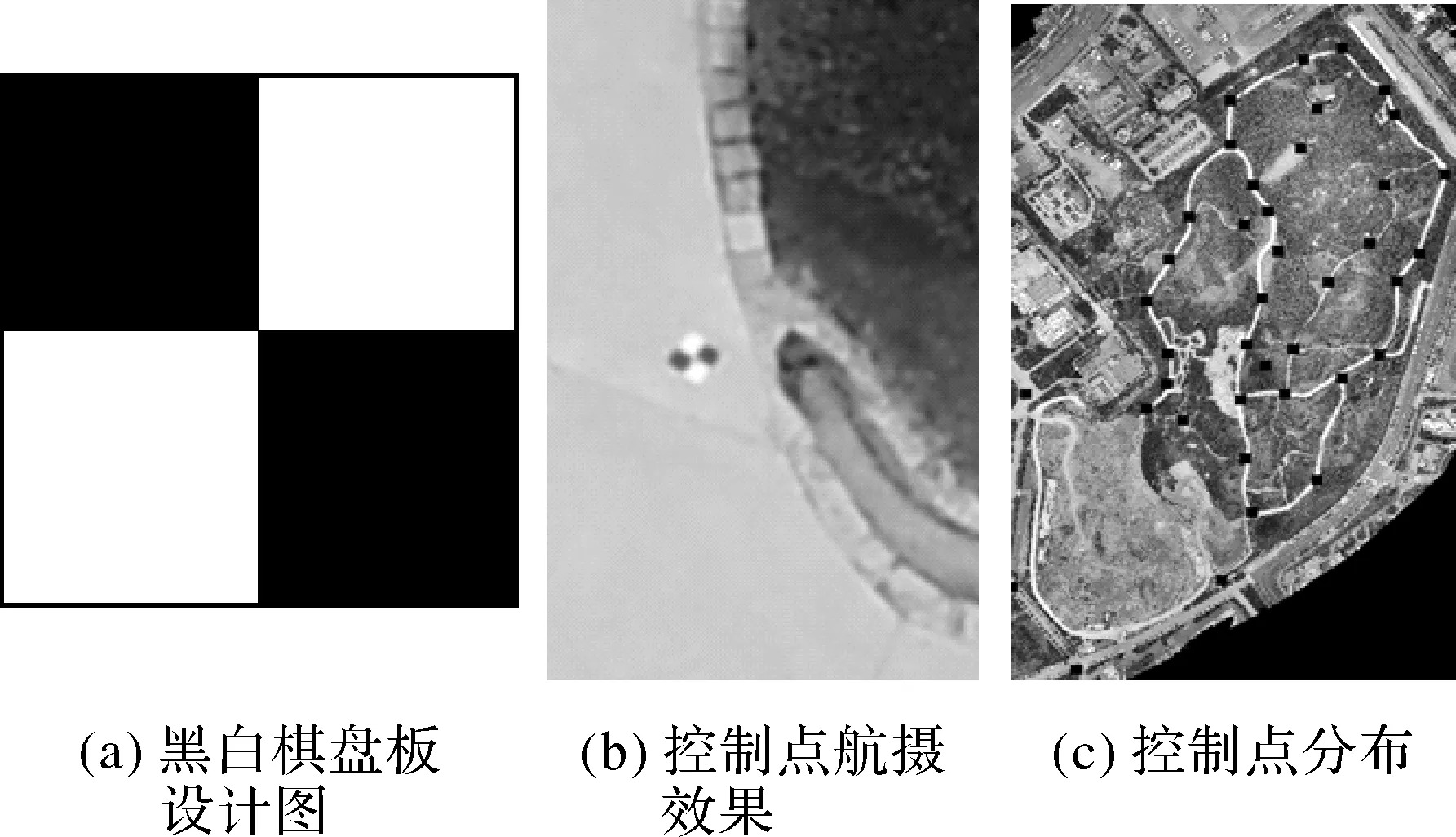
图2 控制点布设
按照多视图三维重建技术从重叠影像中估算出每张影像曝光瞬间相机的位置和匹配点形成的稀疏点云的相对位置[12-13]。从而生成核线影像,并逐点进行密集匹配,生成密集点云,最后对密集点云进行插值,得到目标区域的三维地形数据[14]。

图3 摄站点
为了验证像控点数量与成图精度之间的关系,分别选用6、9、12、16和24个控制点作为像控点进行绝对定向,采用上述点以外独立的12个控制点作为检查点分别对5个试验的结果进行精度评价,并检查各个试验绝对定向后的残差,试验流程如图4所示。检查点位置及各试验像控点位置如图5所示。
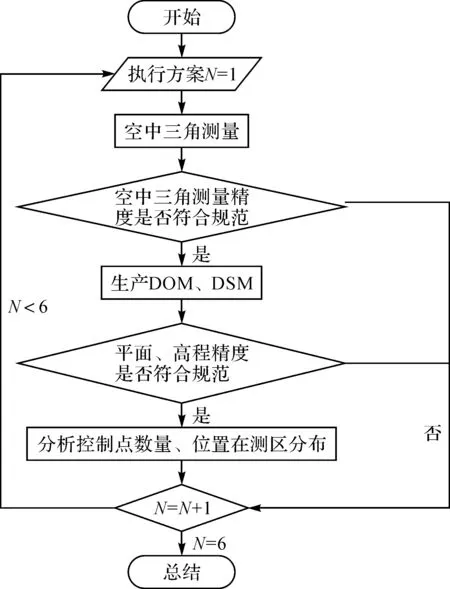
图4 试验流程
3 试验结果分析
3.1 精度评定标准
利用像控点和检查点对成果进行精度评定,分别按照空中三角测量精度评价、成果分辨率和成果测图精度评定的顺序对无人机获取的影像成果进行精度评价。绝对定向精度规范要求见表2。由于DSM后续可生成DEM,故DSM精度参考DEM相关规范要求,DOM分辨率及平面位置精度和DEM高程精度规范要求见表3。
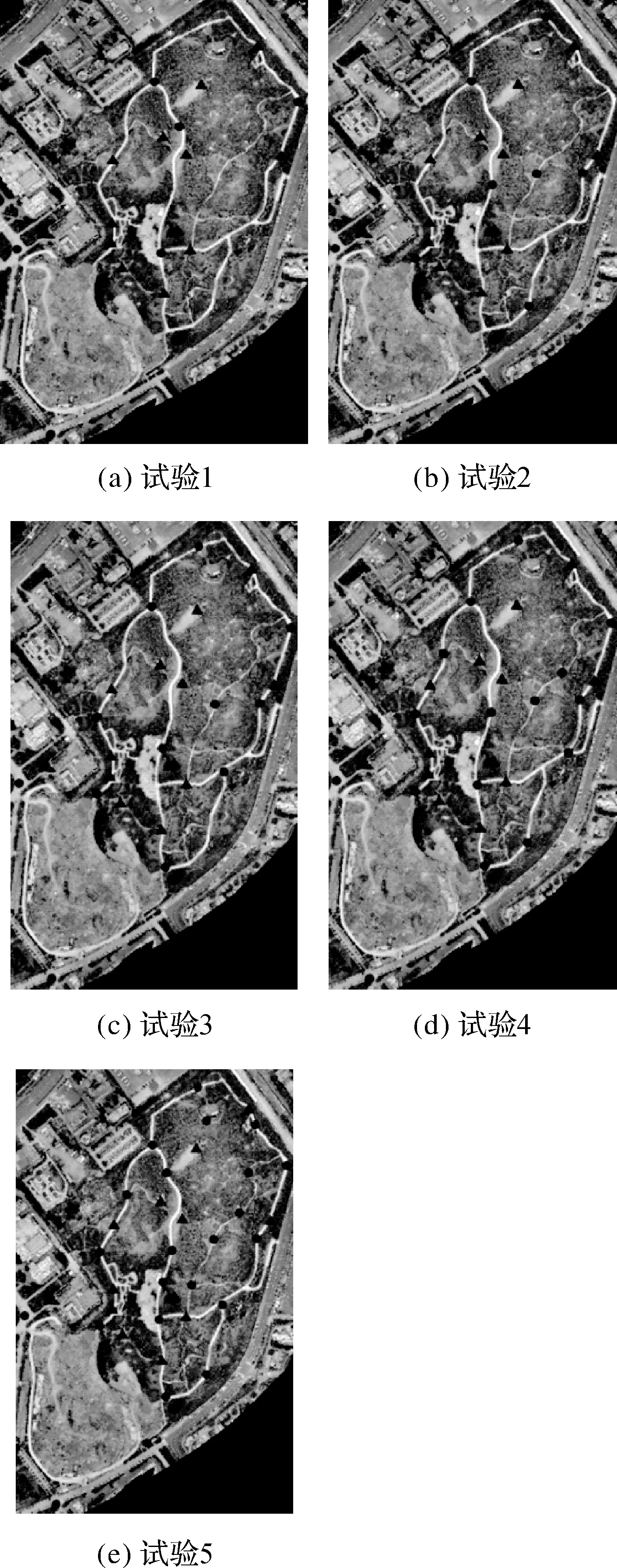
注:▲为检查点,●为像控点。
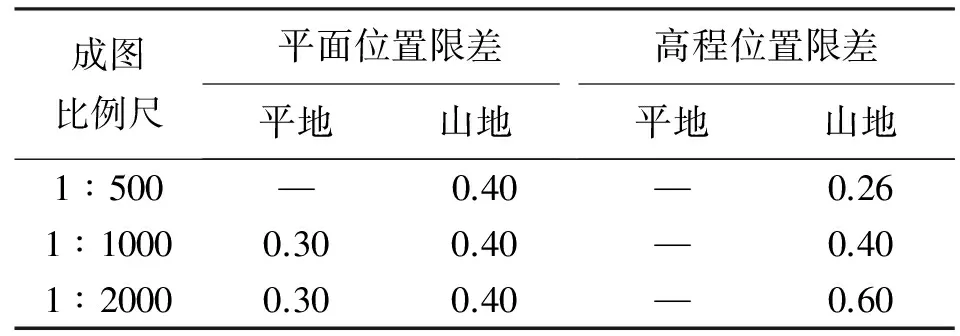
表2 绝对定向限差 m
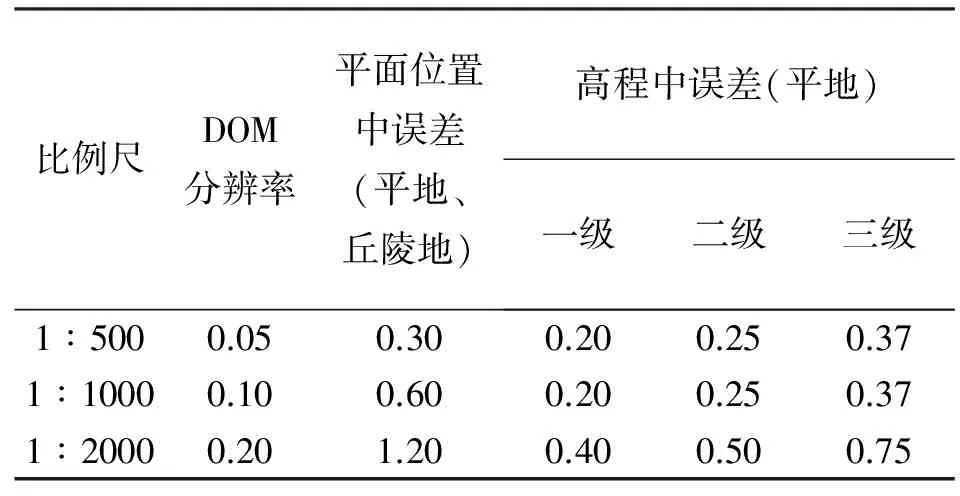
表3 基础地理信息数字成果标准 m
3.2 空中三角测量精度分析
(6)
多个检查点的均方根误差则为
(7)
式中,di为平面距离误差距离dpi或高程误差距离dEi。
根据式(6)和式(7),结合各个试验的像控点,检查其中DOM和DSM模型上对应点,计算各个试验的空中三角测量精度,如表4所示。
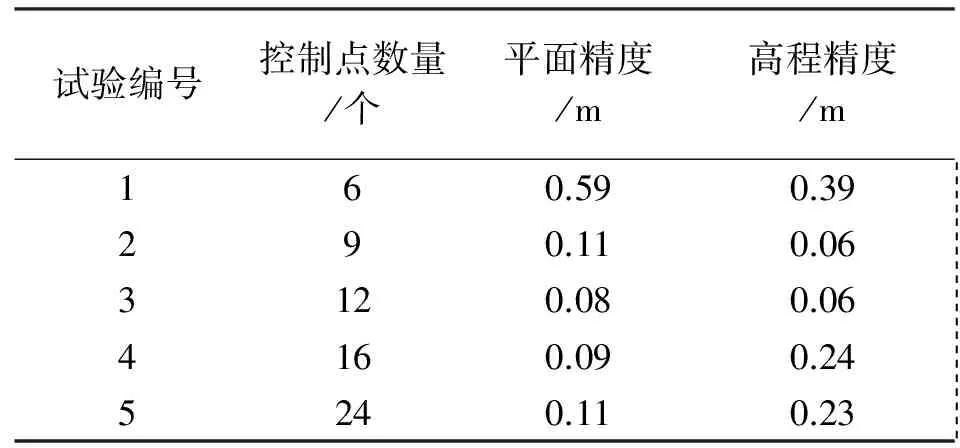
表4 空中三角测量精度统计
从表4可看出除试验1外,其他4个试验的平面中误差和高程中误差的精度均满足1∶500、1∶1000和1∶2000比例尺低空数字航空摄影测量内业规范中测图精度的要求。
3.3 DOM和DSM成果精度分析
试验5生成的DOM和DSM如图6所示。
本次试验得到DSM格网为0.21 m分辨率,故DSM的格网分辨率满足成1∶500、1∶1000和1∶2000比例尺DEM的需要,DOM影像分辨率可满足1∶500、1∶1000和1∶2000比例尺成图分辨率的需要。以检查点坐标作为真值评价无人机影像生成的DOM和DSM数据精度,并计算5个试验的均方根误差,计算结果见表5。

图6 数据成果
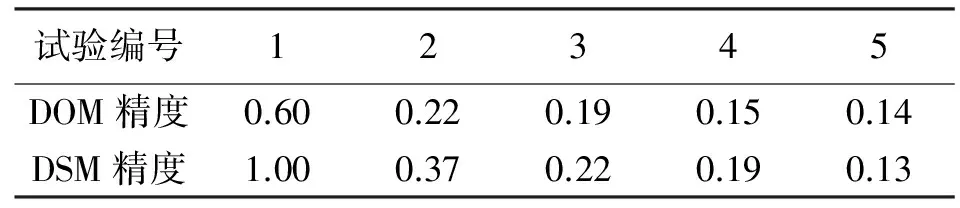
表5 不同试验DOM和DSM精度统计 m
由表6可以看出,试验1生成的DOM精度有所欠缺,不能满足规范要求,试验2—5生成的DOM精度均满足1∶500、1∶1000和1∶2000数字正射影像图的要求。
参照数字高程模型一级“平地”要求,则试验1生成的DSM高程精度不能达到1∶500、1∶1000和1∶2000数字高程模型的要求,试验2生成的DSM高程精度不满足1∶500、1∶1000数字高程模型的要求,但是满足1∶2000数字高程模型的要求。试验3、4和5生成的DSM高程精度均能达到1∶500、1∶1000和1∶2000数字高程模型的要求。
试验2、3像控点分布如图7所示,根据图7可分析处像控点在航线中分布位置及形状。试验2中像控点在航线中可看作呈现“V”字形分布,航线中心有3个点;试验3中像控点在航线中可看作呈现“H”形,航线两侧各均匀分布8个像控点,中间在每4个像控点中间均一个点,构成“H”形。
4 结 语
通过本次试验,首先验证了消费级无人机成大比例尺图的可能性,其次试验采用不同的控制点数量,生成DOM和DSM,分析消费级无人机在小区域的空三测量精度、DOM和DSM精度与像控点数量及分布之间的关系,为消费级无人机在航空摄影测量中为满足成图需求,采用多少像控点及像控点在测区的分布,提供有效参考。结论如下:
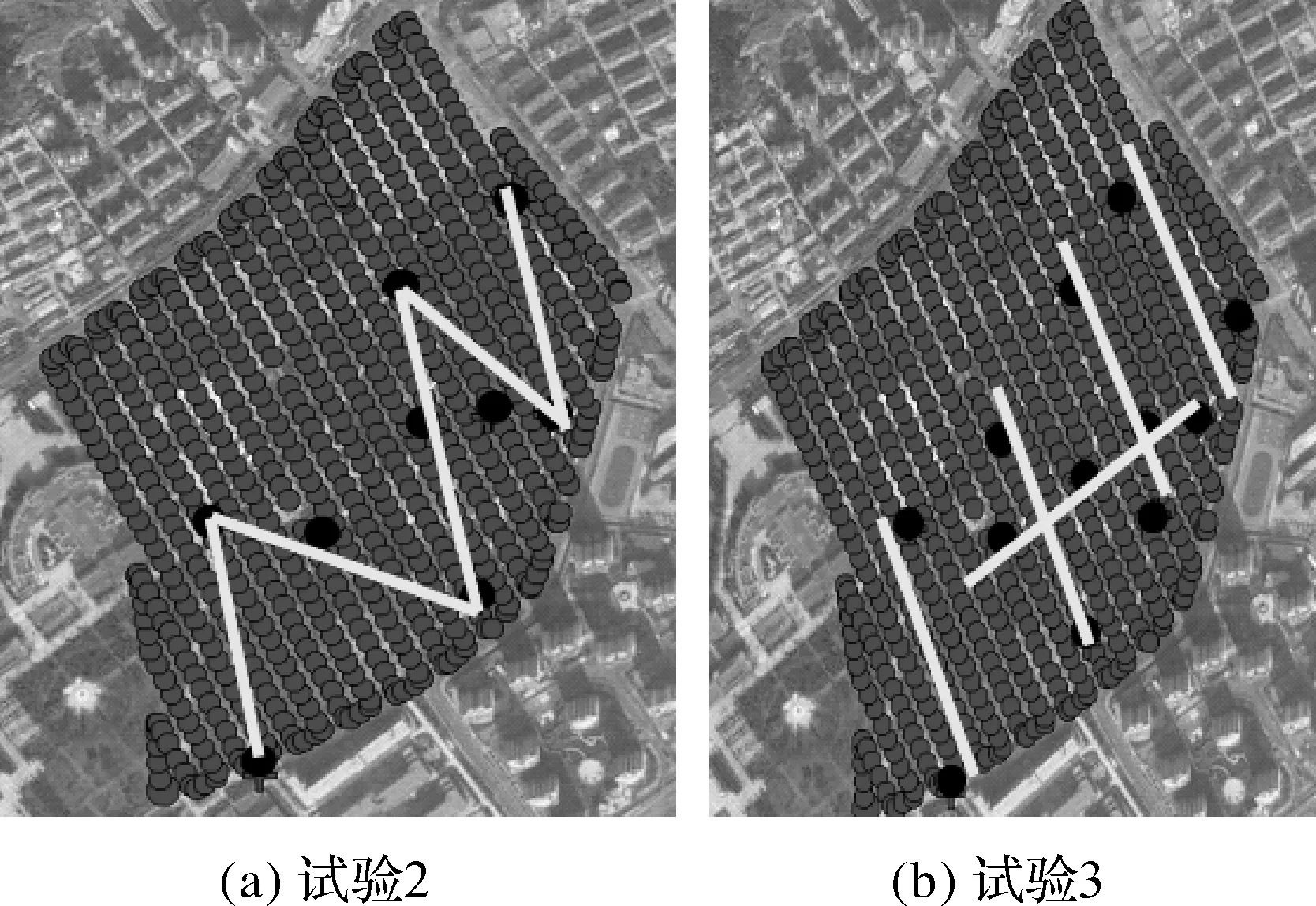
图7 像控点抽象分布
(1) 先对相机进行标定,并用标定参数对相片进行纠正。消费级无人机生成1∶500、1∶1000、1∶2000比例尺DOM和DSM的精度满足基础地理信息数字成果的要求。
(2) 在规定相邻地面控制点的航线跨度内,航线两头合适位置各有两控制点,在这4个地面控制点构成的范围内有一个地面控制点,这5个地面控制点构成“H”形,若干“H”控制点分布均匀覆盖测区作为像控点时空中三角测量精度、DOM平面精度和DSM高程精度可达到测图要求。
参考文献:
[1] 葛洪涛.基于倾斜影像的正射影像生成方法研究[J].测绘与空间地理信息,2016,39(1):200-203.
[2] 冯圣峰.无人机正射影像无缝拼接的研究[D].南昌:东华理工大学,2013.
[3] 张强.小型测绘无人机遥感系统关键技术的研究[D].郑州:信息工程大学,2014.
[4] 毕凯,李英成,丁晓波,等.轻小型无人机航摄技术现状及发展趋势[J].测绘通报,2015(3):27-31,48.
[5] 刘淑慧.无人机正射影像图的制作[D].南昌:东华理工大学,2013.
[6] 王家杰.无人机低空摄影测量系统研究[D].哈尔滨:哈尔滨工业大学,2016.
[7] 孔振,刘召芹,高云军,等.消费级无人机在大比例尺测图中应用与精度评价[J].测绘工程,2016,25(12):55-60.
[8] 田雷,马然.无人机非量测相机检校方法研究[J].测绘通报,2016(7):81-83.
[9] 崔红霞,孙杰,林宗坚,等.非量测数码相机的畸变差检测研究[J].测绘科学,2005,30(1):105-107.
[10] 冯文灏,近景摄影测量:物体外形与运动状态的摄影法测定[M].武汉:武汉大学出版社,2002:202-207.
[11] 赵亮,叶世榕,王建.基于青岛CORS系统下的实验场地的精度分析[C]//第四届中国卫星导航学术年会论文集.[S.l.]:[s.n.],2013.
[12] WESTOBY M J,BRASINGTON J,GLASSER N F,et al.‘Structure-from-motion’ Photogrammetry:A Low-cost,Effective Tool for Geoscience Applications[J].Geomorph-ology,2012,179:300-314.
[13] SNAVELY N,SEITZ S M,SZELISKI R.Photo Tourism:Exploring Photo Collections in 3D[J].ACM Transactions on Graphics,2006,25(3):835-46.
[14] 明国辉,委民正.SURF算法在无人机倾斜摄影测量三维建模中的应用[J].测绘工程,2017,26(9):41-45.
[15] 张祖勋,张剑清.数字摄影测量学[M].2版.武汉:武汉大学出版社,2012:65-67.