4HT-2花生条铺收获机的研制与试验
2018-07-03田连祥尚书旗王东伟申世龙
田连祥,尚书旗,王东伟, 申世龙
(青岛农业大学 机电工程学院,山东 青岛 266109)
0 引言
花生是我国广泛种植的油料作物和重要的出口创汇农产品[1]。我国花生的种植历史悠久,地域广阔,种植面积占世界面积的20%,居世界第二位[2]。花生种植区域主要集中在河南、山东、安徽、河北、辽宁、江苏及广东等省份。我国花生种植面积虽广,但是还普遍存在着收获难及收获方式杂乱等问题[5]。就目前我国的总体生产状况来看,花生收获主要依靠人工完成,劳动强度大、作业成本高、效率低、损失大已成为花生生产与发展的主要瓶颈[9]。而花生的收获环节是花生生产过程中用工量最大也是作业成本最高的作业环节,其成本所占比例超过50%[9]。而且,花生收获一般在雨季,难免会遇到暴雨等恶劣天气,如果收获不及时,花生就会在土壤中腐烂,对花生的产量造成严重影响。虽然部分地区已经引进了花生收获机械,但大部分收获机械的适应性较差,收获效率不高。
针对花生收获过程中可能遇到的这些问题及现有花生收获机械适应性差、收获效率不高的情况,设计了一种新型的花生条铺收获机。其能够依次实现花生的挖掘拔取、夹持输送、抖土去土及有序条铺等作业,提高了收获效率和收获质量,大大减小了劳动强度和劳动投入,从而减轻农民负担,增加农民的收益,实现高效增产。
1 总体方案的确定
1.1 总体结构
该花生收获机械配套动力为16kW以上的四轮拖拉机,可一次性实现花生的挖掘拔取、夹持输送及有序条铺等工序,并能实现双行作业。本机主要由挖掘装置、夹持输送装置、碎土装置和有序铺放装置等部分组成,如图1所示。
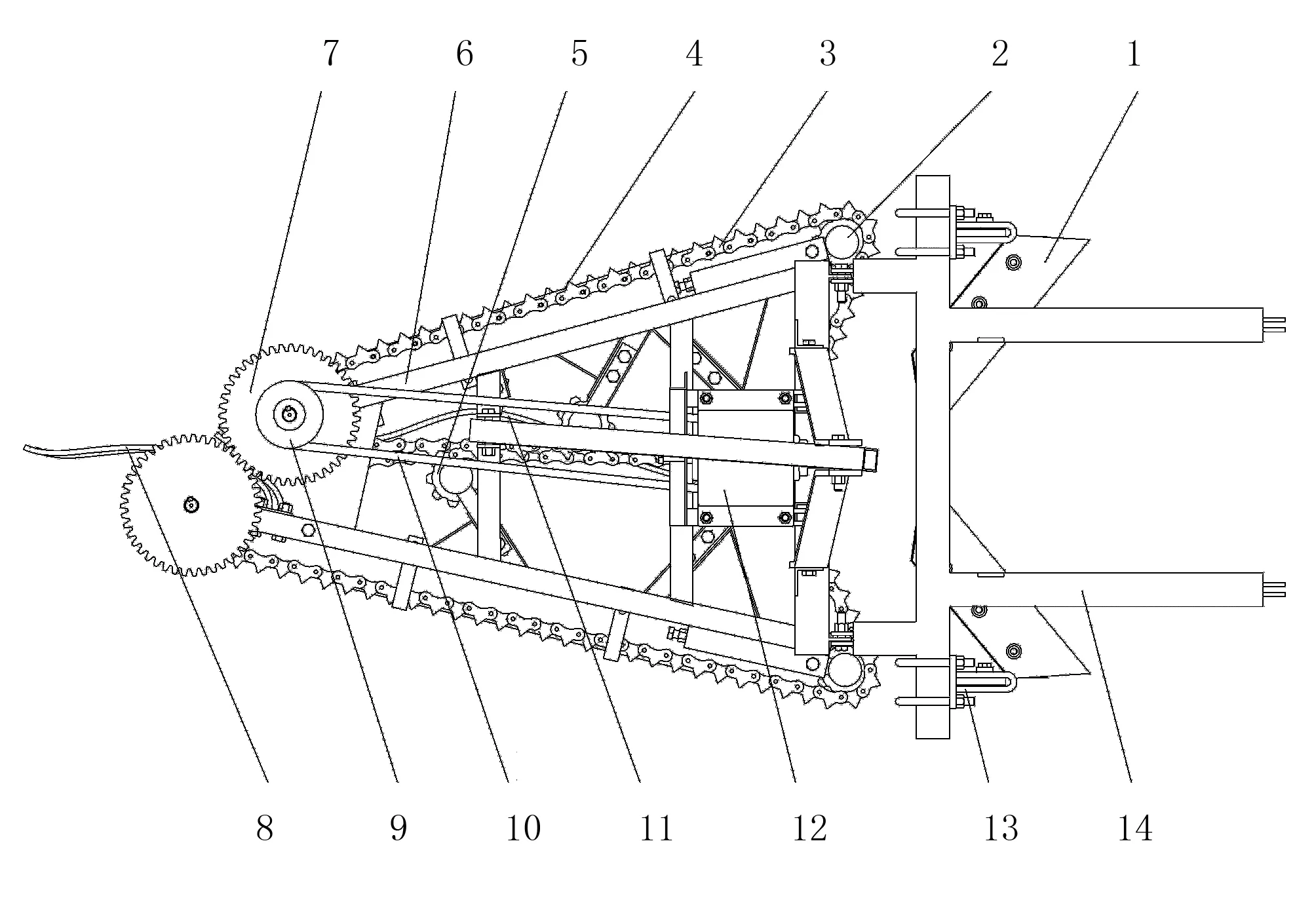
1.挖掘铲 2.夹持链轮 3.夹持链 4.夹持链张紧杆 5.张紧链轮 6.机架 7.传动齿轮 8.有序条铺杆 9.皮带轮 10.皮带 11.正弦线去土杆 12.变速箱 13.限深装置 14.悬挂架
1.2 工作原理
作业时,机具在拖拉机的牵引下前行,挖掘铲在下地作业之前进行了安装调节,使其能够以一定的入土角度(一般为20°)和入土深度入土。拖拉机的动力通过动力输出轴传输到变速箱上,进行变速、动力换向,然后经皮带传输到皮带轮,皮带轮与其中一个传动齿轮相连,传动齿轮通过与其相啮合的另一个传动齿轮将动力输送至齿形夹持链;挖掘铲将花生从土壤中挖掘出的同时,植株被齿形链夹持进入夹持输送装置,由齿形链夹持花生植株输送到收获机尾部;在夹持输送过程中,花生受到拍土杆的阻挡拍打作用,将粘附在花生荚果上的大部分泥土清除掉;花生秧果被输送到机器尾部后,在有序条铺导向装置的作用下以同一方向按条状有序铺放于田间。
1.3 主要技术参数
主要技术参数如表1所示。
2 主要工作部件的设计
2.1 挖掘装置
花生挖掘是花生收获作业的第一步,也是花生收获过程最为重要的一步,挖掘效果的好坏会对收获效果带来直接的影响,挖掘装置作为完成这一作业环节的功能部件,是花生条铺收获机的关键部件。挖掘铲是挖掘装置的重要组成部分,符合收获标准的挖掘铲要具有良好的入土性能,并能迅速地铲断花生根系和松碎土壤,在保证所有作物被铲起和挖净的同时做到不铲果。同时,挖掘铲需要对作物施加一个提升力,使其能够顺利进入夹持输送的作业环节。挖掘装置的结构图如图2所示。
结合花生的生长特性与种植模式,本机具采用的是平面双铲结构,左右双铲通过挖掘铲连接架固定在机架上,其挖掘深度与铲间间距可以通过限位阀进行调节,入土角度可以通过改变平面铲与挖掘铲连接架的弧形槽连接位置进行调节。
入土角α和铲刃翼张角γ的大小是直接影响挖掘铲性能的两个因素。分析挖掘铲的受力情况,如图3所示。
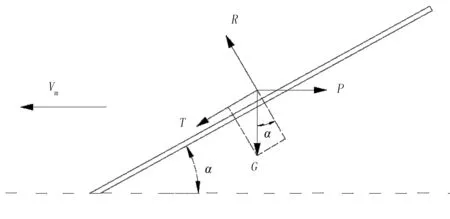
图3 铲面受力分析
为了使挖掘铲给予花生植株一个向上托起的力并且保证铲面铲起的土壤能够顺利往铲后移动,挖掘铲面掘起土壤的力P应满足以下条件[4],即
Pcosα-T-Gsinα≥0
(1)
R-Gcosα-Psinα=0
(2)
T=Rμ
(3)
式中P—铲面掘起土壤所需的力(N);
R—铲对土壤的反作用力(N);
T—铲面对土壤的摩擦力(N);
G—铲面所承受的土壤的重力(N);
α—挖掘铲的入土角(°);
μ—土壤对铲的摩擦因数,μ=tanφ,φ为土壤与铲面的摩擦角(°)。
将式(2)、式(3)代入式(1)整理可得
P≥Gtan(α+φ)
(4)
由式(4)可知:作用于挖掘铲面上的力与入土角 的大小呈正相关关系,但在不同的角度区间内其变化率不尽相同。当入土角α位于0°~25°之间时,作用于铲面上的力随α的增大而增大,但是变化情况不明显;当α超过25°后,作用于铲面上的力会随着入土角α的增大急剧增大。因此,取α<25°为宜[5]。本机具确定α<20°,满足要求。
挖掘铲工作时切断花生根蔓的能力主要取决于铲刃翼张角γ[6]。γ过大时,根蔓易缠结铲片;γ过小时,根蔓则不易被切断且会发生滑脱现象。因此,铲刃翼张角γ过大或过小都不利于挖掘作业的正常开展。当铲刃翼张角在适宜的角度区间内变化时,翼张角γ越小,滑切性能越好;但铲片长度也会同时增大,使整机纵向尺寸变大,与整机的轻简化设计理念不符。为确保挖掘铲有良好的挖掘性能,铲刃翼张角需满足以下条件
γ<90°-φ
(5)
其中,φ为土壤与挖掘铲表面的摩擦角。
由于土壤对钢的摩擦因数tanφ=0.4~0.8,所以γ<55.1°。田间试验得出,取γ=48°时,可靠滑切来铲断花生根系,且可有效减少阻力和壅土[7-8]。挖掘铲配置图如图4所示。
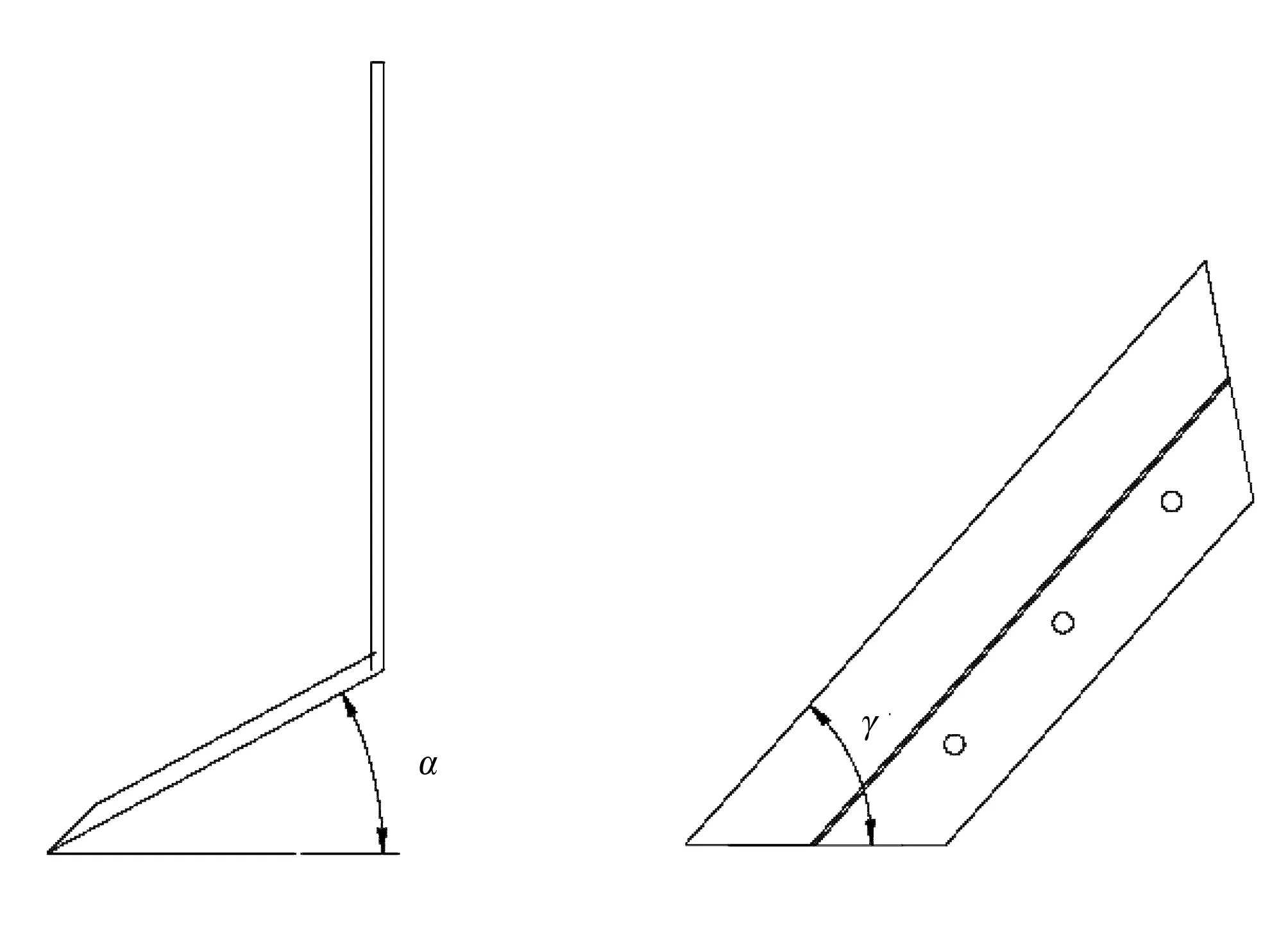
图4 挖掘铲结构图
2.2 夹持输送装置
夹持输送装置是机具进行有序条铺收获作业的重要装置,主要由夹持链、夹持链轮及张紧链轮组成。它的作用是确保花生植株在挖掘出土之后能够被其夹持拔起并向后有序运送到机器后端,其结构如图5(b)所示。
机器在田间作业时,夹持输送装置与地面会有一定的倾角[7],为保证其良好的夹持效果,倾角β可由式(6)确定。有
(6)
式中β—机具作业夹角;
H—植株高度;

θ—齿形链夹持角;
L—夹持作业幅长。
其中,花生的植株高度H一般为400~480mm,λ=0.33~0.50,夹持夹角θ的取值范围为80°~90°,L取620~650mm。代入式(6)中可知,β取25°合适。
夹持输送装置在输送花生植株时,既要考虑到夹持链输送速度Vj过小与机具前进速度Vm不匹配造成输送装置堵塞,进而导致作业故障增加的问题,又要考虑到输送速度Vj过大使花生秧果与拍土杆碰撞剧烈,导致拍土效果不佳及掉果率严重的问题。因此,合理确定夹持输送装置的运动参数尤为重要。对夹持输送装置进行速度分解[10],如图6所示。
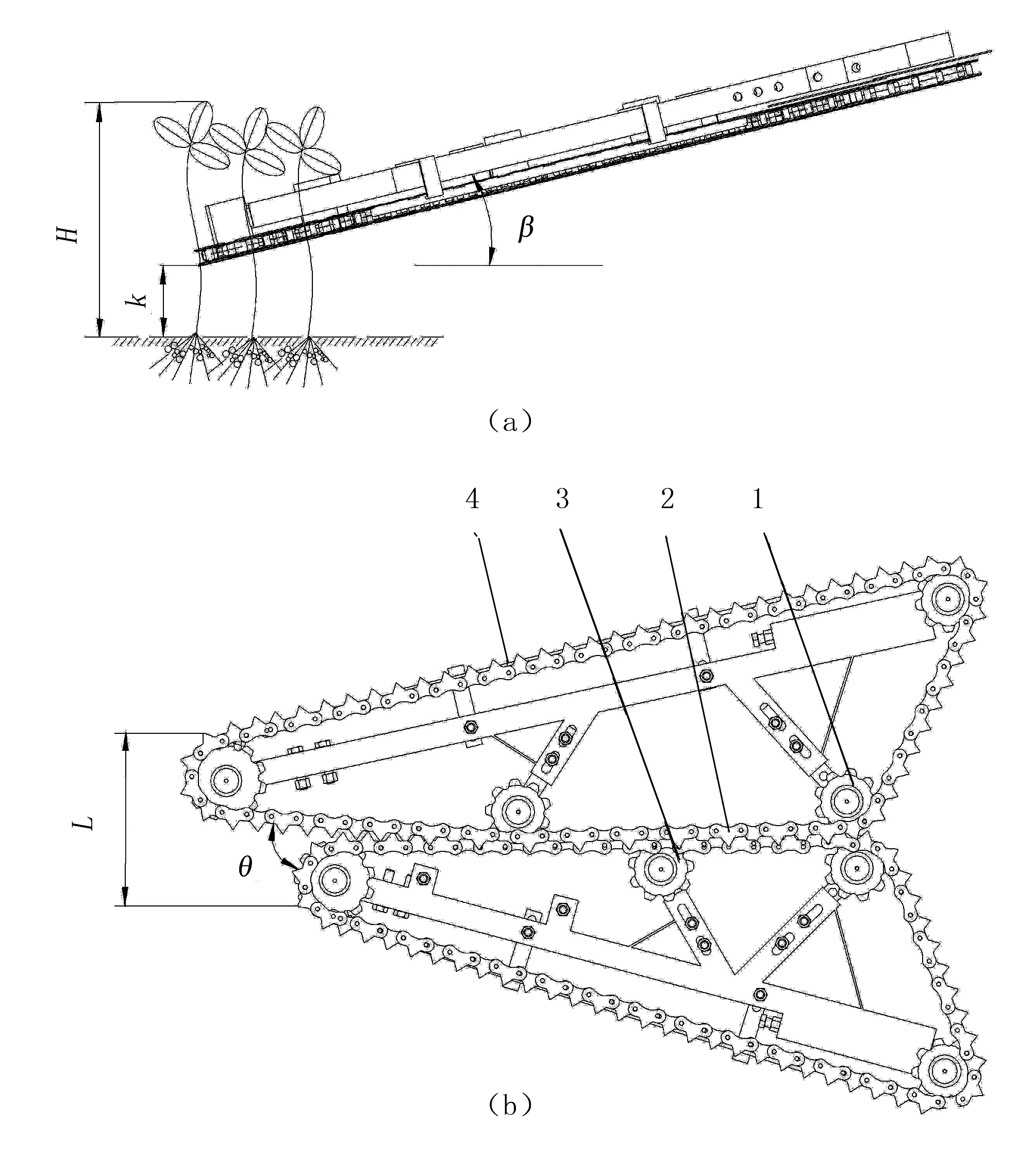
1.夹持链轮 2.夹持链 3.张紧链轮 4.夹持链张紧杆
图6 夹持输送速度分解图
由速度分解图可知
(7)

由速度分解图可知
bc=Vjsin(ψ-β)=Vmsinψ
(8)
2.3 拍土装置
挖掘装置将花生植株挖掘出土后,一般会有大量泥土黏附在花生根系上,这样的植株被输送到机具后端抛出后很难实现有序铺放[8]。因此,机具的去土效果成为决定花生有序条铺质量的关键因素。为了实现较好地去土效果,提高有序条铺质量,本机研制了正弦线型拍土杆。正弦线型拍土杆外观弯曲呈正弦线型,拍土杆的总长为850mm,有两个波峰,其有效拍打去土长度为710mm。在由夹持输送装置输送到有序条铺装置过程中,拍土装置对花生拍打去土2次,通过花生植株与正弦线型拍土杆波峰的撞击震荡使土块破碎脱落,可以有效去除粘附在花生植株根系上的泥土。拍土装置的结构如图7所示。
图7 拍土杆结构图
2.4 有序条铺装置
传统的花生挖掘机已经可以实现挖掘、去土等作业过程,这类花生收获机结构简单,但是收获后的花生铺放杂乱,为后续的花生捡拾收获带来不必要的麻烦,严重影响花生收获的效率与质量。为了解决上述花生收获难题,本机设计采用了简单有效的花生有序条铺装置,如图8所示。该有序条铺装置分为两部分,分别装备在机架侧部尾端的相对位置,利用花生夹持输送装置对花生植株的后抛惯性,模拟花生植株整体铺放动作,对花生的铺放轨迹与铺放方向进行有序引导,既可以达到良好的铺放效果,又能够降低花生条铺收获机的制造成本。

图8 条铺导向装置结构图
3 田间性能试验
3.1 试验地点
本文设计的4HT-2型花生条铺收获机由青岛明鸿农业机械有限公司试制生产,并选取山东平度市店子镇的代表性地块进行花生田间收获试验。用于试验的花生品种为海花1号,种植模式为垄作,花生植株平均高度为380mm,铺放宽度为140mm,株距为150mm;花生荚果深度区间为60~100mm,荚果直径为145~180mm,荚果产量为2 352.3g/m2;试验土壤类型为壤土,平均作业速度为4.44km/h。
3.2 试验方法
试验设置单个试验区域的长度为20m,随机选取3个试验区域进行重复试验[7]。收获试验结束,先后对泥土未除净的花生植株及人工除净泥土后的花生植株进行称量并作记录;捡拾各试验区收获过程中脱落的花生称量并做记录;挑选收获过程中破碎的花生称量并作记录[4]。
3.3 试验结果
该机具试验过程中,运行流畅,操作简单、方便,性能可靠稳定,各项性能指标如图9、表2所示。

图9 条铺机田间试验效果
项目埋果率/%破碎率/%含土率/%生产率/hm2·h-1技术要求≤2.0≤1.0≤200.15~0.30检测结果0.230.8212.20.36
由表2的数据可以看到,收获机的性能指标达到了相关设计要求与设计标准。
4 结论
1)采用夹持有序铺放机械化技术,可一次性完成花生的挖掘、输送、去土及有序铺放等作业过程,实现花生的有序条铺收获,利于花生荚果的晾晒,为下一阶段花生的捡拾摘果做准备。
2)采用的平面双铲结构简单,制造方便,成本低廉,入土性能好,能较好地避免缠草和壅土现象的发生。
3)设计的链式夹持输送装置,在挖掘装置进行松土切根作业之后,模拟手工拔持动作,对花生植株进行拔取和夹持输送作业,实现果土分离的柔性化,夹持输送效果好,机械损伤落果少。
4)设计的正弦线形拍土装置与有序条铺装置结构简单,具有便于制造、无动力消耗、生产与使用成本低、震荡拍打去土效果好,以及植株田间铺放整齐等特点,省去后续的人工抖土与规整环节,可有效节省人力投入。
5)整机性能可靠,投资成本低,生产效率高,作业损失小,方便灵活,推广适用性强。
参考文献:
[1] 吕小莲,王海鸥,张会娟,等.国内花生机械化收获的现状与研究[J].农机化研究,2012,34(6):245-248.
[2] 张智猛,胡文广,许婷婷,等.中国花生生产的发展与优势分析[J].花生学报,2005(3):6-10,20.
[3] 胡志超,王海鸥,彭宝良,等.国内外花生收获机械化现状与发展[J].中国农机化,2006(5):40-43.
[4] 陈书法,李耀明,孙星钊.花生联合收获机挖掘装置的设计研究[J].中国农机化,2005(1):47-49.
[5] 蔡佳麟,姚华平,陈东桂,等.南方花生挖掘铲结构参数的分析与计算[J].农业技术与装备,2012(13):9-11.
[6] 郑玉才,陈芳,刘长荣,等.简易花生收获机的设计[J].农机化研究,2007(10):77-79.
[7] 尚书旗,李国莹,杨然兵,等.4HQL-2型全喂入花生联合收获机的研制[J].农业工程学报,2009(6):125-130.
[8] 赵思静,王东伟,王延耀,等.有序铺放花生收获机的研制[J].农机化研究,2013,35(10):73-75,79.
[9] 滕美茹,田立忠,陈广成.花生收获机的现状与展望[J].农机化研究,2011,33(10):211-215.
[10] 赵塞良,荣长发,许惠康.农机夹持链性能参数的分析[J].机械传动,2005(1):54-55,74.
