基于K-means算法的地铁站台异物检测
2018-06-28雷焕宇刘伟铭
雷焕宇,刘伟铭
(华南理工大学土木与交通学院,广东 广州 510641)
0 引 言
随着我国城市轨道交通的不断发展,暴露出来与之相关安全问题也越来越多。地铁站台屏蔽门与列车门之间存在一定距离的间隙,该间隙存在夹人夹物而造成运营安全事故的风险[1]。例如2014年北京地铁五号线上,因列车启动时,乘客被夹在列车门与站台屏蔽门之间,最终不幸身亡;2014年南京地铁发生空隙夹人事件,乘客被地铁保安救助无伤亡;2010年上海地铁二号线上,一位女乘客在灯闪铃响的情况下抢入而被夹并最终造成死亡。因此,地铁列车与站台屏蔽门间空隙存在巨大的安全隐患。目前为了消除该隐患,地铁公司要求列车司机在车头瞭望车尾灯带的完整性来排除空隙夹人夹物的风险。然而,这种判断方式不仅效率低下,而且准确率低,还易造成司机视觉疲劳。因此,借助其他的技术辅助司机完成开车前空隙异物自动检测已成为地铁运营中的研究热点。
目前随着计算机技术和先进的传感器技术的不断进步,目标识别和检测技术[2-6]的准确性和可靠性也在不断提高。对于智能交通领域,许多先进的技术被应用于实际生活中[4-10]。在地铁站台异物检测方面,主要是通过在屏蔽门与列车门之间设置障碍物探测装置。王瑞峰等[6]通过间隙安置红外光幕的方式来检测空间异物;黎卓虹等[7]通过采用激光探测方案检测空间异物;黄华文等[8]利用图像处理技术来检测直线站台车门与屏蔽门间的夹人夹物情况;吴卫海等[9]则通过在滑动门下方安装蓝色灯带做参考物来完成曲线型站台车门与屏蔽门间异物检测;谭飞刚等[10]采用机器视觉的方法来进行地下地铁的屏蔽门与列车门间障碍物的检测。虽然已经有部分学者对地铁屏蔽门与列车门之间的异物检测进行了研究,然而上述的研究主要是基于地下环境下的,而针对户外地铁站台的研究相对较少。目前在香港和国内某些地区,城市轨道部分建在户外,户外的站台环境相对于地下,外界光线的剧烈变化对图像数据的采集造成很大的干扰。本文在查看相关研究文献[11-18]的基础上,提出一种基于K-means的方法来判断屏蔽门与列车门之间是否含有异物,该算法通过构造人工光学背景,首先进行图像预处理,然后利用无监督的K-means聚类方法,自适应阈值将图像二值化,通过灯带完整信息来判断是否含有空间异物。
1 人工构建鲜明背景
1.1 地铁户外站台环境
目前地铁大部分建立在地下,由于地下隧道强风压的作用,屏蔽门大多采用全封闭式安装,在屏蔽门完全开启前,站台区和轨行区通过屏蔽门完全隔开,因此当列车在站时,列车与屏蔽门之间的间隙大多处于光线较暗的状态,此时通过车头瞭望车尾处灯带,干扰较少,便于判断是否夹人夹物。而除了地下轨道,由于规划和实际环境的原因,部分地铁站台建立在地面上,外界环境对异物检测的影响较大,尤其是外界光线的变化剧烈。如图1所示,户外站台的屏蔽门大多不是全封闭式的,而是采用半人高的滑动门,当司机瞭望列车门和屏蔽门间隙时,由于全视野观察,极容易受到外部的声音和光线干扰,降低了司机的注意力,诱发异物或者行人被夹漏检的风险。如图2所示,本文通过在车头上下架设双摄像头拍摄车尾,从而判断间隙是否含有空间异物,由于外界光线的变化,尤其是白天和晚上,阴天和晴天,有太阳直射和无太阳直射,所呈现的光学背景是不同的,因此需采用人工构建光学背景的办法提高检测精度。

图1 户外地铁环境图
1.2 人工构建光学背景
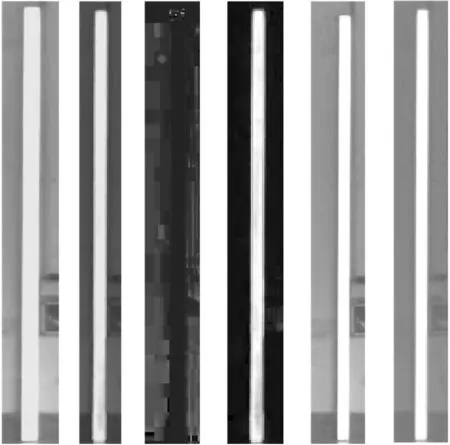
由于外界光线的变化,无法通过摄像头拍摄现有的自然背景来判断间隙是否含有异物,故本文采用在车尾处人工安装发光的条形发光灯带。如图2所示,该灯带可发出单色暖色系光线,既不会刺激行人,易于接受,又能够给司机观察提供可参照的背景,降低司机的疲劳感,并且维护简单且能连续发光,完全兼容现有人工检测和视频自动检测,可明显提高异物检测的准确率。由于白天和晚上,外界光强的变化,使得灯带呈现的光学背景并不完全一致,故采用基于颜色空间的预处理,提高检测算法的鲁棒性。
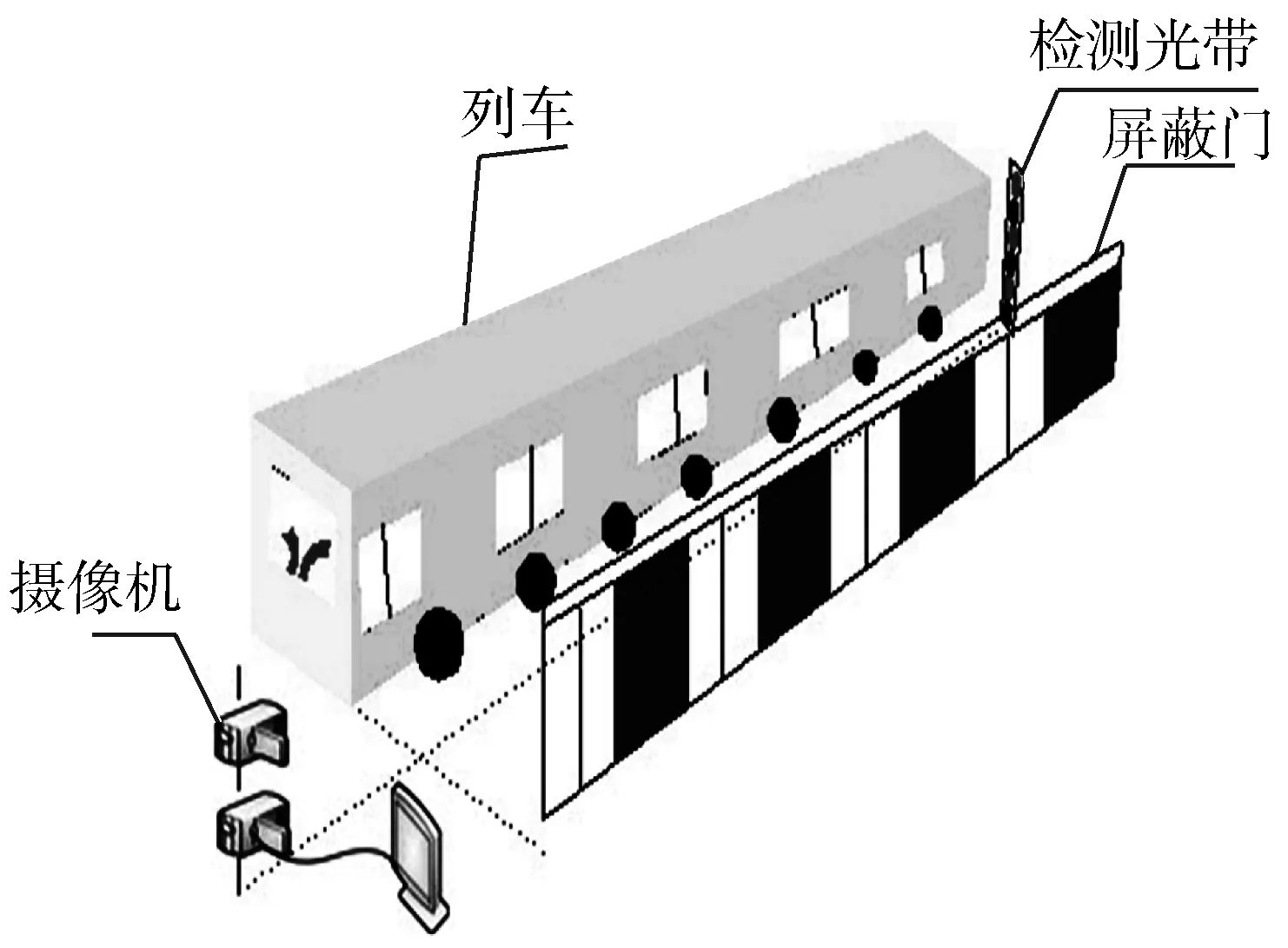
图2 安装示意图及人工光学背景
2 基于图像颜色空间的预处理
研究表明,人眼对颜色的感知是三维的,利用颜色特征来进行图像的检索是比较符合人眼观察的视觉特性的。图像的颜色特征不仅取决于图像本身,而且还与观察者的视觉系统和观察经验有关。对彩色图像颜色特征提取的研究,必须在特定的颜色空间中进行。常用到的颜色空间很多,比如RGB空间、HSV空间、YUV空间等。在实际应用中,大部分摄像头采集的图像是RGB空间图像,需要根据具体情况转化为合适的颜色空间,其中因为HSV空间对光线具有更强的鲁棒性,因此本文需要将RGB空间转化为HSV空间。
HSV(Hue, Saturation, Value)是根据颜色的直观特性由A.R.Smith在1978年创建的一种颜色空间,即六角锥体模型(Hexcone Model)。因大部分图像采集设备都是基于RGB空间,其取值范围为[0,255],故假设(r,g,b)分别是一个颜色的红、绿和蓝坐标,它们的值是0~255的实数。设zmax=max (r,g,b),zmin=min (r,g,b)。要将其转化为HSV空间中的(h,s,v)值,h∈[0,360)是角度的色相角,而s,v∈[0,1]是饱和度和亮度,计算公式为:
(1)
(2)
(3)
由于HSV模型可以只用反映色彩本质特性的色度、饱和度来进行各种颜色的聚类,将亮度信息和灰度信息从色彩中提取出去,从而去掉光照的影响,将颜色和亮度分开处理,使程序具有更强的鲁棒性,比RGB模型具有更好的识别效果。色度和饱和度属性能比较准确地反映颜色种类,对外界光照条件的变化敏感程度低。
(a) RGB (b) HSV (c) H通道 (d) S通道 (e) V通道 (f) 合成效果
通过车首放置的摄像头可以完整地拍摄列车门与屏蔽门整个间隙,盲区少。由于外界光线的变化对采集图像数据的干扰,本文通过将RGB颜色空间转化为HSV颜色空间,再进行比例融合,从而合成新的能提取灯带边缘的颜色通道。如图3所示,其中图3(a)表示原RGB三通道合成图,图3(b)表示转化后的HSV三通道合成图,图3(c)表示只提取H通道的单通道图,图3(d)表示只有S通道的单通道图,图3(e)表示只有V通道的单通道图,图3中可以看出,H通道含有大量的影响目标提取的噪点,不适合目标提取,图3(d)能很好地抑制背景噪点的干扰,但是对目标边缘有轻微影响,而图3(e)有很好的目标边缘,但是背景噪声较大,因此,本文将S通道和V通道进行比例融合,形成新的单通道图。
3 异物检测
本文所提的检测算法,是基于原有人工检测的方式,通过在车头车尾设置摄像头和人工条形背景光源,利用检测算法判断光源灯带的完整性,从而检测中间夹缝区域是否含有异物,具体检测流程如图4所示。
3.1 基于K-means聚类的二值化计算
传统的K-means聚类求解最优解的过程需要考察样本集D所有可能的簇划分,通过N次迭代,假设有M个数据对象,最终聚类数目为K,计算每个数据对象到各个聚类中心的距离,则K-means算法的时间复杂度是O(NMK)。本文针对单一的视野对象,可将簇内对象分为3类:高光强的灯带区域、背景区域和随光线变化的中间过渡带区域。经过实验,运行时间如表1所示,对于一帧640×480的图片,通过K-means聚类算法计算运行时间是724 ms,运算效率相对较低。为了提高运算效率,考虑无须对夹缝区域外进行检测,故通过划取感兴趣区域(ROI),将计算区域缩小。针对地铁外界环境小时段变化小,长时段变化大的特点,无需针对每一帧图像采用K-means聚类分割的方法,故本文提出以一辆列车到站和下一辆列车到站的时间差作为计算周期,通过K均值聚类计算二值化阈值的方法,将原视频图像二值化,提取灯带边缘,可进一步提高检测效率。
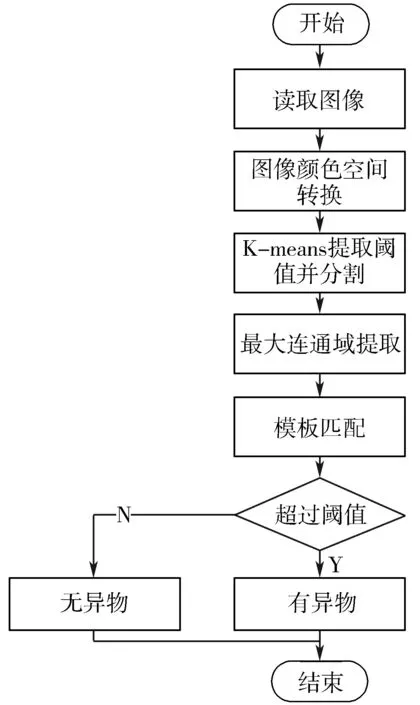
图4 检测算法流程图
(4)
(5)
其中,K=3为聚类数量,Ci为第i类簇的中心像素值,th为计算出的二值化阈值,Ib(x,y)为二值化后的图像。
原始的三通道图经过通道提取和融合,转化为单通道图像,经过K-means聚类算法可将图像分成3类即K=3,可计算出3个聚类中心点的像素值Ci(i=1,2,3),且从小到大排列。其中i=1时表示背景区域,i=2时的那个簇为灯带与背景的过渡区域,即灯带的内边缘和外边缘之间的区域,i=3时表示灯带区域。经过实验发现,拍摄图片灯带核心区域光强大且均匀,较稳定,而灯带的外边缘发散,波动大,为了提高灯带完整性,故提取灯带的内边缘,即第二类和第三类的分界线。采用式(4),通过灯带类的中心像素值和过渡带类的中心像素值求取均值,并将此均值作为灯带提取的二值化阈值。
3.2 最大连通域提取
图像经过二值化后会因为噪声的干扰而出现一些孤立点,需要进一步利用形态学操作来消除孤立点,或者孤立局部小干扰区域。利用公式(6),统计连通域的像素点,提取该图像内最大像素点数的区域。
(6)
其中,Mmax为最大连通域,n为连通域个数,zi为第i个连通域中像素的个数。
3.3 夹人夹物判断
通过式(6)提取出的最大连通域二值化图像,可计算出最大连通域的长度和宽度,通过式(7)与模板灯带进行比较,从而判断出灯带是否被遮挡,进而检测出空隙中是否存在异物。
检测结果=
(7)
其中,Lt为原灯带长度,Lm为最大连通域长度,tht为长度判断阈值,Wt为原灯带宽度,Wm为最大连通域宽度,wht为宽度判断阈值。在本文算法中,关于tht和wht的取值结果将直接影响检测的精度和稳定性。阈值过大,则准确率提高,漏检率增加;阈值过低,灵敏度增加,漏检率降低但误报率也增加。根据测试经验,宽度阈值采用模板宽度的1/2,长度阈值采用模板宽度的1/40,效果相对较好。
4 仿真实验
本实验通过在户外架设灯带和摄像头模仿地铁户外站台环境,灯带和摄像头之间的距离约60 m,摄像头拍摄图像大小为640×480。
实验配置如下:
操作系统Windows7,内存4 GB,CPU AMD A6-4400M,硬盘300 GB;软件平台为QT和OpenCV3.0。
表1 不同算法耗时对比

类型原图像提取时间/msROI图像提取时间/ms灯带完整性固定阈值方法0.050.01不完整K-means聚类72465完整K-means提取阈值0.050.01完整
表1中采用了文献[8]固定阈值的方法对灯带区域进行目标提取,单帧提取耗时很短,但是由于不能适应外部光线的变化,提取出来的灯带完整性差,不能很好地从背景中分割出来。基于K-means聚类的方法对原640×480的单帧做目标提取,需要不断地进行迭代运算,提取簇类中心,故耗时较长,通过划取感兴趣区域后,将640×480的单帧图像转化为500×60的小图像,再进行目标提取则可减少计算区域降低检测时间;通过提取的簇类中心计算出二值化阈值,无需进行迭代运算,可进一步提高检测效率,通过聚类计算自适应光线的阈值进行二值化,既能快速进行目标分割,又能完整提取灯带区域。
表2 不同宽度阈值时的检测对比

宽度阈值固定阈值(5个像素)模板宽度的1/3模板宽度的1/2模板宽度的2/3异物(≤2 cm)不能检测不能检测不能检测不能检测异物(2^8 cm)出现误检出现误检可以检测出现漏检异物(>8 cm)可以检测可以检测可以检测可以检测
表3 不同长度阈值的检测对比
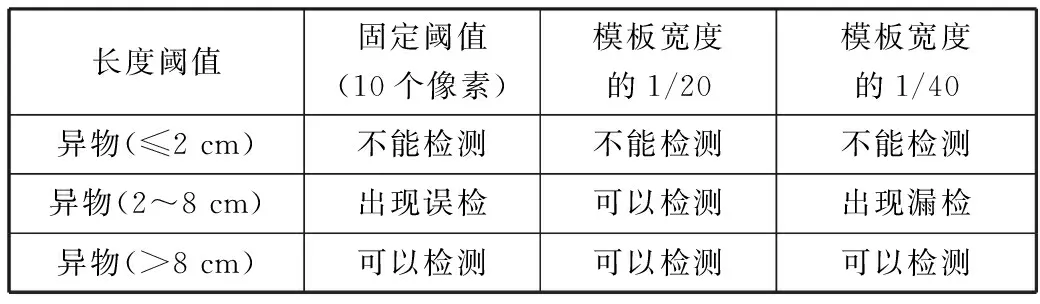
长度阈值固定阈值(10个像素)模板宽度的1/20模板宽度的1/40异物(≤2 cm)不能检测不能检测不能检测异物(2^8 cm)出现误检可以检测出现漏检异物(>8 cm)可以检测可以检测可以检测
表2是通过采用不同的宽度阈值进行的检测结果,表3是不同长度阈值的检测结果,阈值过大,则准确率提高,漏检率增加;阈值过低,灵敏度增加,漏检率降低但误报率也增加。实际检测效果与所采用的摄像头的精度、焦距和检测距离有关系。成像效果越清晰,像素点数量越多,检测效果越好,能检测到的异物越小,在该设备下,针对2 cm的小物体,不能很好地检测。误检的主要原因是阈值太小,出现光线突变扰动时,不能很好地适应。漏检主要是对部分小物体出现在边缘区域,不能检测。而针对地铁安全检测的风险,不可接受的风险主要是危害乘客生命的风险。而该方法主要是检测是否有乘客及可危害列车及乘客安全的大件物体。故主要是提高大件物体的检测准确率。
实际测试时,采用的灯带物理宽度为5 cm,长2 m。白天在图像中的成像的像素点宽度约10个像素点,宽度约480个像素点,晚上由于光线的辐射,宽度和长度会增加5个像素左右,因此不适合采用固定阈值,为了自适应,宽度阈值采用模板的1/2,长度阈值采用模板的1/40。
通过采集不同时间段不同天气状态下视频图像,共得到5 h视频数据,该视频数据包括白天、晚上,晴天和阴天等多种情况。在视频数据中,本文利用人工遮挡和放置异物(>2 cm)的情况模拟屏蔽门与列车门之间夹人夹物的情况,对采集的视频进行夹人夹物检测实验,通过测试其实验参数设置如下:S通道和V通道的融合比例分别为0.3和0.7。本文设计的方法能够很好地检测出列车停靠站台时行人上下车以及中间夹物时对光带完整性的影响,其准确率可达100%,检测显示结果如图5所示,上面2幅表示白天的检测效果,下面2幅表示晚上的检测效果。作为对比,本文引入地下地铁的异物检测算法作为比较,结果发现文献[8]中所提到的方法检测效果欠佳,准确率仅为50%,具体原因主要为不能自适应外部环境,而本文所设计的方法能够有效克服上述固定阈值方法中的不足,因此,对于户外站台的屏蔽门异物检测,本文的方法更具有优势。
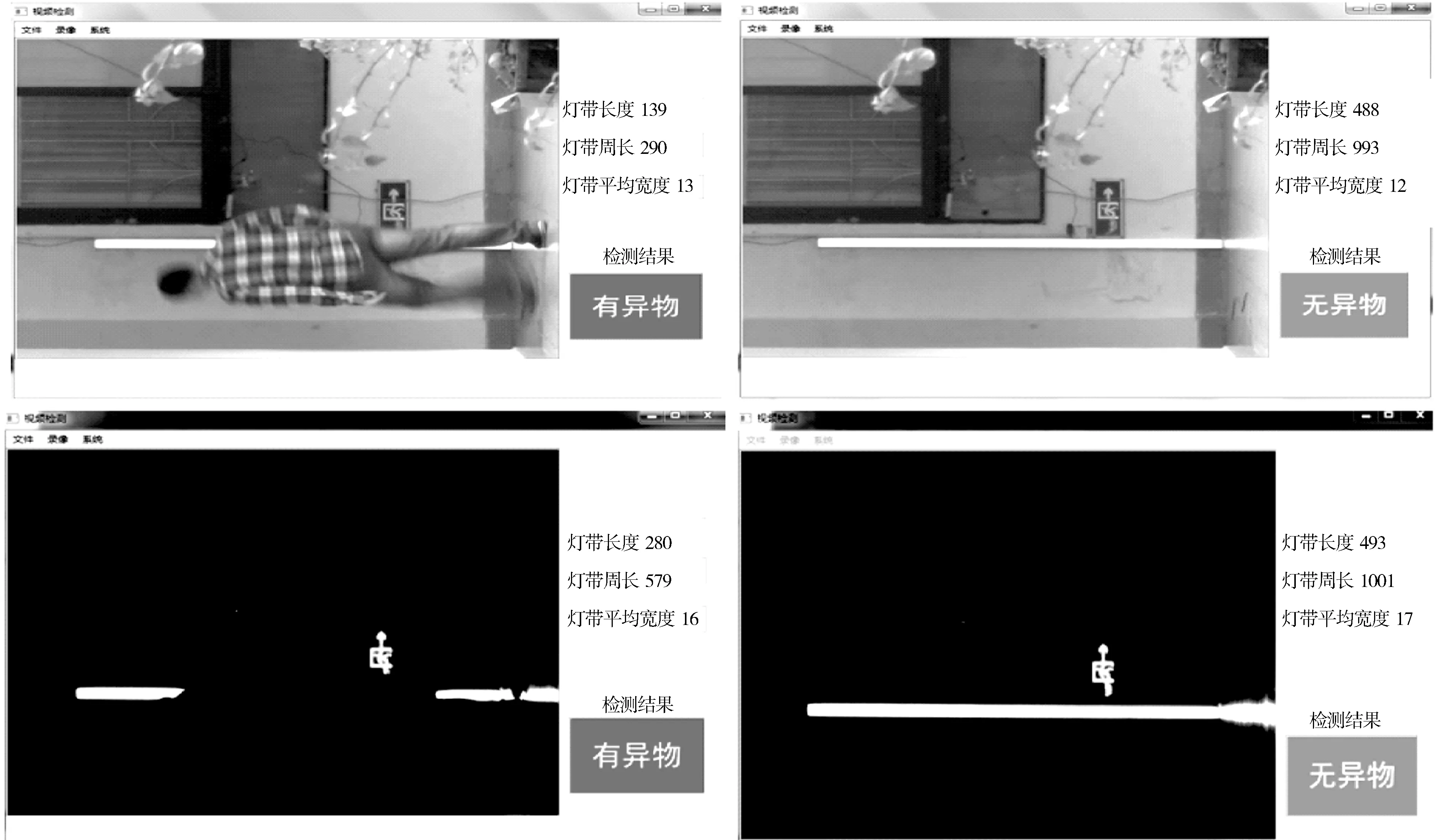
图5 界面检测结果显示图
5 结束语
本文在现有的户外地铁车门与屏蔽门间人工异物检测和地下站台光幕、激光、视频检测方法不足的基础上,利用计算机视觉技术提出了一种基于K-means自适应光线的地铁户外站台异物自动检测算法。该算法通过在车首放置摄像头,可以完整拍摄列车门与屏蔽门整个间隙的立体空间区域,通过在车尾构造人工光学背景,可以在狭缝区域的盲区小的情况下,实现高精度和高准确率的目标实时检测,同时还能和现有的人工检测方式相兼容。在算法上,通过将RGB颜色空间转化为HSV空间,提高对外界光线变化的鲁棒性,采用无监督的K-means方法,自适应提取阈值,通过阈值分割提取目标。该算法与已有的检测方法相比,具有检测精度高、盲区小、可自适应光线的优点。通过仿真模拟实验,结果表明,本文所提方法可以很好地检测出乘客上下车,可以辅助司机进行开车前的空隙异物检测。
参考文献:
[1] 邵蓉. 地铁屏蔽门车门夹人夹物防范措施讨论[J]. 科技视界, 2016(6):124-125.
[2] 李旭冬,叶茂,李涛. 基于卷积神经网络的目标检测研究综述[J]. 计算机应用研究, 2017(10):1-9.
[3] Hsu Y W, Ciou Y S, Perng J W. Object recognition system design in regions of interest based on AdaBoost algorithm[C]// International Conference on Information Fusion. 2017:1-5.
[4] Xu Dan, Ouyang Wanli, Ricci E, et al. Learning cross-modal deep representations for robust pedestrian detection[C]// IEEE Conference on Computer Vision and Pattern Recognition (CVPR). 2017.
[5] Huang Zhijie. Pedestrian detection algorithm in video analysis based on centrist[C]// IEEE International Conference on Intelligent Transportation, Big Data & Smart City. 2016:117-120.
[6] 王瑞峰,杨子河,孔维珍. 红外光幕在地铁屏蔽门障碍物探测中的研究[J]. 传感器与微系统, 2013,32(3):25-28.
[7] 黎卓虹. 屏蔽门防夹人激光探测装置安装方案探讨[J]. 中国高新技术企业, 2009(19):46-47.
[8] 黄华文,刘伟铭,李军,等. 地铁屏蔽门与车门间异物自动检测技术[J]. 铁路计算机应用, 2015(12):62-65.
[9] 吴卫海,刘伟铭,李海玉,等. 一种新的地铁曲线站台异物检测系统研究[J]. 城市公共交通, 2015(9):33-36.
[10] 谭飞刚,刘开元. 基于机器视觉的地铁曲线型站台异物检测算法[J]. 深圳信息职业技术学院学报, 2017,15(1):75-77.
[11] 刘靖明,韩丽川,侯立文. 基于粒子群的K均值聚类算法[J]. 系统工程理论与实践, 2005,25(6):54-58.
[12] Sauvaget C, Boyer V. Stylization of lighting effects for images[C]// IEEE the 6th International Conference on Signal-Image Technology and Internet Based Systems. 2010:43-50.
[13] Liu He, Wang Yadong, Wang Lei. The effect of light conditions on photoplethysmographic image acquisition using a commercial camera[J]. IEEE Journal of Translational Engineering in Health & Medicine, 2014,2:1-11.
[14] Gritti T, Monaci G. Automatic light scene setting through image-based sparse light effect approximation[J]. IEEE Transactions on Multimedia, 2012,14(4):1351-1358.
[15] Cohenaddad V, Klein P N, Mathieu C. Local search yields approximation schemes for k-means and k-median in Euclidean and minor-free metrics[C]// The 57th IEEE Annual Symposium on Foundations of Computer Science (FOCS). 2016:353-364.
[16] 董素鸽,胡代弟. 显示图像复杂目标优化识别仿真研究[J]. 计算机仿真, 2017(5):453-456.
[17] 张文达,许悦雷,倪嘉成,等. 基于多尺度分块卷积神经网络的图像目标识别算法[J]. 计算机应用, 2016,36(4):1033-1038.
[18] 王维哲,李娜. 一种去光照干扰的运动目标图像分割算法[J]. 科技通报, 2015(6):166-168.
