基于STM132室内可见光定位系统的实现
2018-06-27胡玉松
胡玉松


摘 要:随着移动通信与无线网络等技术的发展,室内可见光定位技术越来越受到人们的关注。文章针对室内可见光定位原理,基于信号到达时间的距离的测量方法,给出了以STM32F103ZET6为核心处理器来实现室内可见光定位的设计方案,并对在80 cmx80 cmx80 cm定位空间内采用呈网格分布的多个点进行了测试,对于实测的平均定位误差为10 cm以内,验证了方案的可行性及有效性。
關键词:室内定位;可见光通信;到达时间
室内无线定位技术随着移动通信与无线网络等技术的发展日趋成熟,基于位置识别的服务(Location BasedServices,LBS)正受到越来越多的关注,其中信号到达时间(Time of Arrival,TOA)技术是实现LBS的关键之一[1]。 可见光室内定位技术作为一种新兴定位技术,其具有能效高、绿色环保、不受电磁干扰影响等优势,成为近年来的一个研究热点,也最具应用前景[2]。本文通过TOA技术来对距离进行测量,采用三边定位法来实现位置估计。为了实现室内定位,使用STM32作为处理器,并搭建硬件系统,在80cmX 80 cmX 80 cm定位空间内采用呈网格分布的多个点进行了测试,验证了方案的可行性及有效性。
1 LDO架构
1.1 定位原理
在室内可见光定位系统中,由天花板上固定位置的LED阵列发射具有唯一位置信息数据帧结构的可见光信号,当接收器位于LED光源下方时,接收器上的可见光传感器接收到LED光源发出的带有位置信息的可见光,通过解码、解调等信号处理后恢复出原始信号,并传送给STM32处理器进行相应的定位算法分析得到移动目标的位置。
1.2 定位算法
本文采用的几何测量法,该方法通过光接收器测量待测点与已知位置的LED灯的几何关系,再通过把数据传回给处理器,处理器通过特定的运算以获取待测点的位置信息。三边法依据待测点到3个不在同一直线上的LED灯的距离,以这3个LED为圆心,以测量的三边距离为半径做出3个圆,这3个圆的交点便是待测点的位置。但还需要使用一种方法计算待测点的位置,这里采用TOA的测量方式。具体操作是3个LED同时或者分时发射具有唯一位置信息数据帧结构的可见光信号,光接收器通过检测光到达传感器的时间,这个时间记为t,通过公式(1)可以得到待测点到参考点(LED灯的位置)的距离:
R=C·t
(1)
通过上面的分析,可以得到三边定位法的公式为:
其中,(X1,Y1,Z1),(X2,Y2,Z2),(X3,y3,Z3)分别为3个LED灯的位置坐标,R1,R2,R3分别为待测点S到发送端的距离,(xo,Yo,Zo)为待测点S的坐标。3个LED成三角关系安装于室内屋顶(同一平面),故Z1=Z2=Z3=H(H为LED灯离地面的高度),且传感器及待测点都在地面,所以Zo=0,这样就少一组数据,简化了计算。通过简单的数学计算便可以得出S的坐标(x,y,0)。
2 室内定位系统的设计实现
2.1 硬件系统设计
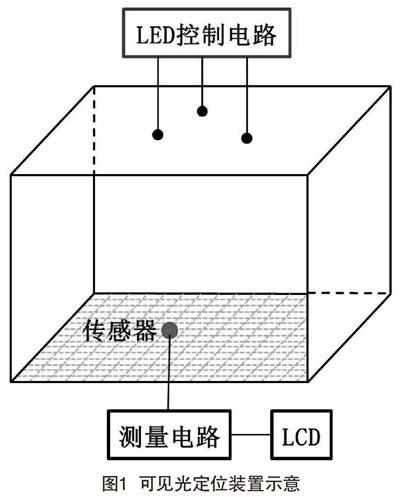
为了获得更高的精度,本系统需要使用3个LED作为信息发送点,且这些LED不能在同一条线上,这3个LED位置信息也必须已知。因利用三边定位法来测量位置信息,需要先将光信号转化为电信号,采用GY-30完成此功能,GY-30内置AD模块,将模拟信号转换为数字信号,减少了外围电路设计,提高了抗干扰能力。GY-30出来的数据传送给STM32单片机,通过三边定位法进行计算得出位置信息。为了方便查看位置信息,系统采用液晶显示器进行实时显示。室内定位场景如图l所示,使用5块木板搭建一个方盒子,方盒前面空出。木盒实际大小为80 cmX80 cmX80 cm,为方便测试数据,在木盒底板绘制了方格,具体如图1所示。
为了增加测量精度,传感器由4个GY-30构成,4个GY-30测得的数据取平均值,存入数据库中,通过查询数据库并于接收到的实际位置信息进行对比判定后,将接收数据映射到LCD屏幕上,从而实现基于室内环境的定位[3]。
2.2 软件实现
为方便得到位置信息,通过LCD显示器显示坐标。整个工作流程:STM32系统上电后,经过初始化后,开始捕获传感器初始数据。数据捕获完后,单片机通过继电器发出控制命令驱动3个SW的LED点亮,并在同时计算传感器接收到信号的时间,通过三边定位法计算,在经过滤波处理得出(x,y,0)的坐标值,然后驱动LCD显示器显示坐标信息[4]。
3 测试结果
定位系统的实物模型是80 cmX80 cmX80 cm的立方体木盒,3个LED成三角形关系安装在木盒顶部,LED通过驱动电路来控制开关。木盒底部画出了网格,可以快速得出实际位置值,便于与系统检测出的值做对比[5]。检测传感器由4个GY-30模块完成,最终的检测值取4个传感器平均值数。对坐标值进行多次测量,测量结果如表l所示。
根据上述测试数据,定位误差在10 cm以内,测试满足了基本要求,并可以判断传感器放置的区域。
4 结语
可见光定位技术具有非常大的潜在市场,具有能效高、绿色环保、不受电磁干扰影响等优势。本文结合三边定位原理,通过搭建一个80 cmX80 cmX80 cm的可见光定位系统并测试,测试验证定位精度低于10 cm,实验证明了可见光定位的可操作性,也验证了三边定位法的有效性。
[参考文献]
[1]赵嘉琦,迟楠.室内LED可见光定位若干关键技术的比较研究[J]灯与照明,2015 (1):34-41.
[2]董文杰,王旭东,吴楠,等基于LED光强的室内可见光定位系统的实现[J]可见光通信,2017 (3):4.
[3]吴楠,王旭东,胡晴晴,等基于多LED高精度室内可见光定位方法[J]电子与信息学报,2015 (3):727-732.
[4]王旭东,胡晴晴,吴楠.高精度室内可见光定位算法[J]光电子·激光,2015(5):862-867.
[5]旷亚和.基于LED的无线数据传输技术研究与设计实现[D]大连:大连海事大学,2014.
