基于无线射频识别的自动象棋整理机设计*
2018-06-27沈孟锋何剑敏虞润尧周建锋余蔚迪
□ 沈孟锋 □ 何剑敏 □ 虞润尧 □ 周建锋 □ 余蔚迪
杭州科技职业技术学院机电工程学院 杭州 311402
1 研究背景
中国象棋历史悠久,爱好者众多,是老年人休闲娱乐的一项重要活动。国内研究象棋机器人的项目众多,如上海交通大学研制了实时环境下的对弈象棋机器人控制系统,哈尔滨理工大学设计了具有3个自由度的平面关节型机器人结构象棋机器人[1],郑州机械研究所研制了采用视觉传感器识别的高智能化象棋对弈机器人等[2-4]。以上项目研究的象棋机器人体积大,成本高,在安全性能方面存在问题,不适合普通象棋爱好者使用。再者,象棋只有在对弈者之间真切进行,才更具观赏性和娱乐性[5]。
笔者研制了一款价格低廉、操作简单、使用方便、适用范围广的自动象棋整理机,旨在实现象棋的识别、整理和摆谱等功能,以提高下棋效率,降低对弈者的劳动强度。
2 整体设计
象棋棋子采用三维打印技术打印,内嵌有无线射频识别(RFID)电子标签。棋盘上装有集棋机构,可以将棋子全部集入梯形导槽。棋子通过凹型轮逐一导入至装有RFID检测装置的设定位置,该位置即为三坐标定位机构的初始位置。控制系统检测到棋子并进行身份识别后,通过机械卡爪对棋子进行定位摆放,直至全部棋子按规则摆放完毕。由推棋机构和电动升降机构将摆放齐全的棋子推至上棋面,整个流程结束,等待下一次整理。自动象棋整理机系统框图如图1所示,其主要设计特点如下:①结合机械及电控原理设计一键操作,降低了对弈者的劳动强度,适用范围广;②采用三维打印技术实现个性化棋子设计需求,拓展私人定制功能;③基于RFID技术,采用单片机控制对棋子进行身份识别;④配合精密丝杠导轨,设计三坐标定位机构,对已识别的棋子进行摆位,成本低,控制方法简单;⑤采用闭环控制,由凹型轮配合梯形导槽对棋子进行筛选分离处理,使识别区域每次仅有一颗棋子,控制精度高。

▲图1 自动象棋整理机系统框图
3 机械结构设计
自动象棋整理机机械结构由集棋机构、棋子分离机构、RFID机构、三坐标定位机构、推棋机构、电动升降机构等组成,并包括型材、控制按钮、移动滑轮等辅助件。
自动象棋整理机机械结构如图2所示,采用立体设计,分成三层,上层为下棋平台,中层为自动整理平台,下层为控制装置。机械部分与控制部分分离,便于控制与维护,同时做到使用安全。下层由供电电源、单片机控制系统等构成。中层部分的机械机构根据工作步骤纵向排布,并在操作位置设置开始、急停按钮。

▲图2 自动象棋整理机机械结构
3.1 集棋机构
集棋机构位于棋盘的一侧,由步进电机、联轴器、滑块、滑轨、扫棋器组成。步进电机位于上棋面下侧,通过联轴器与扫棋器相连接。扫棋器为一个平面连杆机构,由步进电机带动曲柄旋转,使与摇杆相连的滑块作水平运动,水平运动的滑块带动梯形导槽将棋子推入棋子分离机构。
集棋机构主要通过步进电机带动来实现梯形板的水平推移,从而实现将所有散乱棋子全部推入指定位置的功能。
3.2 棋子分离机构
棋子分离机构位于自动象棋整理机的侧面,由步进电机、棋子滑道、凹型轮、梯形导槽组成,如图3所示。棋子分离机构上半部分是一个梯形导槽,棋子被推入导槽口,因重力下滑,在导槽壁的作用下全部变为竖直排列且不重叠堆放状态。梯形导槽下侧出口只允许一个棋子通过,与凹型轮连接。

▲图3 棋子分离机构
棋子分离机构下半部分是棋子分离器,当所有棋子堆放完毕后,步进电机开始工作,带动凹型轮旋转。凹型轮是一个带有缺口的圆凸轮,每旋转一周,能将一颗棋子带到滑道口,并通过滑道滑到夹取平台,从而实现棋子的分离。凹型轮结构如图4所示。
棋子分离机构外表面框面由亚克力板搭建而成,美观轻便,强度高,便于拆卸更换。
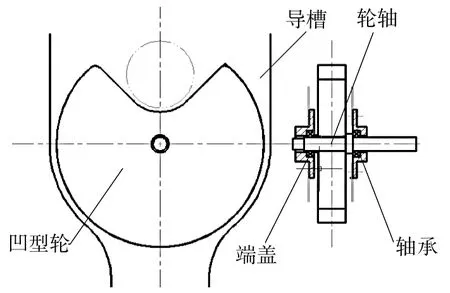
▲图4 凹型轮结构
3.3 RFID机构
RFID机构由RC522读卡器芯片和平台组成[6]。棋子内嵌RFID电子标签,RC522读卡器芯片安装于平台下,棋子通过滑道停留在平台上,就会被芯片扫描识别。平台只允许一个棋子停留,当芯片识别到棋子时,棋子分离机构的转盘将停止旋转,直到平台上的棋子放置好位置。
3.4 三坐标定位机构
三坐标定位机构由十字坐标系及机械爪、步进电机组成,可实现X轴、Y轴、Z轴三个方向的控制[7]。每次启动时,坐标轴会进行初始化,回归零位,之后便可以实现正常的抓取放置功能。舵机带动爪片上的齿轮,齿轮转动带动两个卡爪张开和闭合,通过卡爪的张闭来抓取棋子。因为棋子的直径为46 mm,所以卡爪的夹紧范围为46~47 mm。卡爪中间有个圆弧结构,刚好可以卡住一颗棋子,以保证抓取的棋子在传输过程中不会脱落。
3.5 推棋机构
自动象棋整理机棋面包括上棋面和下底面。上棋面是使用者对弈的棋面,下底面是另一副棋子的预摆放棋面,两棋面共用一个升降面。升降面即开局时棋子摆放所处的面,共四块,为两个车-帅(将)面和两个兵(卒)-炮(砲)面。当使用者在对弈时,下底面在摆棋,此时升降面作为上棋面,可见下底面摆放并不是在升降面的位置,而是在升降面错开一格棋的位置。当对弈者弈完一盘棋后,升降台下降,此时需要推棋机构将棋子推到升降台的升降面。
推棋机构用到了铰链滑块及滑轨[8],如图5所示。由步进电机带动滑轨使两块平行板平移,实现兵(卒)、车、帅(将)棋子的放置。同时,平行板移动带动铰链滑块机构,将炮(砲)棋子推入升降台。完成推棋动作后,推棋机构归位,等待升降。

▲图5 推棋机构
3.6 电动升降机构
电动升降机构由支撑架、电动推杆和升降棋面等组成[9],如图6所示,图中升降棋面未显示。当使用者按下开关,上棋面棋子全部进入梯形导槽后,电动推杆带动支架下降至下底面,推棋机构将已摆好的棋子从下底面推送至升降面。推送完成后,电动推杆上升,将升降面和摆好的棋子推送至上棋面,至此,电动升降机构流程结束。

▲图6 电动升降机构
4 控制系统及程序设计
控制系统主要完成自动象棋整理机部件的时序控制及执行机构的动作控制,功能包括显示、自动收棋、棋子检测、棋子抓取、棋子摆放、棋子移位、棋面升降、系统复位等。控制系统选用STC12C5A60S2单片机作为控制单元,执行机构采用3台步进电机、2个丝杠滑台模组、1个舵机,检测部件采用3个金属接近开关、1块RC522读卡器芯片。控制系统可以实现信号读取及反馈功能,实现对步进电机的精确控制[10]。图7为自动象棋整理机控制系统的程序框图。
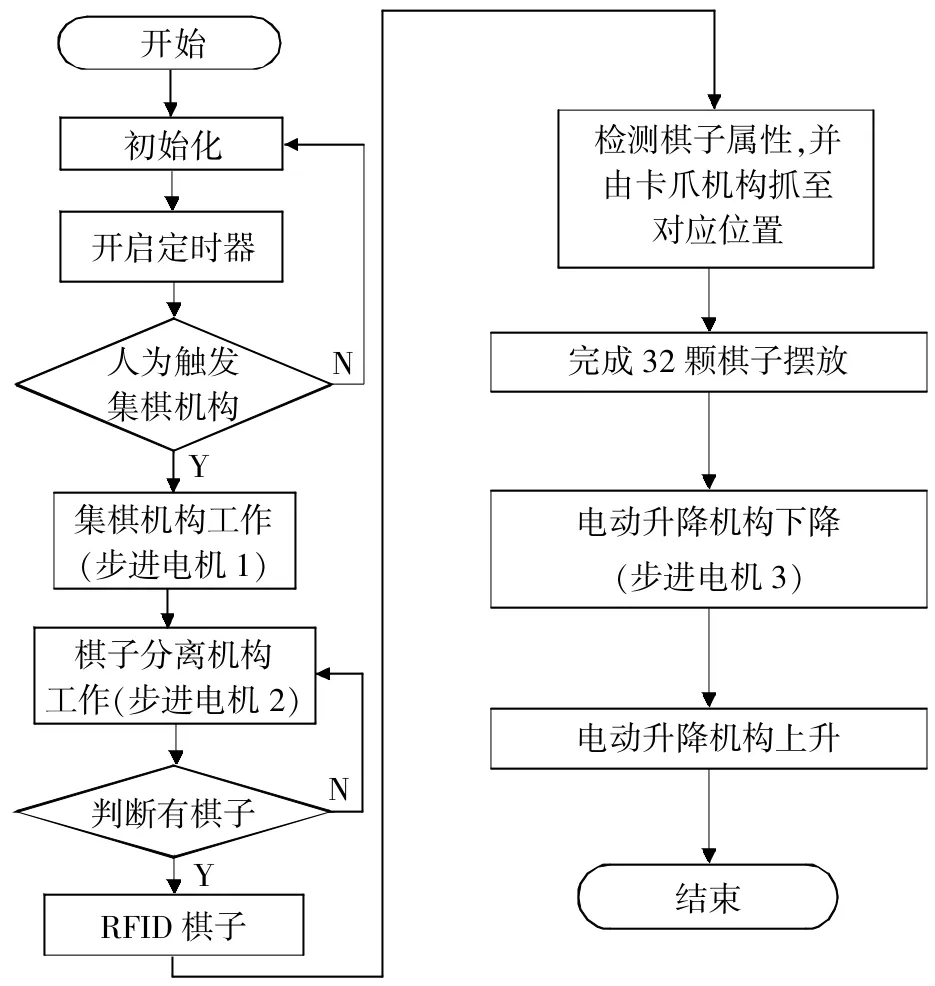
▲图7 自动象棋整理机控制系统程序框图
5 试验验证
经过方案设计及相关计算后,采用30 mm×30 mm铝合金型材搭建自动象棋整理机,外形尺寸为 0.9 m×0.9 m×0.8 m,如图8所示。

▲图8 自动象棋整理机照片
笔者通过大量试验验证了以下功能:①混乱棋子的收集;②棋子在收集处单一下落;③RFID检测出每个棋子的属性;④通过机械卡爪抓取棋子;⑤通过三坐标摆放棋子;⑥推棋机构将棋推到指定位置;⑦电动推杆实现升降。
6 总结
基于RFID的自动象棋整理机控制系统软硬件设计正确,各模块机构能完成设定动作,一键式操作简单,能够实现对32颗棋子的位置摆放,且编程控制具有性能好、可靠性高、易于修改和扩展等优点。这一自动象棋整理机可实现自动收棋、棋子检测、棋子定位摆放、棋子推送、棋面升降等整理动作,棋子摆放整齐,工作可靠。对弈者在对弈过程中,设备已经开始整理棋子,对弈者弈完一盘棋后,第二副棋子直接上升,可以继续进行对弈。自动象棋整理机降低了对弈者的劳动强度,且能耗低,操作简单,适合广大象棋爱好者使用。
[1]尤迪.中国象棋人机对弈装置电子棋盘和机械手的研究[D].汉中:陕西理工学院,2016.
[2]王殿君.基于视觉的中国象棋棋子识别定位技术[J].清华大学学报(自然科学版), 2013,53(8):1145-1149.
[3]叶卉,张为民,张欢,等.机器人智能抓取系统视觉模块的研究与开发[J].组合机床与自动化加工技术,2016(12):1-5.
[4]朱一峰.象棋机器人视觉识别算法研究[J].江汉大学学报(自然科学版),2013,41(3):51-56.
[5]黄双,陈路,沈鑫,等.智能型实物棋盘人机对弈象棋机器人的制作[J].大学物理实验, 2014,27(1):42-46.
[6]李作海,姚锡凡.基于RFID的信息集成柔性制造系统设计研究[J].组合机床与自动化加工技术,2011(4):14-18,23.
[7]陈远超,沈孟锋,费凯,等.自适应电磁阻尼式高楼逃生缓降器设计[J].机械制造,2012,50(6):6-8.
[8]王兴东,杨柏,孔建益,等.计及尺寸公差和配合的平面连杆机构优化设计[J].华中科技大学学报(自然科学版),2017,45(3):23-28.
[9]孙江宏,何世凤,潘尚锋.一种新型自动调平平台结构与控制系统设计[J].机械设计与制造, 2015(7):11-15.
[10]廖平,韩伟伟.基于STM32多步进电机驱动控制系统设计[J].仪表技术与传感器,2016(4):71-73,77.
