爬壁机器人结构设计及曲面磁力吸附关键技术研究
2018-06-24孟宪宇董华伦
孟宪宇,董华伦
(长春理工大学 机电工程学院,长春 130022)
0 引言
随着我国经济的快速发展,大型石油、药品、化工储罐越来越多,但是检测和清洗工作仍处于落后的人工方法,同时随着近几年对环保问题的重视,人工作业已经不符合发展的客观要求。最近几年越来越多的机构开始将目标投向智能机器人方面,通过远程操作机器人实现快速智能检测。从各国研究的状况来看,爬壁机器人真空吸附方面各国都做了大量的研究实践,但磁吸附方面,只有日本较为突出先进[1]。其中,日本的Inoue.K[2]等人研制出的攀爬网状壁面的爬壁机器人,仿照蜘蛛六足结构可实现多维度运动;Fischer[3]等人设计使用的磁轮“母子”结构,使越障性能大大提高;国内的磁吸附机器人从上世纪开始也得到了大力发展,大连海事大学的衣正尧[4]设计的永磁真空混合吸附机器人,负载能力强。目前,罐壁爬壁机器人就吸附性可靠性有待合理解决。因此我们设计了智能永磁吸附爬壁机器人样机,如图1所示,并在罐壁进行了试验,试验样机可在罐壁上实现灵活爬行,运动性能极佳。
本文设计的爬壁机器人,主要应用于储油罐、化工罐、药物反应等大型罐壁清洁和检测工作,减少人工工作量以及人与化工危险产品的接触,达到快捷精确的清洁和检测。本文将先对机器人结构进行设计介绍,提出磁力吸附结构;然后对本文研究设计的磁力吸附结构,建立了其三维磁场分布,并运用ANSYS仿真软件进行仿真,通过磁力分析提供吸附可靠性的数据。
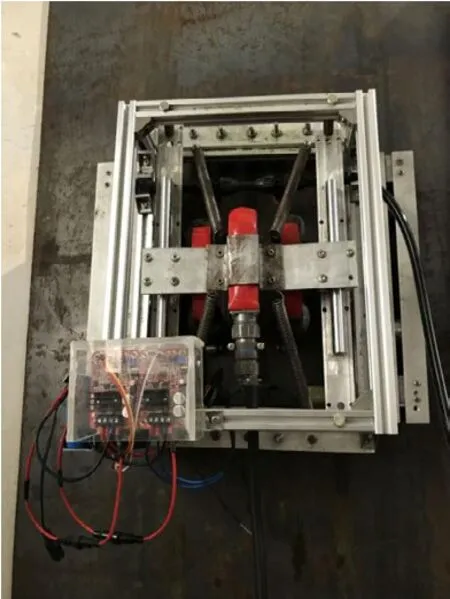
图1 爬壁机器人样机壁面吸附状态
1 机器人系统结构设计
1.1 机器人的设计思路
机器人爬壁吸附方式主要分为三种:真空吸附、磁力吸附和推力吸附。但真空吸附在凹凸不平和粗糙的壁面,容易漏气造成吸附能力变差,而推力吸附稳定性差精度低。磁力吸附壁面吸附能力强且稳定性强精度高。磁吸附[5]又分为电磁吸附和永磁吸附两种。但电磁吸附需要耗电,而工作时间一般较长,且壁罐一般是导磁材料,故选取永磁吸附技术。
机器人爬壁移动结构主要有:车轮式、脚足式、履带式、轨道式等。车轮式速度较快,但是对壁面要求程度较高,越障能力差。脚足式越障能力虽然强但是移动速度有限,且不易控制。轨道式灵活性差,且罐壁需要全部检测和清洗,不适合。履带式着地面积大,越障能力强,且通过试验控制也消除了转弯的问题。因此选用履带式行走机构。
1.2 结构设计
依据上文的思路设计出了履带式永磁吸附机器人,三维结构如图2所示:1为履带行走机构,2为清洗机构,3为磁探头,4为摄像头,5为永磁吸附机构。机器人履带行走机构分别由两个减速电机带动,同时两个电机分别由俩个PWM脉宽调节器控制,通过控制两个电机的转动实现机器人的转向。机器人的清洗机构由两个高压水枪组成,清洗剂可以根据情况使用,实现清洗和除锈等多功能。机器人的磁探头,通过对特定位置的充磁产生磁化反应,从而判断检测。机器人的摄像头位于磁探头周围,为的是更清晰精确地对准检测部分。机器人的永磁吸附机构中的磁性材料为钕铁硼。该材料具有体积小、重量轻和磁性强的特点。同时吸附机构中的磁极交互布置能保证磁力线的合理分布。为了加工方便和履带行走机构的对称,要求永磁铁的块数为偶数。为了减轻重量,机器人全身多为铝合金材料,总质量为6kg,考虑到履带与罐壁之间的摩擦系数为0.9,因此所需吸附力为54N。
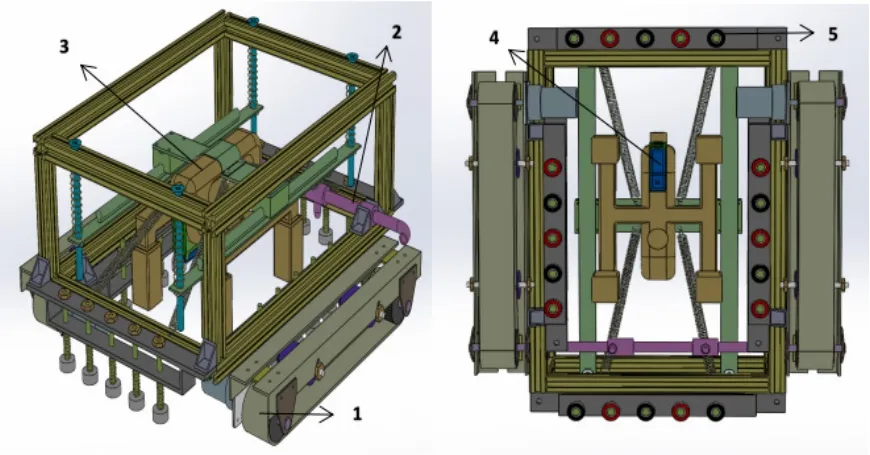
图2 机器人三维图
爬壁机器人必备的基础功能为:罐壁吸附和行进作业。爬壁机器人在作业时往往要携带检测仪器、摄像仪器、清洗仪器等,所以对机器人的负载能力有一定的要求,若负载越大时,要求吸附机构提供的吸附力越大。但是,巨大的吸附力对机器人的行进产生阻力,运动性能变差。所以如何合理地调节磁极与罐壁的距离是机器人研究的关键问题之一。本文提出了一种磁力吸附机构,使其可以在吸附的前提下运动性能得到更好的提高。
磁力吸附机构是机器人的核心机构,该机构中的磁力材料可以通过调节磁极与管壁间的距离,从而改变吸附的效果。该磁力吸附机构如图3所示该磁力吸附机构由单个磁力材料组成,而每个磁力吸附单元可通过螺母螺栓来实现与罐壁距离的大小来实现磁力大小的变化,从而实现变磁力吸附。永磁体选用钕铁硼材料,该材料具有重量轻,体积小,但同时具有极大的磁力,增强了磁力吸附效果。图4为永磁体的工作原理。
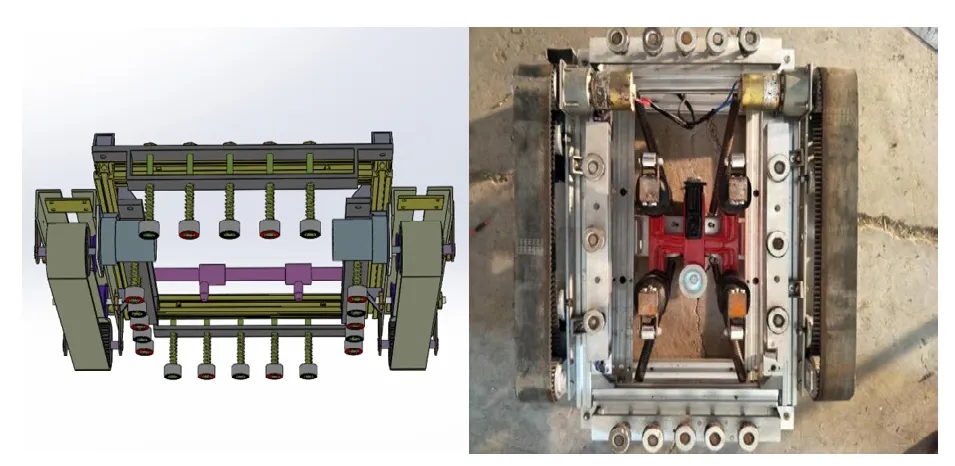
图3 磁力吸附机构三维及实物图
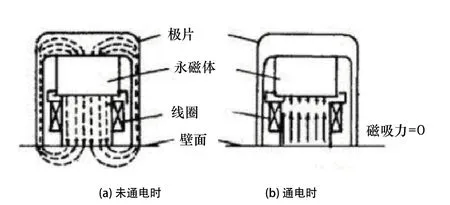
图4 永磁体吸附原理
在样机中,选用16个直径为20mm,厚度为10mm的圆形小磁铁均布在底盘上,如图5所示。当电源供电时,磁体与罐体之间的磁力可以使样机在壁面上平稳灵活的移动,同时也能保证样机不会从垂直壁面上掉落。
该变磁力吸附机构由于磁吸盘与壁面为非接触吸附,没有摩擦力,使机器人移动和转向阻力小,运动灵活性好;同时磁吸盘磁能密度高,与壁面形成平板状吸附,吸附力大,使机器人运动能力得到提高;而且当作业完成后,通过调节吸附力,可使机器人易于从工作环境脱离。

图5 磁力吸附机构
2 磁场分析与仿真
本文机器人采用的是永磁吸附技术,所以必须保障机器人在作业时不受外磁场的影响。对磁吸附力的计算须知磁感应强度。因此研究永磁体在罐壁区域内产生的磁感应强度是分析机器人合理吸附的关键。本文将利用ANSYSMaxwell软件仿真机器人在罐壁作业时周围的磁感应强度的分布情况,然后通过计算得出磁吸附力。
2.1 数学模型建立
利用ANSYS有限元分析法,其分析原理为:将连续求解区域分割成有限个网格单元,通过对每个网格单元内磁势和电势来求解在一定的边界条件下的近视函数,进而求解出整体区域的近视函数。
本文采用矢量位法计算模型,其磁场麦克斯韦方程[6]为:

式中:J为电流密度;μ为相对磁导率。又因场量和源量不因时间发生变化,故客观静态电磁场将呈现出单一静态磁场效应。
根据磁通量的连续性,引入适量磁位A,所以:

经过推导,得出磁失位满足的泊松方程:

本文所述机器人永磁体分布为对称分布,因此可将磁场认为轴对称静态磁场,根据初始条件和边界条件可得其控制方程为:

式中:
Ω为整个有效场域,磁矢位A为待求量。
2.2 仿真分析
2.2.1 几何参数设定
对于几何参数的设计为了进行准确地模拟实际,因此全部采用实际参数。通过查阅相关资料[7]得知国内外大型罐体标准1.5~32mm之间,为方便计算分析取壁厚为10mm。出于对圆柱罐体外壁涂层的导磁性以及镀层的考虑,因此保留一定的设计余量,将永磁体与罐壁的初始距离定为0.2mm。其中永磁体材料为钕铁硼(NdFe35),罐壁材料为优质碳素钢(steel1010),空气气缝为空气,同时相对磁导率为μ=1.0。同时考虑到爬壁机器人材料的影响,故对机器人进行简化,仅剩永磁体单元进行分析。简化后如图6所示。
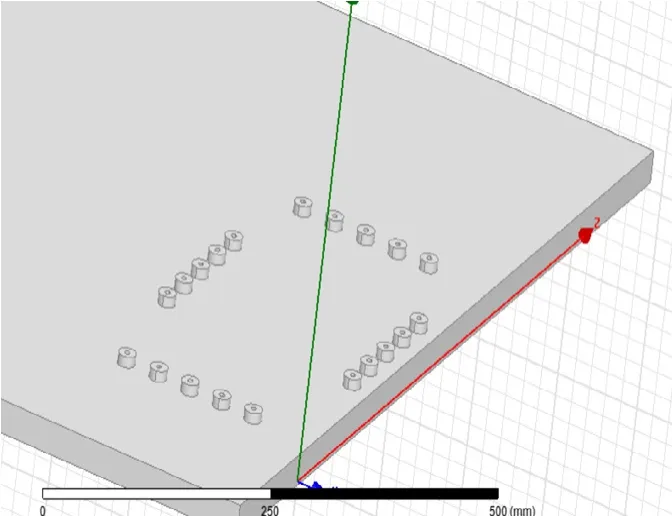
图6 简化后的模型
2.2.2 仿真分析
图7描述的是机器人吸附在壁灌上时的磁感应分布,当相邻磁力吸附单元磁极性相反时,两者间将会形成磁回路现象;同时两者之间虽然存在气隙,但是磁力吸附单元与壁面仍具有很强的吸附力。

图7 磁力线分布图
对简化后的参数化处理[8]后,对零件进行仿真,首先对模型进行网格划分。网格划分对仿真分析极为重要,网格划分的越细密,仿真的结果也会更加的准确。
图8描述的是机器人仿真时的网格划分情况及仿真后的结果。从图五可以看出,磁力吸附单元的周围网格划分非常密集,这和实际磁力吸附单元周围磁感线分布情况相似,对于网格划分效果非常满意。网格划分后对模型进行分析,从仿真结果可以看出磁感应强度最大能到7.28mT,因此可知吸附效果明显。

图8 网格划分及结果图
为了更加清晰的看出磁力吸附机构的效果图,故做出磁力吸附单元的磁感应效果云图如图9所示。从图9可以看出由于磁力吸附机构具有体积小的特点,所以各个磁力吸附单元之间磁力的相互影响效果并不明显,只有一些零星的磁力交叉点,但从整体看出各个磁力吸附单元吸附效果较好。并且从磁力吸附单元中心处向外磁感应强度逐渐加强,至吸附单元环状的中心处达到最大,随着向外磁感应强度又逐渐减小。当逐渐远离吸附单元时,磁感应强度逐渐减小至0。
当机器人吸附在罐体上时,两者之间的气体缝隙距离较小,将气隙近似看作均匀状态,而将罐体表面分为n份,则总的磁吸附力为:

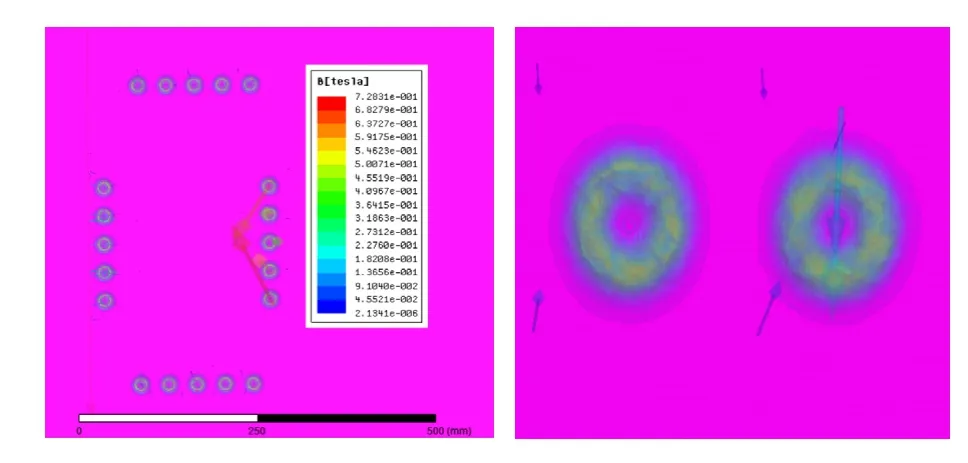
图9 磁感应强度分布云图
为了更加清晰地显示磁力吸附的可靠性,现对磁场进行参数化受力分析,设定罐壁与磁力吸附单元的初始间距为0.2mm+mx,同时定义变量mx为0.1~3.9mm以每一次0.2mm递加进行参数化扫描。得出如图9结果。
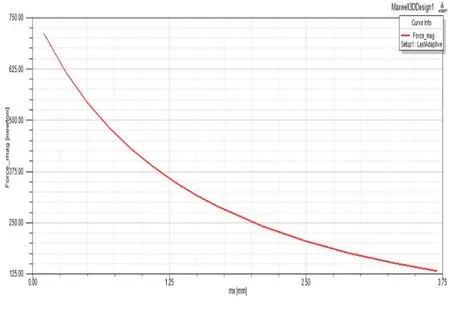
图10 吸附力随间距变化曲线
从图10看出在罐壁与磁力吸附单元间的距离在0.1~1.25mm间,磁吸附力变化显著。磁吸附力随着距离的增大而逐渐变小,由最大的720N降至375N,但仍远远大于所需要的吸附力54N。而罐壁与磁力吸附单元间的距离在1.25~3.75mm间,磁力吸附变化趋于平缓,逐渐趋于125N。可以得知在间距为0.1~3.75mm之间时磁力完全能够保障爬壁机器人所需的磁力要求,不会产生滑落现象。
3 实验论证
将制作好的样机吸附于罐体上,将间距由0.1~3.75mm进行调整观察机器人吸附情况。如图11所示。因为图示为效验磁力吸附机构效果,因此去除电机、磁探头等机构。但是实际机器人在作业过程中需要负重,故对机器人铝合金上负载5kg进行试验。实验过程中机器人并没有发生滑移,证明吸附效果可靠。

图11 机器人样机吸附实况图
4 结论
为了提高罐壁快速准确检测与减少人力物力的损耗,本文设计了一种罐壁爬行检测机器人。该机器人由三个机构组成:履带行走机构,变磁力吸附机构和远程
【】【】传输机构,可实现机器人的远程传输,变磁力吸附及罐壁自由行走等特点,能达到远程,实时监控的功能。为了研究磁力吸附效果和磁场的分布以及磁力与罐壁间的距离地关系曲线,利用ANSYS对模型进行仿真分析,直观地观察到磁力吸附机构下的磁感应云图,并通过对磁力与罐壁间的距离地关系曲线地分析得出在间距在0.1~3.9mm之间时,磁力吸附机构能够保障爬壁机器人的正常工作同时不产生滑落现象。
[1]闫久江,赵西振,左干,等.爬壁机器人研究现状与技术应用分析.机械研究与应用,2015,03(067),52-54+58.
[2]Inoue.K,Tsurutani.T,Takubo.T.Omni-directional Gait of Limb Mechanism Robot Hanging from Grid-like Structure[C].Robots and Systems,2007:1732-1737.
[3]Fischer W,Tache F,Siegwart R.Inspection system for very thin and fragile surface,based on a pair of wall climbing robots with magnectic wheels[C].IEEE/RSJ International Conference on Intelligent Robots and Systems.Piscataway,NJ,USA:IEEE,2007:1216-1221.
[4]衣正尧,弓永军,王祖温,等.新型船舶壁面除锈爬壁机器人动力学建模与分析[J].机械工程学报2010.46(15);23-30.
[5]汪家斌,子丽荣.壁面移动机器人吸附方式的研究现状与发展机械,2012,1(39):1-5.
[6]张克通,王化明.圆柱永磁体磁场及磁力分析[J].电气技术与自动,2010,03(050):161-164.
[7]吴龙平,眀斐卿,罗丽华,等.国内外大型储罐的标准对比.油气储运,2010,29(12):933-939.
[8]丁欣硕,凌桂龙.Ansys workbench14.5有限元分析案例详解[M].北京:清华大学出版社,2014.
[9]闻靖,顿向明,缪松华,等.变磁力吸附爬壁机器人的结构设计与爬越焊缝特性.机器人,2011,04:405-410,501.
[10]陈勇,王昌明,包建东.新型爬壁机器人磁吸附单元优化设计.兵工学报,2012,12:1539-1544.
