直升机扭振固有频率测量试验方法
2018-06-23朱文娟姚文荣
朱文娟,姚文荣
(中国航发控制系统研究所,江苏无锡214063)
0 引言
扭振(扭转振动)现象普遍存在于通过轴系扭矩传输功率的系统中,其产生的机理是:轴系传输扭矩时,由于是柔性轴,必然在旋转方向存在弹性扭转形变,当施加于轴系的旋转力矩周期性交变时,轴就会像弹簧一样在旋转方向上往复振动[1-3]。如果策动力矩的交变周期正好与轴系的扭振固有频率相等或为其整数倍,则轴系会不可避免地发生共振[4]。
早期的直升机扭振不会产生任何危害。因为早期的直升机操纵控制和发动机控制是独立控制的。飞行员操控发动机油门改变发动机输出功率,属于飞行员在回路的开环控制[5]。此时,对于旋翼扭振系统而言,不存在迫动力,扭振固有频率虽然存在,但不会对系统产生任何影响。进入FADEC时代后,为提高直升机操控性,以恒定旋翼转速(通常使用动力涡轮转速代替)为控制目标,发动机控制系统通过调节燃油流量,改变发动机的输出功率来调节旋翼转速,即旋翼系统与发动机燃油控制形成闭环控制。旋翼系统的策动力是发动机输出功率,与燃油流量控制相关。当燃油流量控制出现扰动,则其中带扭振固有频率的分量不能被系统吸收,导致掺混固有频率振动分量的转速作为反馈量进入控制系统,燃油流量控制将响应转速波动,并以固有频率开始振荡,该振动相互反复激励且发散,直至系统无法承受[6],产生共振。对于大多数直升机而言,扭振固有频率约为2~5 Hz,正好落在发动机控制系统可以响应的频率带宽范围内[7]。
为避免直升机扭振与发动机燃油系统耦合产生共振,需要采取措施使FADEC不响应直升机扭振的固有频率分量[8]:常规方法是计算并实测扭振系统的固有频率,然后在FADEC中通过滤波的方式将扭振频率带的振幅衰减到FADEC无法响应的程度,以解决共振问题[8]。
本文介绍了扭振频率的已有测量方法,对比分析提出直升机扭振频率测量新方法,并加以验证。
1 直升机扭振固有频率测量及方法
直升机的动力原理简化模型如图1所示。发动机动力输出轴通过主减速器驱动旋翼和尾桨。将发动机动力涡轮输出轴之后的系统命名为旋翼系统,主要包括传动系统、旋翼与尾桨等。旋翼系统相当于1个柔性轴系,受到扭矩的作用会产生一定的固有扭转振动,具有一定的固有频率[9]。如果发动机动力输出轴对旋翼系统所施加的扭矩掺混有此固有频率的波动,则会引起旋翼系统共振。

图1 直升机的动力原理简化模型
直升机扭振固有频率与发动机数量、旋翼转速以及旋翼负载有关。发动机数量影响扭振固有频率的机理如下:每台发动机与传动轴系连接时,都可看作是弹簧与轴系相连,多台发动机与轴系连接就相当于多个弹簧并联,再与轴系相连,根据弹簧并联的原理可知(弹性系数增大,固有频率减小)。因此,在直升机上仅单发带动旋翼时,其固有频率比多发带动旋翼时的固有频率要高。对旋翼传动系统进行复杂的建模,可证实这一观点。
不同旋翼负载下直升机的扭振固有频率也不同。其机理如下:旋翼转速固定,仅总距变化时,旋翼攻角发生改变,旋翼旋转的阻力增加,传动系统的转动惯量增加,相当于弹簧简谐运动模型中的物体质量增加,使得固有频率增大。因此,在旋翼转速一定、总距较小的情况下,扭振的固有频率要低于总距较大时的固有频率。总距保持不变时,由于离心力对动刚度的影响,固有频率将随旋翼转速增加而略有减小,该现象称为“动频”。因此在不同的直升机工作状态下,扭振频率不同,在进行直升机扭振固有频率测量时必须加以考虑。
传统的直升机扭振固有频率测量方法从总距杆处加激励[10],直接引起旋翼系统的振动。如图2所示,在A处脱开总距杆,由虚框中的自动执行机构改变桨叶总距,并在总距信号上叠加不同形式的激励信号。自动执行机构可以通过步进电机等方式实现。整个扭振频率测量试验包括2部分:通过试验找出直升机旋翼系统的1阶固有频率;数控系统设计完陷波器后,验证陷波器是否能够滤除或避开此频率。找出直升机旋翼系统的1阶固有频率的方法是:在动力涡轮转速Np开环控制模式下,分别在单发空慢和双发空慢状态下,通过在总距信号上逐步叠加三角波激励信号[11],诱发与放大其1阶固有频率共振,测量Np和输出轴扭矩Mkp,通过傅里叶变换对测量信号进行频域分析,获得1阶共振频率。验证直升机稳定性的方法是:在Np闭环控制模式下,分别在单发空慢和双发空慢状态下,通过在总距信号上逐步叠加扭振频率点的正弦激励信号,反复测量Np和Mkp,观测其是否稳定在正常控制范围内。扭振测量试验理由是:在桨叶总距上叠加激励,属于强迫振动;发动机Np采取开环控制,不存在发动机控制系统与直升机系统之间的扭振耦合[12-13],避免了系统发生共振的风险。
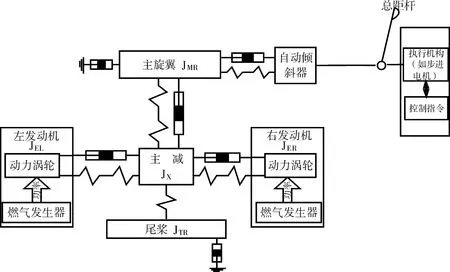
图2 传统的扭振固有频率测量方法
2 扭振固有频率测量的新方法
本文提出1种新的扭振测量方法,直接激励发动机燃油控制系统,用燃油控制系统的波动间接激励旋翼系统的振动,原理如图3所示。
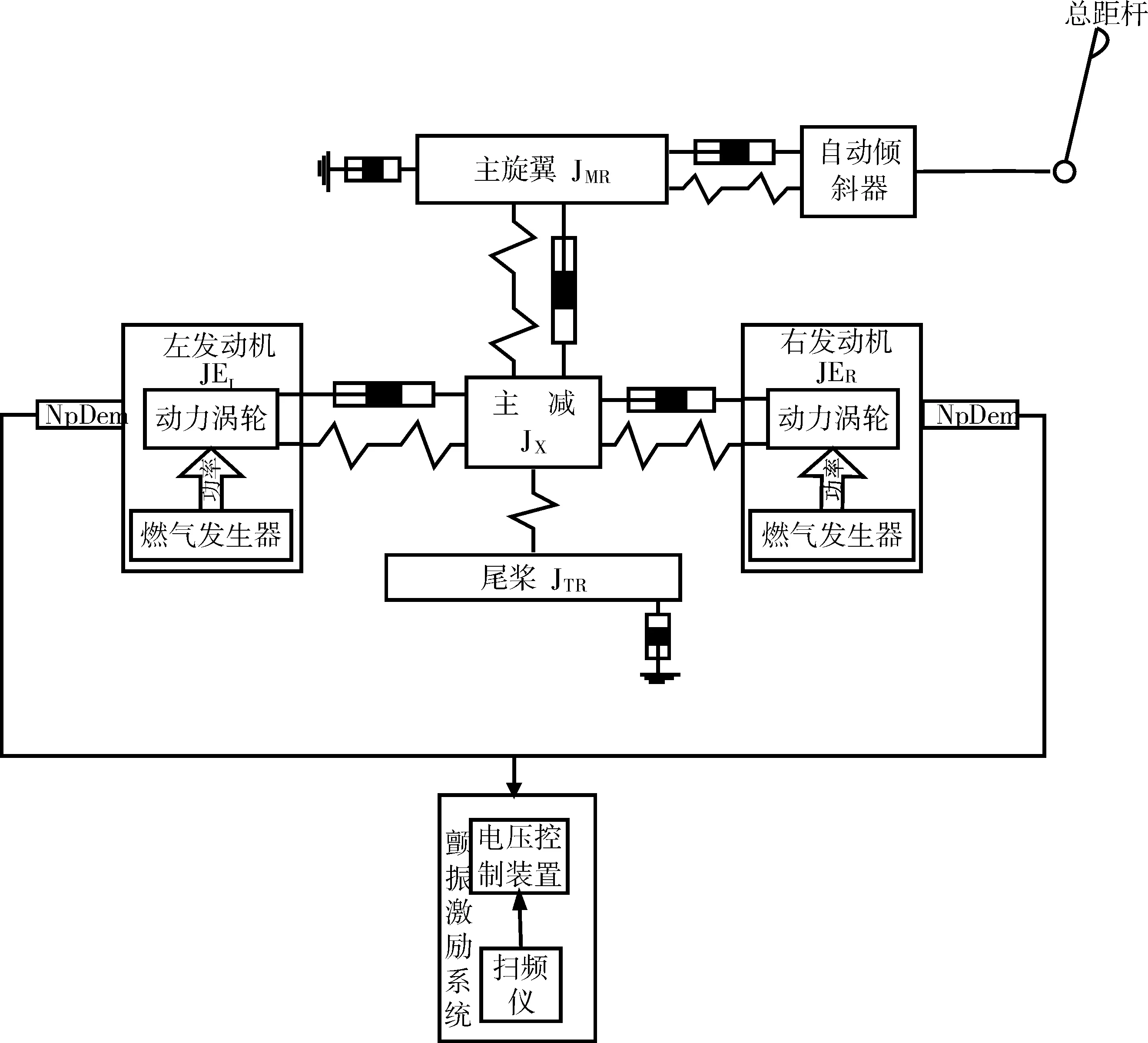
图3 1种新的扭振固有频率测量方法
从图中可见,通过颤振激励系统,直接对FADEC系统中的NpDem信号进行激励。找出直升机系统的1阶固有频率的方法是:在Np闭环控制模式下,分别在单发空慢和双发空慢状态下,通过在NpDem信号上逐步叠加正弦激励扫频信号,Np转速信号相应发生变化,诱发1阶谐振,测量Np和输出轴扭矩Mkp,通过对数据进行频域分析,找出其共振频率点。验证直升机稳定性的方法是:在Np闭环控制模式下,分别在单发空慢和双发空慢状态下,通过在NpDem上逐步叠加正弦激励扫频信号,测量Np和Mkp,观测其是否稳定在正常控制范围内。
本次扭振测量试验可行性的理由是:
(1)发动机输出功率的变化对直升机旋翼系统能够产生迫动力。
从图1中可见,整个直升机旋翼系统有2个外部扭矩变化的输入源:1个是通过总距杆的变化改变旋翼角度引起系统扭振;另1个通过发动机功率改变动力涡轮输出轴扭矩引起系统扭振。传统测量方法为发动机采用燃气涡轮转速Ng闭环控制,输出功率保持不变,通过调节总距杆对旋翼系统产生迫动力。同样,当总距杆角度不变时,采用Np闭环控制使发动机输出功率变化也能对系统产生迫动力。

图4 发动机Np闭环控制原理
(2)在Np闭环控制下,Np转速的变化能够导致能量的积聚。
Np外环控制回路的截止频率在1 Hz以下,NgDot内环控制回路的截止频率为1~2 Hz,燃油伺服小闭环的截止频率为4~5 Hz。当Np转速的波动频率在扭振固有频率(2~5 Hz)范围时,虽然远大于Np控制的截止频率,但是只衰减Np反馈的部分波动,随后传到燃油伺服小闭环,燃油流量响应固有频率的振动。通过增大NpDem激励幅值和延长激励持续时间,Np转速的变化能够使能量积聚,引起直升机系统产生共振的趋势。
(3)测量对象的特性和激励方法不易产生系统共振。
采用发动机Np闭环控制激励的测量方法可能导致发动机控制系统与直升机系统之间的扭振耦合,系统存在共振的风险。本次扭振测量采用Np闭环控制激励的测量而避免系统出现共振风险的原因有2个:直升机旋翼减摆器布置在叶片和轮毂之间,不仅能有效避免地面共振,还能有效抑制摆振,阻尼的存在有效衰减了扭振频率处的Np转速响应,转速幅值变化不大;采用扫频激励方法,严格控制激励幅值与作用时间,使系统出现共振趋势后又能很快恢复。
3 扭振固有频率测量新方法的机上验证
在实际进行扭振固有频率测量时需要对上述方法作一定的修正:
(1)试验需要在单发、双发条件下,旋翼可能运行的转速点,对NpDem进行激励,扫描扭振固有频率;
(2)通过摸底试验得到进行地面扭振激励试验的安全激励信号特征为:扫频时间应最少10 s,幅值1%左右(最大1.5%)。试验结束后,通过频谱分析,找到各状态下的扭振固有频率,并选取合适的频率点用于设计扭振陷波滤波器。
设计完扭振陷波滤波器后,在机上重复扭振激励扫描,以验证扭振陷波滤波器的效果:不会因激振而产生扭振共振。
某型配有双发的直升机针对单发空慢、双发空慢条件进行扭振固有频率扫描。单发空慢的试验结果如图5~8所示。

图6 单发空慢增益0.5幅值1.5%扫频15s扭振激励试验
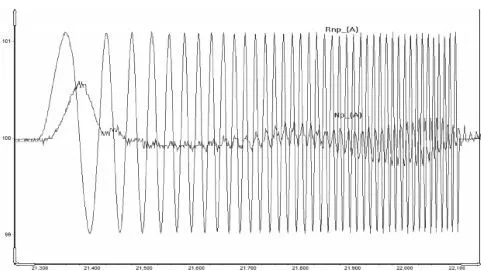
图7 单发空慢增益0.75幅值1%扫频20s扭振激励试验

图8 单发空慢增益1幅值1%扫频20s扭振激励试验
从图5~8中可见,Np回路控制增益越大,Np波动越明显。对图8中的数据进行扭振频率分析可知,Np的响应呈衰减趋势,符合Np大闭环截止频率较低的特点,但在一定的频率范围,衰减程度减弱,说明在这段频率范围内,激励出扭振。因此单发空慢的扭振固有频率应该位于最大波动处,手动测量得该频率落在3.3~3.6 Hz之间,用专门处理工具得单发空慢扭振固有频率为3.417 Hz。
双发空慢下的试验结果以左发试验结果为例,如图9~12所示。

图9 双发空慢左发增益0.25幅值1.5%扫频20 s扭振激励试验

图10 双发空慢左发增益0.5幅值1%扫频20 s扭振激励试验

图11 双发空慢左发增益0.75幅值1%扫频20 s扭振激励试验

图12 双发空慢左发增益1幅值1%扫频20 s扭振激励试验
同样,从图9~12中可见,Np回路控制增益越大,Np波动越明显。用图12中的数据进行双发空慢扭振频率分析,动力涡轮转速的响应全部是衰减的,符合动力涡轮转速大闭环截止频率较低的特点,但在一定的频率范围,衰减程度减弱,说明在这段频率范围内,扭振被激励出来了。因此双发空慢的扭振固有频率应该在波动最大处,手动测量该频率也在3.3~3.6 Hz之间,用专门处理工具得出双发空慢扭振固有频率为3.308 Hz。
扭振固有频率扫描后,分别选取2个固有频率点提供给FADEC进行陷波滤波。以激励幅值为1%、扫频时间为20 s的试验结果,双发空慢以左发试验结果来分析。试验结果如图13、14所示。

图13 单发空慢左发增益1幅值1%扫频20s扭振激励试验

图14 双发空慢左发增益1幅值1%扫频20s扭振激励试验
有无陷波器Np反馈相对给定值衰减情况见表1。

表1 有无陷波滤波前后扭振激励试验情况对比
从表1中可见,加入陷波滤波器后,单发空慢条件下Np衰减增大±0.05%,双发空慢条件下Np衰减增大±0.105%,上述数据表明陷波滤波器未起明显作用,只是稍微增大了Np衰减值。
测量结果表明,采用新的扭振激励方法时,接入陷波滤波器后Np反馈信号与不带滤波器试验的信号相比改善不大。
由上文知,发动机燃油控制系统会引起直升机旋翼系统共振的原因主要有2个:数控系统采用Np恒转速控制,相当于给旋翼系统一个迫动力;存在具有扭振固有频率的燃油流量扰动使Np转速波动,Np通过闭环控制引发燃油流量响应对应频率的波动,最终形成共振。数控系统通过对Np转速信号进行陷波滤波,衰减Np转速中掺混的扭振固有分量,从而避免发动机控制系统与旋翼系统共振。新的扭振激励测量方法直接对NpDem进行激励,从而引起Np转速波动,通过闭环控制引起燃油流量响应形成共振,这种方法容易激起共振。在此方法下,掺杂扭振固有频率的波动的Np反馈信号先通过陷波滤波器进行扭振抑制,然后根据Np闭环控制跟随给定值回到相应大小和频率的波动,陷波效果不明显。从原理上看,这种方法的激励源是NpDem转速信号,只对Np信号进行陷波无法消除迫动力源头的影响,达不到陷波滤波器效果的验证。
在民机适航要求[14-15]中,需要飞行员对直升机进行稳定性检查试验,该稳定性试验即指验证控制系统的陷波器是否能够滤去直升机系统的1阶固有频率。具体方法是飞行员根据“节拍器”按照设定的频率推拉总距杆,以验证直升机及发动机的工作稳定性,传统扭振测量方法即是依据这种总距激励方式进行设计的。综上所述,需要按照民机适航要求的方法进行陷波滤波器效果验证。
4 结论
根据试验所获得的数据分析,得到以下结论:
(1)试验采用Np闭环控制模式下直接激励Np给定值的方法来测量扭振固有频率,试验结果表明这种方法共振效果明显,扭振频率计算简单(通过Np转速波动反映);
(2)某型直升机地面扭振测量试验完成了直升机扭振固有频率的测量,建立了1种直升机扭振固有频率测量的新方法;
(3)新方法的激励源是NpDem转速信号,只对Np信号进行陷波无法消除迫动力源头的影响,达不到陷波滤波器效果的验证。后续可考虑按照民机适航要求的方法进行陷波滤波器效果验证试验。
[1]Valenzuel M A,Bentley J M,Villablanca A,et al.Dynamic compensation of torsional os-cillation in paper machine sections[C]//Pulp and Paper Industry Technical Conference,2005.Conference Record of 2005 Annual:2005.
[2]Muyeen S M,Ali M H,Takahashi R,et al.Blade-Shaft torsional oscillation minimization of wind turbine generator system by using STATCOM/ESS [C]//IEEE Conference on Power Tech,Lasanne,2008:184-189.
[3]M.剌.米里.直升飞机计算和设计:第二卷振动和动强度[M].宁航译.北京:国防工业出版社,1976:42-46.禺.丨.禺鬲丨鼐.兀卅夭卮匕丨卅卮亟 夭亍爻毓卅卮 鬲 乇夭匕卅噩卮鬲夭匕兀亍丿鬲卅[M].Beijing:National Defense Industrial Publishing House,1976:42-46.(in Chinese)
[4]A.P.弗伦奇.振动与波[M]徐绪笃译.北京:人民教育出版社,1981:53-56.A.P.French.Vibrations and waves[M].Beijing:People's Education Press,1981:53-56.(in Chinese)
[5]Sanders John C.Influence of rotorengine torsional oscillation on control of gasturbine engine geared to helicopter rotor[R].NACA-TN-3027 93R13117,1953.
[6]Ruttledge D G C.A rotorcraft flight propulsion control integration study[R].NASA-CR-179574,1986.
[7]Sellers J F,Baez A N.Army/NASA small turbo-shaft engine digital controls research pro-gram[R].NASA-TM-82979,1981.
[8]Delosreyes G,Gouchoe D R.The design of a turboshaft speed governor using modern control techniques[R].NASA-CR-175046 88N10339,1986.
[9]李胜泉,杨征山,孙健国.多滤波器并联方式解决直升机动力传动链扭振耦合[J].航空动力学报,2006,21(3):606-609.LI Shengquan,YANG Zhengshan,SUN Jianguo.Elimination of coupling instability using few parallel connection notch filters for helicopter rotor/power train[J].Journal of Aerospace Power,2006,21(3):606-609.(in Chinese)
[10]黄浩.直升机扭振的固有频率测量机理与方法 [J].动力控制,2013,19(2):15-18.HUANG Hao.The introduction of torsional oscillation natural frequency measurement[J].Engine Control,2013,19 (2):15-18.(in Chinese)
[11]P.M.莫尔斯.振动与声[M].北京:科学出版社,1974:155-169.P.M.Morse.Vibration and sound[M].Beijing:Science Press,1974:155-169.(in Chi-nese)
[12]凌爱民,孙东红.直升机旋翼动力传动链扭振分析与试验[J].直升机技术,2003(2):7-11.LING Aimin,SUN Donghong.Analysis and test of torsional vibration for helicopter rotor/power train[J].Helicopter Technique,2003(2):7-11.(in Chinese)
[13]邵忍平,沈允文,刘更.直升机旋翼传动系统固有振动特性的研究[J].机械科学与技术,1997,16(3):523-525.SHAO Renping,SHEN Yunwen,LIU Geng.Study on dynamic characteristic of transmission system for helicopter rotary wings[J].Mechanical Science Technology,1997,16(3):523-525.(in Chinese)
[14]Landi A,Nicholson M.ARP4754A/ED-79A-Guidelines for development of civil aircraft and systems-enhancements,Novelties and key topics[J].Sae International Journal Of Aero-space,2011,4(2):871-879.
[15]中国民用航空总局.航空发动机适航规定[S].北京:航空器适航审定司,2003.Civil Aviation Administration of China.Aeroengine airworthiness regulation[S].Beijing:Aircraft Airworthiness Approval Department,2003.(in Chinese)
