智能变电站IEEE 1588同步时延优化方法
2018-06-21朱炎平徐志强王凯亮
朱炎平, 陆 俊, 徐志强, 王凯亮
(1. 华北电力大学电气与电子工程学院, 北京市 102206; 2. 国网湖南省电力有限公司岳阳供电分公司, 湖南省岳阳市 414022; 3. 国网湖南省电力有限公司经济技术研究院, 湖南省长沙市 410004)
0 引言
智能变电站是智能电网的支撑节点,其中时间同步系统是保证变电站智能化的关键[1],同步时钟系统所提供的时间精度将决定智能变电站中一次、二次设备的控制精度和控制性能[2]。
IEC 61850标准将智能电子设备的时钟精度功能要求划分为5个等级(T1至T5),其中用于计量的T5等级精度达到1 μs。为此,IEC 61850引入了简单网络时间协议(simple network time protocol,SNTP)和IEEE 1588时间同步协议(以下简称IEEE 1588协议)。SNTP标准同步精度能达到毫秒级,能够满足数字化变电站间隔层设备的对时精度需求[3-4],但达不到IEC 61850标准中T5等级精度要求。与之相比,IEEE 1588协议的同步精度达到亚微秒级,能够满足智能变电站对时间精度的要求[5-6],同时IEEE 1588同步网络具有可以与智能变电站中自动化网络共用的特点,可在站控层网络和过程层网络中直接运行[7-8],因此被广泛应用在智能变电站工程中。
目前,IEEE 1588协议同步优化研究工作主要在时钟路径的非对称和拥塞、频偏及误差累积方面[9-13]。文献[9]通过分析终端队列时延,提出不对称通信路径下的时钟同步补偿算法。文献[10]通过分析时钟偏差变化规律,实现从时钟时间补偿,减少同步周期内从时钟偏差累积。文献[11]通过计算时间窗内主从时钟偏差平均值更新从时钟以减少路径不对称性对时钟精度影响。文献[12]采用延迟分布估计实现分组滤波操作降低拥塞网络下路径延迟波动对IEEE 1588协议时间同步精度的影响。文献[13]采用剔除非对称延迟异常值阈值降低时延补偿误差实现IEEE 1588协议主从同步时钟校正。现有工作对同步通信网络的路径抖动因素尚未加以考虑。
另外,智能变电站应用场景环境复杂,通过交换机构建的时间同步网络与自动化通信网络共存,通常存在路径时延抖动的情况。本文针对主从时钟间路径对称情况,考虑智能变电站IEEE 1588协议时间同步网络下的路径时延抖动同步影响因素,提出一种基于IEEE 1588协议的时延优化时间同步方法。在IEEE 1588协议框架下实现从时钟的基本时钟补偿基础上,拓展时延测量机制获取路径时延抖动的时钟补偿最佳估计值,实现从时钟同步时间的二次时钟补偿以减少路径时延抖动对同步精度的影响。
1 变电站时延抖动同步误差分析
1.1 IEEE 1588协议同步原理
图1所示为IEEE 1588协议同步过程[6],其主要对主从时钟的同步消息通信实现同步控制:在同步周期Ts内,主时钟向从时钟发送同步消息同时从时钟接收同步消息,以此获取四个时间参数T1,T2,T3和T4实现时间同步。
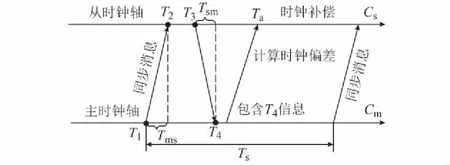
图1 IEEE 1588同步过程Fig.1 IEEE 1588 synchronization process
假设Cs和Cm分别表示主时钟和从时钟的时间,则从时钟偏离主时钟的时钟偏差Td=Cs-Cm。若主时钟到从时钟以及从时钟到主时钟的端端路径时延分别记为Tms和Tsm,则时间参数有如下关系[6]:
T2-T1=Tms+Td
(1)
T4-T3=Tsm-Td
(2)
当路径延时对称(Tms=Tsm)假设条件下,则从时钟的当前第k同步周期时间补偿值Toffset(k)按式(3)计算,有
(3)
设第k-1同步周期从时钟时间标记为Cs(k-1),则当前第k同步周期从时钟时间Cs(k)按照式(4)计算,在如图1中时间时刻Ta进行从时钟的时钟补偿,完成与主时钟的同步操作。
Cs(k)=Cs(k-1)+Toffset(k)=Cs(k-1)+Td
(4)
1.2 路径时延抖动的同步误差分析
智能变电站时钟同步方式包括简单主从时钟同步、端到端透明时钟(end-to-end transparent clock,E2ETC)同步、点到点透明时钟(peer-to-peer transparent clock,P2PTC)同步三种方式(详见附录A图A1所示)。除P2PTC同步方式外,其余两种时钟同步方式的同步精度均受路径时延抖动因素影响,本节讨论简单主从时钟同步和E2ETC同步机制下的时延抖动的同步误差。
智能变电站实际运行环境网络存在时延抖动,即Tms和Tsm并不完全相等,而IEEE 1588协议同步计算是以Tms=Tsm假设前提加以计算的,因此在现有IEEE 1588协议方法同步计算中同步精度将降低,同步误差增加,具体分析如下。
设无时延抖动理想状态下主从时钟间的路径时延为Tb,主时钟到从时钟以及从时钟到主时钟的端端路径时延抖动分别记为εms和εsm,则主时钟的端端路径时延Tms和Tsm可分别表示为式(5)和式(6)。
Tms=Tb+εms
(5)
Tsm=Tb+εsm
(6)
将式(5)和式(6)代入式(1)至式(3),引入当前第k同步周期时延抖动同步误差E(k)(E(k)=(εms-εsm/2);则路径时延抖动条件下,当前第k同步周期从时钟时间Cs(k)表示为:
Cs(k)=Cs(k-1)+Td+E(k)
(7)
比较式(4)与式(7),可得出在时延抖动条件下,IEEE 1588协议同步操作实现了从时钟Td项时钟补偿,但未对时延抖动项E(k)进行时钟补偿。因此,在路径时延抖动条件下,为保证获取稳定且精度高的时间值,应该对时延抖动引起的同步误差项E(k)进行进一步的优化操作。考虑到智能变电站同步协议多采用IEEE 1588协议,因此有必要在IEEE 1588基本同步协议方法框架下上开展延迟抖动同步优化方法,使智能变电站的控制精度和性能得到更好地提升。
2 误差优化时间同步方法
2.1 方法思路
IEEE 1588协议方法只实现了对主从时钟偏差因素采用Td项进行了时钟补偿,未对延迟抖动因素进行从时钟补偿。时钟源在稳定运行条件下,时延抖动εms和εsm在统计理论上服从正态分布[8],本文采用时延抖动εms和εsm服从相同的正态分布假设前提。考虑时延抖动的随机性,该正态分布可表示为N(0,σ),其中均值为0,偏差为σ;根据正态分布性质,则抖动同步误差E服从均值为0,偏差为2σ的正态分布。受信息处理参数估计理论启发,本文通过在同步周期中拓展时延测量机制,进行多次测量操作,按照正态分布估计同步参数,实现对同步误差E(k)的最佳参数估计,获取时延抖动同步误差E(k)的最佳估计值Eopt,实现式(7)的时延抖动项E的时钟补偿,如图2所示。

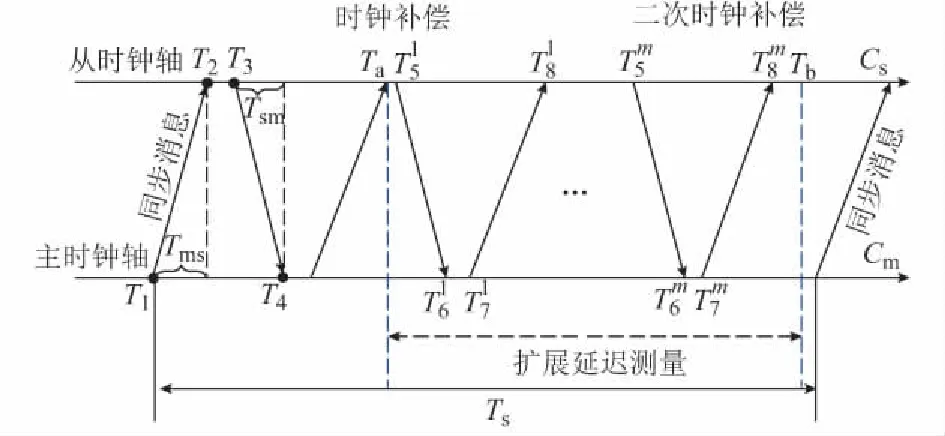
图2 二次时钟补偿的拓展时延测量Fig.2 Extended delay measurement mechanism for second clock synchronization compensation
定义第i次扩展测量时延抖动为Ri,则
(8)
式中:Ei为第i次测量抖动同步误差值;Δti为第i次测量随时间推移产生的时钟偏差,其计算见式(9)。
(9)
由于Ei服从正态分布N(0,2σ),因此可以使用多次平均值来计算时延抖动同步误差E(k)的最佳估计值Eopt,计算如式(10)所示。
(10)
下文采用Eopt实现对从时钟的二次时钟补偿,减少时延抖动因素对同步影响使得从时钟获取更精确时间值。
2.2 误差时间同步方法
误差时间同步方法实现流程如附录A图A2所示,具体步骤如下。
步骤1:在当前第k同步周期内采集T1,T2,T3和T4,计算时间补偿值Toffset(k),采用IEEE 1588协议基本同步实现从时钟的基本时钟补偿。
步骤3:对于基本补偿值Toffset(k)和后续多次时延测量的结果进行筛选过滤[6],过滤规则如式(11)所示,满足时认为结果为有效测量结果。
(11)
式中:Toffset(k-1)为前一次第k-1同步周期时间补偿值,过滤阈值为p(取值范围通常为[0.95,1.05])。若当前第k同步周期内测量所得结果与预测结果偏差较大,则认为该结果Ri存在较大失真(如突发报文拥堵产生的瞬间延迟增大情况)为无效测量结果,计算时该结果将被舍弃。同理,当Toffset(k)使用同样的过滤规则,当其不满足判定规则时也为无效测量结果,此时第k同步周期内Toffset(k)将直接采用Toffset(k-1)进行代替补偿;若同步周期过程中出现连续周期内无效的情况,则同步周期内Toffset(k)将顺序前移选取有效的时间补偿值Toffset(k-j)进行补偿(假设顺序前移到第k-j同步周期)。
步骤4:按照式(10)估计最佳抖动同步误差Eopt,作为时延抖动同步误差E的估计值,其具体过程如下
(12)
式中:n为第k同步周期内m次测量的经过滤所得的有效测量结果的次数,即在计算过程中仅计算有效测量结果;E(k-1)是前一次第k-1同步周期时延抖动同步误差值,记录并使用该值能极大消减拓展测量的次数,减少其对业务的影响,即对于每一次估计而言,将使用前一次测量结果作为对比参考,该值代表了之前一段时间内的抖动平均误差,这样极大削减了当前所需测量的次数;r为比重系数,反映了该参考值所占据的时间宽度,即前次补偿值时间窗口的大小。如此每次测量都相当于一次迭代,首先还原时间窗口内的误差总体水准,再将本次测量结果加入进行误差估计,从而实现大样本的同步误差估计,得到估计值。
步骤5:使用最佳抖动同步误差Eopt,实现当前第k同步周期内从时钟时延抖动的二次时钟补偿操作,完成一个周期同步过程。
步骤6:根据最终同步补偿结果,对从时钟进行频率补偿,使从时钟获得精确的对时时间。
3 实验仿真
3.1 仿真环境与参数设置
为验证方法有效性,按照IEEE 1588协议采用MATLAB搭建E2ETC同步仿真模型[6]。对比方法为IEEE 1588方法[6]和文献[10]所述算法(以下简称Hu方法)。实验按照典型变电站级联拓扑搭建端到仿真实验网络,主从时钟端到端路径包含主时钟到交换机1、交换机1到交换机2、交换机2到从时钟智能组件3段子路径,如附录A图A3所示。
仿真时间为6 000 ms,实验统计时间间隔为1 μs;考虑T5测量精度为1 μs,同步周期设为30 ms,每秒由时钟频率偏差造成的误差为20 μs;参考同步时间实验参数典型值,设主从时钟间通信的基础时延为20 μs,每段子路径为6.67 μs;子路径时延抖动范围为[0,0.33]μs(最大子路径时延抖动为基础时延的5%)。实验中算法参数设置如下:比重系数r为6,重复测量次数n为3,过滤阈值p为5。
3.2 同步过程实验
连续两个周期(第40和41同步周期)的实验同步过程如附录A图A4所示,其中x轴为真实时间,y轴为时钟时间,分别为主时钟时间,三种同步方法的从时钟时间。图A4表明在大的时间尺度下(横坐标时间轴间隔为1 ms),三种方法对应的同步曲线相差不大,说明三种方法都能够基本有效地实现从时钟的时间同步。为比较三种方法的时间同步效果,选择图A4中同步发生时间段采用小时间尺度(横坐标时间轴间隔为0.001 ms)进行描述,如图3和图4所示。
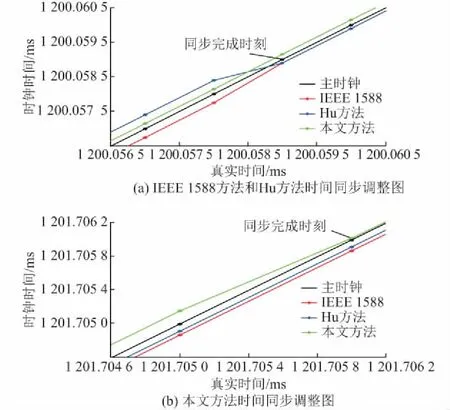
图3 同步精度细节性能对比图Fig.3 Detail synchronization performance comparison diagram
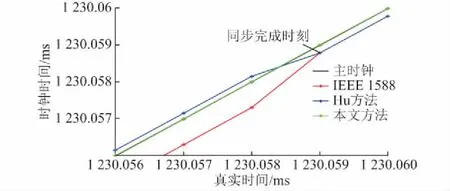
图4 同步累积时钟偏差对比图Fig.4 Synchronization accumulated time deviation comparison diagram
图3为第40同步周期的同步精度细节性能对比图,其中图3(a)为IEEE 1588方法和Hu方法从时钟的时间同步调整过程,图3(b)为本文方法从时钟的时间同步调整过程。 由图3(a)可知,在同步完成时刻,IEEE 1588方法和Hu方法通常具有相同的从时钟与主时钟时钟偏差值,这是由于两种方法采用相同的同步原理。三种方法完成同步后,本文方法时钟偏差值小于IEEE 1588方法和Hu方法,这是由于采用拓展时延测量机制减少了路径时延抖动对同步精度影响,如图3(b)所示。本文方法的同步发生时刻,因采用拓展时延测量机制晚于IEEE 1588方法和Hu方法,但不影响同步效果。
图4为第41同步周期的同步累积误差性能对比,可以发现:在三种方法同步过程中三种方法从时钟与主时钟逐渐产生时钟偏差,该时钟偏差由大到小依次为IEEE 1588方法、Hu方法和本文方法,这是由于本文方法和Hu方法均采用二次校正时间补偿减少了时间偏离。
3.3 同步性能实验分析
为比较三种方法的同步性能,对时间区间为[500,6 000]ms内连续同步周期进行从时钟偏差统计,三种方法对应的从时钟的时钟偏差变化曲线实验结果如附录A图A5所示。由图可知:从时钟偏差的波动范围由大到小依次为IEEE 1588方法、Hu方法和本文方法。为实现同步性能的进一步量化分析,对图A5中的时钟偏差分别进行均值和方差的数学统计,结果如表1所示。
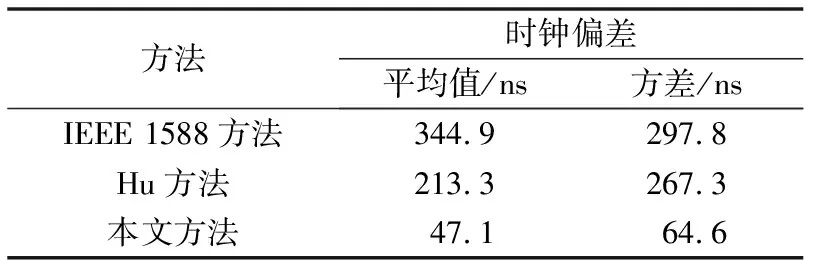
表1 从时钟偏差统计数据Table 1 Slavery clock time deviation statistics data
由表1可知:三种方法时钟偏差的平均值和方差由大到小依次为IEEE 1588方法、Hu方法和本文方法;本文方法的平均偏差仅为IEEE 1588方法的13.66%,为Hu方法的22.08%,同时方差分别为IEEE 1588方法的21.69%和Hu方法的24.17%。以上实验结果表明针对路径时延对称条件的路径延迟抖动同步影响因素,本文方法能够减少路径延迟抖动对同步的影响,同步性能的准确性和稳定性优于IEEE 1588方法和Hu方法。
3.4 突发时延情况下的同步性能分析
针对智能变电站中突发报文产生时延大幅度变化的情况进行仿真,主要分为如下两种情况:①由于突发情况产生大量报文造成的时段内的网络拥塞,通信时延大增;②由于突发报文冲突,导致时延抖动瞬间增大。因此在仿真时段内引入以上两种情况,时钟同步变化结果如附录A图A6所示:图中第60轮到65轮对时同步时发生拥塞,时延抖动一段时间内变化不定,在第100轮时出现了延时抖动瞬间增大的情况。当出现以上情况时IEEE 1588方法、Hu方法都会出现较大的误差,从而不能满足相关业务的要求,而本文方法仍能稳定地实现对时功能。针对两种情况下误差的详细分析结果如表2所示。
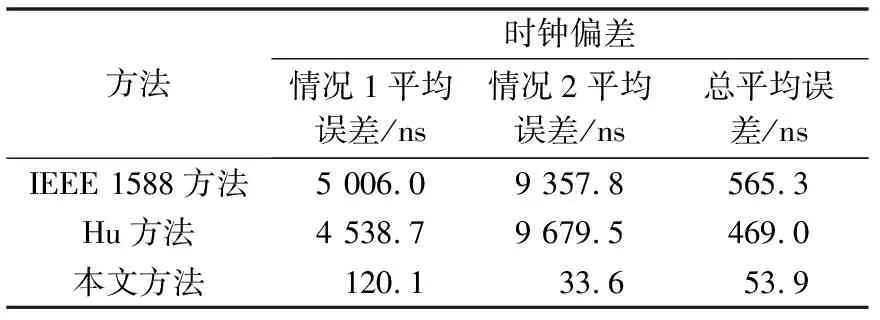
表2 突发时延时从时钟偏差统计数据Table 2 Slavery clock time deviation statistics data
由表2数据可知,相较于IEEE 1588方法、Hu方法,在面对网络环境造成的时延异常变化时,本文方法具有更强的抵抗能力和稳定性。本文方法在针对时延异常变化时,有相应的处理方式,能保持对时同步稳定进行。当出现情况1时,本文方法将根据一段时间前对时结果对长时间的异常对时结果进行调整;当出现情况2时,本文方法能在后续延迟测量过程,对瞬间抖动造成异常结果进行矫正。三种方法整体的平均时延相较于不存在突发时延时分别上升了220.4,255.7,6.8 ns,以上实验结果也证明了本文方法受突发时延影响较小。同时也说明基于频率补偿的精确时间获取受对时补偿准确性的影响较大,当对时补偿值不准确时,频率补偿反而会进一步加大时钟误差,而本文方法通过提高对时补偿值准确性,减少了此种情况的发生。
4 结语
精确的时间同步系统在保证智能变电站业务正常运行中具有重要作用。本文针对IEEE 1588协议在变电站应用部署中出现的路径时延抖动降低同步精度的情况,提出了一种时延优化的时间同步方法,方法能够提高时间同步的准确性和同步稳定性,有助于智能变电站实现稳定的时间同步。实际上智能变电站同步中延时不对称性源于同步通信网络路径的不对称性,这会导致主时钟至从时钟以及从时钟至主时钟的延时抖动的分布也不同,两者并不共享同一个标准差。因此,下一步计划结合智能变电站现场同步部署网络拓扑环境,开展路径时延不对称条件下,时延抖动分布不同的时延抖动同步优化方法研究。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx)。
参考文献
[1] WANG W, LIU M, ZHAO X, et al. Shared-network scheme of SMV and GOOSE in smart substation[J]. Journal of Modern Power Systems and Clean Energy, 2014, 2(4): 438-443.
[2] 刘永欣,易永辉,陶永健,等.智能变电站过程层网络同步对时方案优化[J].电力系统自动化,2015,39(10):112-116.DOI:10.7500/AEPS20140303001.
LIU Yongxin, YI Yonghui, TAO Yongjian, et al. Synchronous optimization scheme of smart substation process level network[J]. Automation of Electric Power Systems, 2015, 39(10): 112-116. DOI: 10.7500/AEPS20140303001.
[3] 李俊刚,刘星,张爱民,等.智能变电站IEEE 1588时钟同步冗余技术研究[J].电力系统保护与控制,2015,43(20):97-101.
LI Jungang, LIU Xing, ZHANG Aimin, et al. Research on redundant technology of IEEE 1588 clock synchronization system in smart substation[J]. Power System Protection and Control, 2015, 43(20): 97-101.
[4] 姜雷,郑玉平,艾淑云,等.基于合并单元装置的高精度时间同步技术方案[J].电力系统自动化,2014,38(14):90-94.DOI:10.7500/AEPS20131008002.
JIANG Lei, ZHENG Yuping, AI Shuyun, et al. A highly accurate time synchronization technology scheme based on merging unit[J]. Automation of Electric Power Systems, 2014, 38(14): 90-94. DOI: 10.7500/AEPS20131008002.
[5] 韩明峰,张丰春,王保齐,等.在线服务在IEC 61850通信配置中的应用探讨[J].电力系统自动化,2016,40(8):114-119.DOI:10.7500/AEPS20150916003.
HAN Mingfeng, ZHANG Fengchun, WANG Baoqi, et al. Discussion on application of online service in IEC 61850 communication configuration[J]. Automation of Electric Power Systems, 2016, 40(8): 114-119. DOI: 10.7500/AEPS20150916003.
[6] Precision clock synchronization protocol for networked measurement and control system: IEEE Std 1588[S]. 2008.
[7] 赵家庆,徐春雷,高宗和,等.基于分布式同步方法的智能变电站采样值组网技术[J].电力系统自动化,2013,37(24):60-65.
ZHAO Jiaqing, XU Chunlei, GAO Zonghe, et al. A networking technology for sampled values in smart substations based on distributed synchronization[J]. Automation of Electric Power Systems, 2013, 37(24): 60-65.
[8] 徐志强,雷雨田,张可人,等.智能变电站中智能组件的时间测试方法[J].电网技术,2011,35(12):8-13.
XU Zhiqiang, LEI Yutian, ZHANG Keren, et al. An approach of time measurement for intelligent components in smart substation[J]. Power System Technology, 2011, 35(12): 8-13.
[9] 钱超,徐迅,梅军,等.应用IEEE 1588的配电网终端队列时延不对称通信路径的时钟同步补偿算法[J].电网技术,2015,39(12):3622-3626.
QIAN Chao, XU Xun, MEI Jun, et al. Communication path queue-induced asymmetry algorithm for clock synchronization on IEEE 1588[J]. Power System Technology, 2015, 39(12): 3622-3626.
[10] 张涛,胡立生.IEEE 1588标准下准确时间值的获取方法[J].化工自动化及仪表,2014(10):1181-1184.
ZHANG Tao, HU Lisheng. Method to get accurate time value with IEEE 1588 standard[J]. Control and Instruments in Chemical Industry, 2014(10): 1181-1184.
[11] 黎锐烽,曾祥君,李泽文,等.IEEE 1588同步时钟网络时延误差的分析及修正[J].电力系统自动化,2012,36(12):82-87.
LI Ruifeng, ZENG Xiangjun, LI Zewen, et al. Analysis and correction methods for network time-delay error of IEEE 1588 synchronization clock[J]. Automation of Electric Power Systems, 2012, 36(12): 82-87.
[12] TAKAHIDE M, YUKIO H, KOSUKE N. A packet filtering mechanism with a packet delay distribution estimation function for IEEE 1588 time synchronization in a congested network[C]// 2011 International IEEE Symposium on Precision Clock Synchronization for Measurement Control and Communication, September 12-16, 2011, Munich, Germany: 114-119.
[13] RAHMAN M A, KUNZ T, SCHWARTZ H. Delay asymmetry correction model for master-slave synchronization protocols[C]// IEEE 28th International Conference on Advanced Information Networking and Applications, May 13-16, 2014, Victoria, BC, Canada: 1-8.
