基于FMCW的近距离测距系统设计
2018-06-19杭州电子科技大学新型电子器件与应用研究所秦会斌
杭州电子科技大学新型电子器件与应用研究所 公 帅 秦会斌
南京电子技术研究所 董胜奎
引言
近距离测距技术是一种探测距离从零点几米到几百米的非接触式探测技术,与目标不直接接触,但与目标联系紧密。
调频连续波FMCW(Frequency Modulation Continuous Wave)雷达具有辐射功率小、测距精度高、设备固化设计简单、具有良好的电子对抗和低截获频率性能等优点。国内外FMCW体制的高精度测距雷达已经广泛应用于汽车防撞、导弹导航、工业测距测量等方面,具有重要的理论研究意义与广阔市场经济前景。本文采用的IVS-162传感器成本低廉,在信号发生与调理电路中运用可编程器件,可根据实际要求调整信号幅度,提高测量精度。
1.FMCW雷达测距系统的基本工作原理
FMCW雷达的基本原理是通过天线向外发射一列连续调频连续波,然后接收目标物体反射回来的反射信号。该反射信号与发射信号混频,得到差频信号。如果被测物体是静止目标,则反射信号在形状上与发射信号相同,只是在时间上有一个延迟;如果被测物体是移动目标,则反射信号中包括一个延迟和一个由相对运动所引起的多普勒频移。
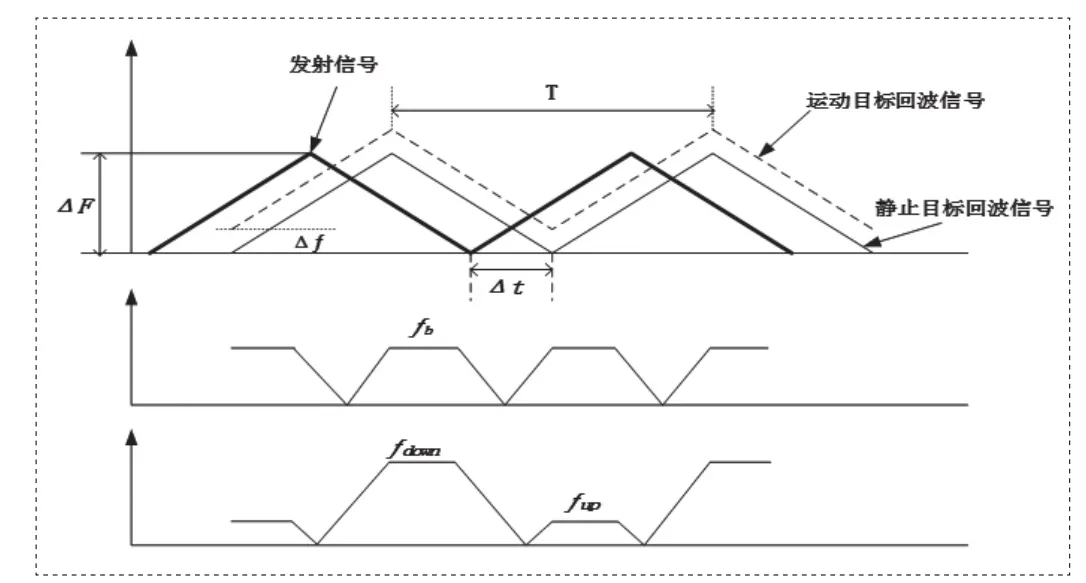
图1 FMCW雷达测距原理
图1 中粗实线表示发射信号,细实线表示静止目标的反射信号,虚线表示运动目标的反射信号。其中发射信号和回波信号频率都按三角波形周期性变化,ΔF(Hz)为调制信号调频带宽,T(s)为调制信号周期,Δt(s)为发射信号与回波信号的信号延时,Δf(Hz)为由相对运动引起的多普勒频移。
由静止目标差频信号与延时信号之间的关系:
可得静止目标的距离公式:

同理,运动目标的距离公式:

分析雷达传感器所输出的差频信号,得到的信息,再根据距离公式,即可得到目标的距离。
2.系统构成
2.1 FMCW雷达测距系统组成

图2 系统框图
本设计的系统框图如图2所示:系统工作时,先由调制发生器产生三角波,控制雷达收发器IVS-162,使其产生射频段的线性调频信号,该信号经被测目标反射后所得到的回波信号再与发射信号进行混频,最终得到包含距离信息的差频信号,将该差频信号经过滤波、增益调整等信号预处理后送入数字转换电路,经AD转换及数字滤波后通过SPI通信接口串行送入FPGA进行数字信号处理,最后将获取的精度较高的频率值进行计算得到被测目标的距离信息。
IVS-162是Innosent公司推出一款K波段雷达收发器,其内部集成了VCO(压控振荡器),使得该雷达收发器能够更简单的应用于工程项目中。由于IVS-162天线的方位角和仰角角度相同,所以在探测目标时能够有效地避免能量衰减。
IVS-162模块主要由三部分组成:信号源部分,混拼输出部分及信号收发部分:
1)信号源部分:包括严控振荡器VCO和供电电源,通过控制三角波信号幅值实现VCO发射信号频率的改变。三角波信号的幅值在0.5V-8V的范围内,调节输入的最大频率不超过150kHz。测量距离10m-20m范围内的近距离目标时,采用频率范围在500Hz~1kHz的调制信号。
2)混频输出信号:信号源产生的三角波控制压控振荡器输出频率为f的发射信号,该信号经过分流一路通过天线发射出去,另一路进入I、Q通道分别与回波信号进行混频,并输出含有目标信息距离的差频信号。
3)信号收发部分:发送部分和接收部分集成在一起,信号的发送与接收路径一致。
2.2 三角波信号生成电路
AD9833是ADI公司的一款低功耗、DDS器件,能够输出多种波形。AD9833无需外接元件,输出频率和相位可通过软件编程设置,失真度低,线性度高,易于调节。通过软件控制AD9833输出三角波,探测近距离目标(0.5m-10m)时采用500Hz的三角波调制信号。
三角波信号发生电路如图3所示。

图3 三角波发生电路
2.3 差频信号处理电路
本系统测量范围为0.5m-50m,回波信号的动态范围比较大,为了将不同强度的信号调整到一定的幅度,需要利用可变增益调整电路对回波信号进行幅度调整。可变增益电路由LMH6505组成,LMH6505是一款高动态范围的低功耗宽带高速可变增益放大器,增益可调整范围为80dB,能够适应一般中高频信号对自动增益控制电路的要求。可以通过DSP与外接稳压电路控制输入电压VG(0V-2V),对增益电路的增益进行调节,使得接收回波信号调整到一定幅值,以便后续AD处理部分能够正常工作,并由AD8051构成带通滤波电路,收集正确的回波信号。差频信号处理电路如图4所示。
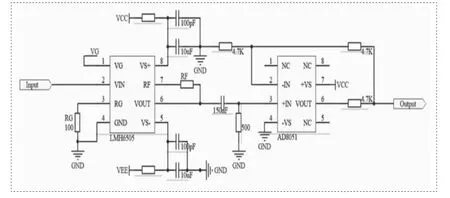
图4 差频信号处理电路
2.4 A/D模数转换ADS8661
DSP不能直接处理模拟信号,经信号调理电路处理的高频信号需经过AD转换成离散的数字信号才能被DSP分析处理。串行A/D转换器体积小,采用串行总线控制,具有节省空间、硬件电路设计简单、可靠性高等优点,所以本设计采用12位串行式数据转换器AD7893。A/D模数转换电路工作流程如图5所示。

图5 A/D转换电路工作流程图
3.系统软件设计与实验结果
根据FMCW雷达的工作原理,要得到物体的距离与速度信息,就必须对差频信号做频谱分析,一般采用的方法是直接对差频信号做快速傅里叶变换(FFT)处理找出峰值谱线位置,再根据峰值谱线位置得到相应频率,利用该频率通过公式计算出目标的距离和相对速度。由于差频信号是分散、不连续的,采用FFT进行频谱分析时很难做到同步采样和整周期截断,因此会产生误差。
为了保证系统的运算精度和运算速度,本系统采用FFT/Chirp-Z联合算法,其基本原理是:首先对差频信号做N点的FFT运算,找出信号峰值位置的大概范围,再对选取范围内的频谱做M点的Chirp-Z变换运算细化频谱,频谱局部细化后得到的谱线峰值点对应的频率值即为差频频率。

表1 实际距离数据与测量距离数据对比
比较表1中数据可知,目标距离越近,系统测量的误差就会越大,在30M-50M范围内,误差相对较小。多次试验证明本系统能在近距离范围内有效测量目标距离,达到预期设计目的,在相关近距离测距应用中有较高的实用价值。
[1]钟鹏.FMCW雷达近程测距系统的设计与研究[D].武汉科技大学,2014.
[2]陈天琪,杨浩,戴志伟等.24 GHz FMCW车载测距雷达系统设计[J].电子技术应用,2016,42(12):37-40.DOI:10.16157/j.issn.0258-7998.2016.12.009.
[3]岳文豹,杨录,张艳花等.FMCW雷达近程测距系统设计[J].电子技术应用,2012,38(4):73-75,79.DOI:10.3969/j.issn.0258-7998.2012.04.023.
[4]朱恺,秦轶炜,许建中等.四种提高FMCW测距精度的方案及性能分析[J].无线电工程,2015,(1):20-25.DOI:10.3969/j.issn.1003-3106.2015.01.06.
[5]安宗营,秦会斌.基于K-LC1a收发器和DSP的近程测距系统设计[J].火力与指挥控制,2016,41(1):157-160.DOI:10.3969/j.issn.1002-0640.2016.01.038.
