LFMCW雷达的差频信号采集系统设计*
2017-08-09王斯盾涂亚庆牟泽龙闫隆基
王斯盾, 涂亚庆, 牟泽龙, 闫隆基, 刘 鹏
(后勤工程学院 后勤信息与军事物流工程系,重庆 401311)
LFMCW雷达的差频信号采集系统设计*
王斯盾, 涂亚庆, 牟泽龙, 闫隆基, 刘 鹏
(后勤工程学院 后勤信息与军事物流工程系,重庆 401311)
差频信号采集系统是线性调频连续波(LFMCW)雷达的核心部件之一。针对国产某新型LFMCW雷达传感器,设计并实现了基于C8051F120的LFMCW雷达差频信号采集系统,包括调制信号产生模块、差频信号采集模块以及串口通信模块。主要实现的功能有:产生非线性校正后的锯齿波调制信号;采集雷达差频信号并搭建二阶有源带通滤波器进行放大滤波;发送差频信号至上位机等。实验验证了LFMCW雷达差频信号采集系统的有效性。
线性调频连续波雷达; 差频信号; 采集系统; C8051F120
0 引 言
线性调频连续波(linear frequency modulated continuous wave,LFMCW)雷达具有时宽带宽积大、最小测量距离近、测量精度高,受自然环境因素影响小等特性。常用于物位、液位的测量。LFMCW雷达一般由24 GHz或77 GHz雷达传感器、信号采集及处理系统、信号处理算法及应用软件三部分构成。目前,LFMCW雷达设计主要朝着小型化和精确化的方向发展,但由于雷达传感器核心技术由国外垄断,国内将研究的突破口一般放在信号采集系统与信号处理算法上[1~3]。
针对LFMCW雷达的研究现状,本文设计并实现了LFMCW雷达的差频信号采集系统,包括调制信号产生模块、差频信号采集模块以及串口通信模块,旨在为后端的雷达信号处理算法研究与二次仪表开发提供稳定、可靠的原始信号支持。
1 LFMCW雷达测距原理及信号采集系统方案
1.1 LFMCW雷达测距原理
以测距为例,在调制信号为锯齿波的情况下,LFMCW雷达发射信号、回波信号时频图如图1所示。
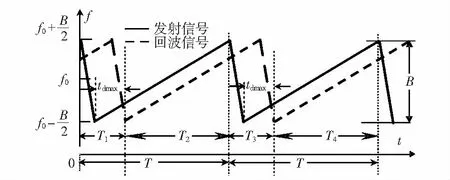
图1 发射信号与回波信号时频图
其中,f0,B,T分别为发射信号的调频中心频率、调频带宽、调频周期;μ=B/T为锯齿波调频斜率;tdmax为发射信号和回波信号的时延。因此,将一个调频周期T分为非规则区(时宽为T1)和规则区(时宽为T2)。在非规则区内,差频信号频率急剧下降至零,难以从中提取距离信息;在规则区内,差频信号频率fBS(t)为一个单频正弦信号,计算得到公式
(1)
式中 R为测量距离;c为电磁波速度[4]。
1.2 差频信号采集系统方案
差频信号采集系统是LFMCW雷达的核心部件之一,其整体设计方案如图2所示。设计以单片机为核心,控制D/A转换器产生调制信号,驱动雷达传感器产生差频信号,通过有源带通滤波器对差频信号进行放大滤波,再经过A/D转换,最后,利用串口将滤波后的差频信号传送到上位机。
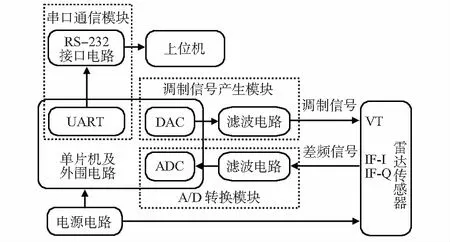
图2 信号采集系统硬件结构
单片机C8051F120为核心处理器,主频速度高达100 MHz,具有12位数模转换器(digital to analog converter,DAC),可编程更新数据;12位100 kSPS的ADC;128 kB FLASH存储器, 可在系统进行编程;8448B的片内RAM;5个通用16位的计数器/定时器;2个全双工UART。
设计采用国产新型高性能24 GHz LFMCW雷达传感器。该雷达传感器采用单片微波集成电路(MMIC)压控振荡器(VCO)设计,最高具有500 MHz高线性调频带宽,输出功率为 23 dB·m,雷达天线波束角度(-3 dB)10°×10°,雷达天线波束旁瓣抑制优于-19 dB。其VCO调制信号电压与发射频率曲线如图3所示。
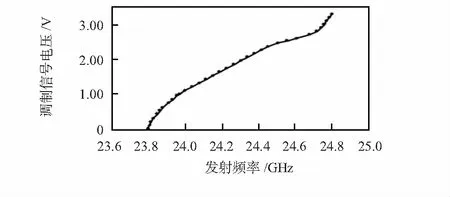
图3 调制信号电压与发射频率曲线
由图3可知,当调制信号电压在1.20~2.46 V之间,发射信号线性度较好,发射频率为24.040~24.505 GHz,调频带宽B=465 MHz。
2 功能模块设计
2.1 调制信号产生模块
雷达前端VCO一般具有非线性,利用标准锯齿波作为调制信号输出的连续波频率往往不成线性变化[5]。为了改善VCO输出信号的线性度,需要对雷达前端进行开环校正或闭环校正。工程中普遍采用开环校正,即根据调制信号电压与发射频率的关系,采用非线性的调制电压信号,抵消VCO 的非线性影响[6,7]。本文采用C8051F120片内DAC,将经过非线性校正的锯齿波波形数据存储到Flash中,运用直接数字频率合成(DDS)的原理,生成经过非线性校正后的调制信号,从而提高发射信号的调频线性度。
1)频率分辨率
在给定了DAC的采样速率fs后,可以确定调制信号频率分辨率为fs/216。采样速率通过定时器周期寄存器值(PRD)设置,可由式(2)计算该值
fs=-S/P
(2)
式中S为系统时钟,由于C8051F定时器是向上计数的,因此,该数值是负数;P为定时器周期寄存器值。
2)产生波形
锯齿波产生在定时器中断服务程序(ISR)中完成,使用一个16位的相位累加器,分3级实现。每次调用定时器ISR时,相位累加器的值增加一个PHASE-ADD,同时查表寻找下一个DAC输出值。PHASE-ADD的大小根据式(3)计算得出
(3)
式中 f为锯齿波频率; fs为DAC的采样速率。
3)放大滤波
DDS输出信号的频谱里一般包含理想输出频率、高频干扰和DDS数字杂散,因此,需要进行滤波处理[8]。DAC生成的锯齿波信号首先经过低通滤波器(LPF),滤除其中的高频干扰,然后,利用放大器OP284将信号放大。放大电路的输出直接作为雷达前端的调制信号输入,其电路如图4所示。
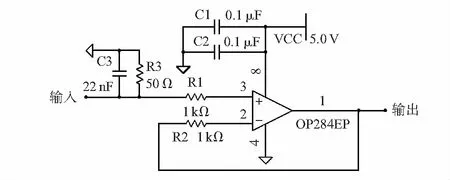
图4 调制信号滤波电路原理图
2.2 差频信号采集模块
由雷达方程可知,LFMCW雷达测量的距离与差频信号的功率成4次方的关系,当测量距离较远时,有用信号往往被淹没在噪声信号之中[4]。同时,差频信号中含有固定频率的锯齿波调幅信号干扰,直接进行频率估计误判几率较高[9],因此,需要对差频信号进行滤波处理。
本设计理论测距范围R为2~20 m,调制信号带宽B=465 MHz,扫频周期T=4 ms,由式(1)计算可知,差频信号最低频率为fBS(min)=1.55 kHz,最高频率为fBS(max)=15.50 kHz。设计采用双运放NE5532,搭建了二阶巴特沃斯有源低通滤波器和高通滤波器,然后通过低通滤波器与高通滤波器级联的方式构成带通滤波器,电路如图5所示。
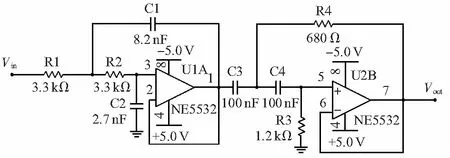
图5 差频信号滤波电路原理图
带通滤波器通带范围为1.55~15.5 kHz,放大倍数为1倍,2倍频衰减24 dB,满足差频信号滤波需求。
按照奈奎斯特采样定理,工程上一般选取3~5倍进行采样,故采样率fADC=15.5 kHz×5=77.5 kHz,即,ADC采样率大于 77.5 kSPS即可满足需求。ADC转换位数一般选择12位即可。参考电压采用内置参考电压或者外置高精度的参考电压。综合考虑系统需求和成本,选择C8051F120内置 ADC可以满足系统需要。同时,通过内置ADC模块的直接存储器访问(DMA)传输通道可以在不占用CPU运行周期的情况下将数字信号存储到单片机内置的SRAM存储器中。与目前大部分的雷达差频信号采集系统采用外置的ADC模块和外置的SRAM存储器,以及外加FPGA实现FIFO的方案相比,本文设计的差频信号采集模块结构简单,成本较低,可靠性更高。
2.3 串口通信模块
设计通过C8051F120的通用异步收发传感器(UART)连接TRSF3221E,实现TTL电平到RS—232电平的转换。只需连接发送信号线、接收信号线和地线即可实现全双工通信,硬件电路如图6所示。
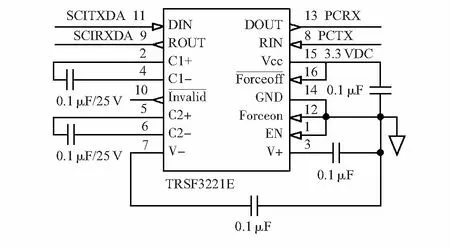
图6 RS—232电平转换电路
3 系统实验
为了验证设计的LFMCW雷达差频信号采集系统的有效性,对调制信号源、差频信号滤波电路进行了测试实验。
3.1 调制信号源实测实验
实验参数设置为:采样速率为80 kHz;存储波形为VCO经过非线性校正后的512点锯齿波;调制信号电压在1.20~2.46 V,峰—峰值电压为1.26 V,频率为250 Hz。图7给出了该参数下调制信号在示波器上的波形。

图7 调制信号实测波形
3.2 差频信号采集实验
采用上述实验产生的调制信号驱动前端雷达传感器,产生的差频信号经过滤波放大,AD采样,由串口传输到上位机。实验参数为:测量距离2.8 m;调制信号频率250 Hz;调频带宽465 MHz。采集得到滤波前的差频信号波形及频谱如图8所示。滤波后的差频信号波形及频谱如图9所示。
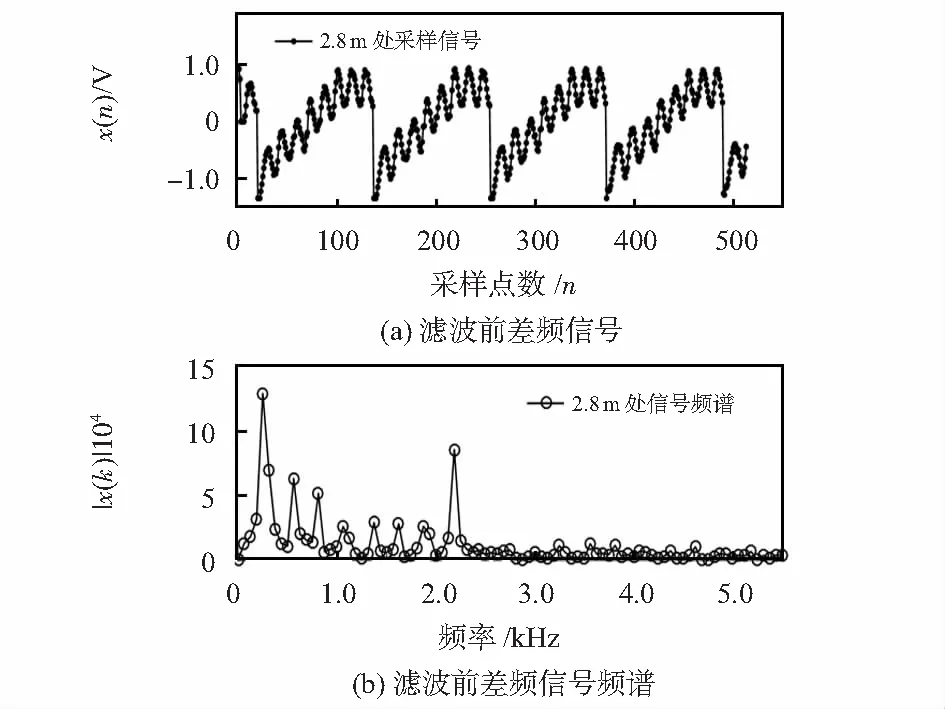
图8 滤波前的差频信号及频谱
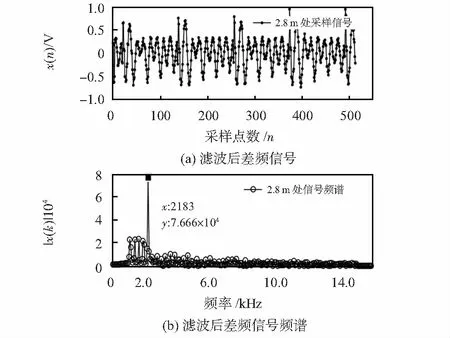
图9 滤波后的差频信号及频谱
由图8可以看出,由于没有经过任何信号调理,雷达差频信号在低频部分有明显的锯齿波调幅干扰,同时有大量高频噪声,难以直接从差频信号中提取有用信息。
由图9可以看出:经过滤波放大处理后,调制信号干扰、高频噪声基本消除,差频信号较为纯净,规则区、非规则区明显,后期算法研究,提取有用信息几乎无干扰影响。但同时也可以看到,通带内信号能量也有一定衰减。
4 结束语
本文设计并实现了基于C8051F120的LFMCW雷达差频信号采集系统。该系统采用直接数字频率合成的方法,产生经过非线性校正后的调制信号,驱动某国产新型24 GHz LFMCW雷达传感器。针对雷达传感器输出差频信号的特点,搭建了二阶有源巴特沃斯带通滤波器进行滤波处理,为后期从差频信号中提取尺寸、形状、方向、距离和速度等信息提供了高质量的原始信号支持。经过实验验证:系统结构简单,成本较低,实用性较强,极大地方便了雷达信号处理算法研究与二次仪表软件开发。
[1] 涂亚庆,杨辉跃,张海涛,等.复杂信号频率估计方法及应用[M].北京:国防工业出版社,2016.
[2] Lin J J,Li Y P,Hsu W C,et al.Design of an FMCW radar baseband signal processing system for automotive application[J].Springer Plus,2016,5(1):1-16.
[3] Tu Y Q,Shen Y L.Phase correction autocorrelation-based frequency estimation method for sinusoidal signal[J].Signal Processing,2016,130:183-189.
[4] 丁鹭飞,耿富录,陈建春.雷达原理 [M].5版.北京:电子工业出版社,2014.
[5] Hong J,Cheon C.Simple VCO nonlinearity correction algorithm based on EMD in FMCW radar system[J].Electronics Letters,2016,52(17):1484-1486.
[6] 陈林军,涂亚庆,刘 鹏,等.基于DSP+FPGA的LFMCW雷达测距信号处理系统设计[J].传感器与微系统,2015,34(12):94-96.
[7] 汪 红,张 杰,张大彪.调频连续波(FMCW)雷达信号调理电路[J].仪表技术与传感器,2012(1):105-107.
[8] 邓耀华,吴黎明,张力锴,等.基于FPGA的双DDS任意波发生器设计与杂散噪声抑制方法[J].仪器仪表学报,2009,30(11):2255-2261.
[9] 刘贵如,周鸣争,陈效华,等.基于连续波毫米波雷达的车辆开门防撞预警技术[J].江苏大学学报:自然科学版,2015,36(6):634-640.
Design of beat signal acquisition system for LFMCW radar*
WANG Si-dun, TU Ya-qing, MOU Ze-long, YAN Long-ji, LIU Peng
(Department of Logistics Information & Logistics Engineering,Logistical Engineering University,Chongqing 401311,China)
Beat signal acquisition system is one of the core components of linear frequency modulated continuous wave(LFMCW)radar.A LFMCW radar beat signal acquisition system based on C8051F120 is designed and implemented for a new LFMCW radar sensor,which includes modulation signal generation module,beat signal acquisition module and serial communication module.It can complete the functions such as the generation of non-linear correction of the sawtooth wave modulation signal;radar beat signal acquisition and build a second-order active bandpass filter for amplification;sending beat signal to the host computer and so on.The experimental results verify the effectiveness of the LFMCW radar beat signal acquisition system.
linear frequency modulated continuous wave(LFMCW)radar; beat signal; acquisition system; C8051F120
10.13873/J.1000—9787(2017)07—0093—03
2017—05—08
国家自然科学基金资助项目(61271449,61302175);重庆市自然科学基金资助项目(CSTC2015JCYJBX0017);重庆市首批百名学术学科领军人才专项项目(渝教人2012—44号)
TP 274
A
1000—9787(2017)07—0093—03
王斯盾(1993-),男,硕士研究生,研究方向为智能检测与智能控制,E—mail:danube.live@qq.com。
