超声点聚焦探头在球体中的声束发散与聚焦
2018-06-19濮海明康宜华
濮海明 王 哲 康宜华
华中科技大学机械科学与工程学院,武汉,430074
0 引言
超声点聚焦探头具有非接触检测、灵敏度高以及信噪比高等优点,已被应用于钢球表面的无损探伤[1],但是在探头的聚焦区范围外,检测灵敏度下降很快,检测效果甚至可能不如其他探头。
由超声波从耦合剂入射到检测工件会发生折射的声学现象可知,聚焦声束进入球体后的焦点会发生变化。能否准确找到点聚焦探头在球体中的实际焦点位置,对探伤的操作过程以及探伤结果影响较大,甚至会影响探伤结果的可靠性。目前,已有专家学者对聚焦探头在平面工件中形成的实际焦点位置进行研究[2-3],但针对点聚焦探头在球体工件中的实际焦点位置并未展开相关研究,因此,准确判断点聚焦探头在球体中的实际焦点位置对指导工程应用具有重要意义。
针对上述问题,本文对超声点聚焦探头在球体内的声束发散与聚焦情况展开研究。
1 超声点聚焦探头的原理及结构
超声点聚焦探头的设计依据:平面波从声波传播速度较大的介质中入射到传播速度较小的介质中时,其折射波将发生聚焦作用,见图1(c1、c2表示介质中声波的传播速度)。

图1 平面波在曲面上的折射(c1>c2)Fig.1 Refraction of plane wave on curved surface
超声点聚焦探头的结构见图2,主要由声透镜、压电晶片、阻尼块、电缆线、接头以及外壳组成,由压电晶片产生平面波并接受超声回波信号,声透镜的作用是实现超声波束的聚焦[4]。

图2 超声点聚焦探头结构Fig.2 Structure of ultrasonic point focusing probe
2 球体中焦距变化的理论分析
本文主要分析点聚焦探头在球体中的焦距变化[5-6],对于超声波入射到耦合剂与工件交界面时发生的反射以及波形转换等现象不作研究。
2.1 探头焦点位于球体外的理论分析
图3中,A点为入射点,F点为焦点,O点为球体的中心点。如图3a所示,当点聚焦探头的焦点位于球体上方时,聚焦声源边缘声束线的入射角α明显大于入射点法线与球体中心轴线的夹角θ(α=θ+∠OFA),根据斯奈尔定律:

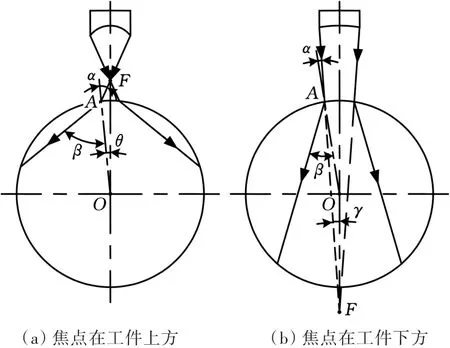
图3 探头焦点在球体外Fig.3 Theoretical focus of probe out of sphere
式中,ca为耦合剂中声速;cs为检测工件中声速;β为折射角。结合常用耦合剂和一般检测工件的超声传播速度之间的关系(ca<cs),有 β>α>θ,因此,进入球体内部的超声波不再具有聚焦的特性,反而形成发散声束。
如图3b所示,当点聚焦探头的焦点位于球体下方时,在△AOF中:

式中,R为球体的曲率半径;γ为聚焦声源边缘声束线与球体中心轴线的夹角。
由式(1)和式(2)可得

由于 R/|OF|<1,cs/ca>1,所以 β>α>γ。同样,进入球体内部的超声波形成发散声束。
2.2 探头焦点位于球体内的理论分析
2.2.1 探头焦点在球体中心点上方
点聚焦探头的焦点位于球体中心点上方时的声束传播路径见图4。

图4 探头焦点在球体中心点上方Fig.4 Theoretical focus of probe above the center of sphere
图4中,F′为点聚焦探头在球体中的实际焦点,a为水层厚度,b为实际焦点与工件表面的距离,e为实际焦点与焦点之间的距离,d为焦点距工件中心点的距离,f为焦距,f′为实际焦距,D为点聚焦探头晶片的直径。
在△AOF中:

在△AOF′中:

在△AFF′中:

由图4可知 θ=γ-α,结合式(4)和式(5)可以得到
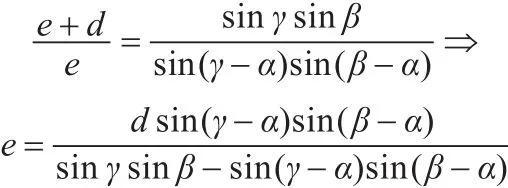
由式(1)可得

由式(3)可得

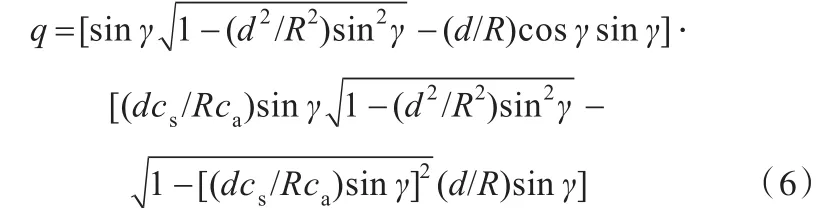
令

由α、β、γ三者之间的相互关系,可以得到q关于γ的表达式:
最终点聚焦探头焦点与探头在球体中实际焦点之间的距离e可以表示为

将式(7)代入 f′=f-e,可得

由此得到点聚焦探头的焦点位于球体中心点上方时,探头在球体中实际焦距的表达式。在实际应用过程中,已知条件一般有水层厚度a、工件曲率半径R、点聚焦探头焦距f、点聚焦探头晶片直径D以及检测工件和耦合剂中的声速。根据已知条件可以求出d与γ:

代入式(8)即可求出点聚焦探头在球体中的实际焦距。
2.2.2 探头焦点与球体中心点重合
当点聚焦探头的焦点与球体的中心点重合时,点聚焦探头的声束线与入射点法线重合,因此,点聚焦探头在球体中的实际焦距就是探头的焦距值。
2.2.3 探头焦点在球体中心点下方
点聚焦探头的焦点位于球体中心点下方时的声束传播路径可以分为以下3种情况。
(1)点聚焦探头边缘声束线的折射角 β大于边缘声束线与球体中心轴线的夹角γ时,根据上文分析可知,进入球体内部的超声波形成发散声束,不再聚焦。声束传播路径见图5a。
(2)点聚焦探头边缘声束线的折射角 β小于边缘声束线与球体中心轴线的夹角γ,但在球体内部的声束线尚未形成聚焦就已经到达球体与耦合剂的交界面。此时,在球体内部未形成声束焦点,因此,对这种情况不作分析研究,认为其形成发散声束。声束传播路径见图5b。
(3)点聚焦探头边缘声束线的折射角 β小于边缘声束线与球体中心轴线的夹角γ,并且球体内部的声束线形成聚焦,即点聚焦探头在球体内部产生实际焦点。声束传播路径见图6。

图5 探头焦点在球体中心点下方(不存在F′)Fig.5 Theoretical focus of probe below the center of sphere(withoutF ′)

图6 探头焦点在球体中心点下方(存在F′)Fig.6 Theoretical focus of probe below the center of sphere(withF ′)
分析步骤与前文中探头焦点在球体中心点上方时相同。在已知 a、R、f、D、cs、ca的条件下,可以求出d与γ,d=a+R-f,当探头焦点在球体中心点上方时,d值为正;探头焦点在球体中心点下方时,d值为负,sin γ=D/(2f),代入式(8)即可求出点聚焦探头在球体中的实际焦距。计算得到的β与f′应该满足条件:

3 球体中焦距变化的仿真研究
本文通过有限元分析软件[7]建立点聚焦探头在球体中焦距变化的瞬态仿真模型,分析仿真结果,与上文理论结果进行对比。
3.1 仿真模型
仿真模型中选用中心频率为5 MHz、晶片直径D为8 mm、水中焦距 f为21 mm的点聚焦探头,工件的曲率半径R为18 mm,水层厚度a为10 mm。耦合剂与检测工件的材料参数取值于有限元分析软件的材料库,具体数据见表1。

表1 仿真模型中的材料参数Tab.1 Material parameters of simulation model
根据仿真模型的已知条件,将相关参数代入理论公式进行计算,计算得到的主要数据见表2。

表2 理论计算结果Tab.2 Theoretical calculation results
有限元分析软件建立的仿真模型见图7,耦合介质与球体的交界面的上半部分设置为声固耦合边界,球体的其他边界设置为弱反射边界。
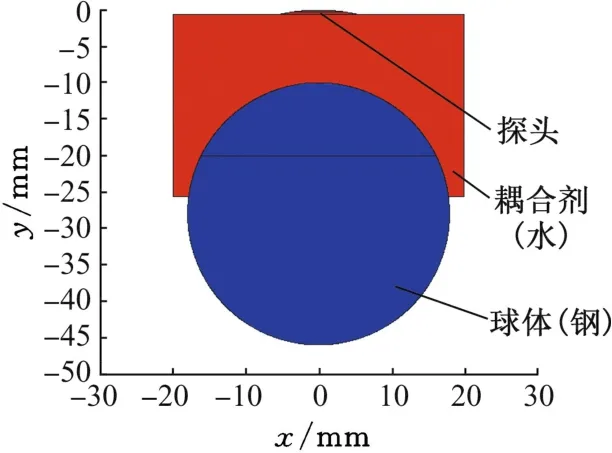
图7 仿真模型Fig.7 Simulation model
超声脉冲信号的发射过程是在半径为f的圆弧上加载法向位移边界条件实现,边界加载信号为Gabor函数类型,表达式为2

式中,f(t)为加载信号;A为信号归一化幅值;T0为脉冲中心频率对应的周期;f0为探头中心频率。
3.2 仿真结果
瞬态模型仿真结束后,提取每个步长的瞬态位移数据,其中时间点 tp=0,1,2,3,4,6 μs的提取结果见图8。
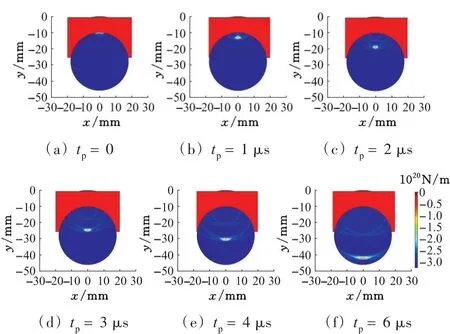
图8 不同时间点的位移图Fig.8 Displacement diagram at different time
将仿真结果中每个步长的瞬态位移数据进行简单叠加即可得到表示声波传播过程中的声束剖面图(图9)。提取图9中最大值点的坐标得到球体内部的实际焦距为14.80 mm,仿真结果与理论计算得到的结果基本一致。
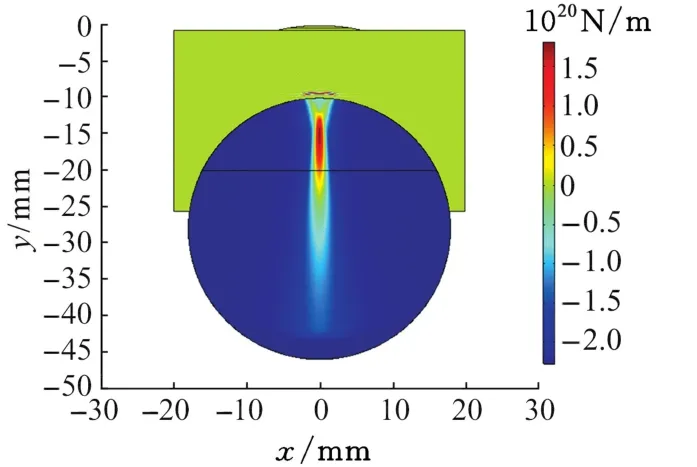
图9 声束剖面图Fig.9 Profile of sound beam
4 不同规格钢球的水层厚度选择
实际工程应用中,超声点聚焦探头往往用来检测钢球的内部缺陷,在进行钢球内部缺陷检测实验时,通常采用人工平底孔进行相关实验,因为金属外层的人工平底孔是评价超声检测方法对内部缺陷检测能力的方式之一。因此,对不同半径的钢球,选择合适的聚焦探头和水层厚度对提高检测精度具有重要意义。聚焦探头晶片尺寸的选择需要根据不同的材料和钢球半径确定,同时确定尺寸的晶片能适应一定半径范围的钢球。当确定了点聚焦探头型号时,需要选择合理的水层厚度,将探头在钢球内部形成的实际焦点位置调节到钢球的底部上,即式(8)满足

水层厚度的确定还需要满足以下2个原则:
(1)确保二次界面回波出现在钢球一次底波之后的位置,即满足

因为水层厚度过小时,二次界面波、三次界面波等多次界面回波信号就会出现在一次底波之前的位置,对缺陷回波信号造成误判。
(2)为了尽可能减小超声波在水层中的能量损失,不能选择过大的水层厚度。根据工程应用中的实际经验,水层厚度一般满足
以仿真模型中的点聚焦探头(中心频率为5 MHz,晶片直径D为8 mm,水中焦距f为21 mm)为例,结合上述水层厚度的选择原则,计算得到不同规格钢球的水层厚度参数(表3)。
为了验证理论分析与仿真结果的可靠性,设计了钢球底波信号的幅值比较试验。以12 mm半径的钢球作为实验对象,选用仿真模型中的点聚焦探头型号,水层厚度分别为4.5 mm、7.3 mm、10 mm,得到的钢球回波信号见图10。

表3 不同规格钢球的水层厚度参数Tab.3 Water layer thicknesses under different sphere specifications mm
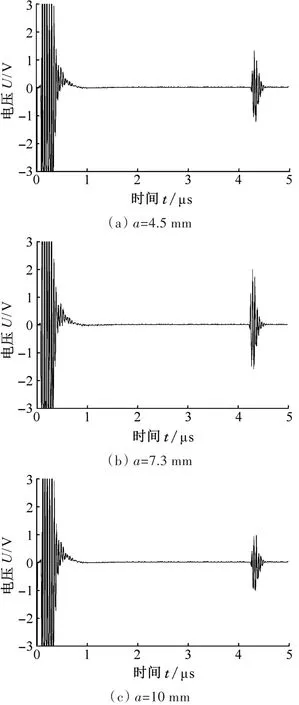
图10 不同水层厚度的钢球回波信号Fig.10 Sphere echo signal under different water layer thicknesses
实验结果表明:水层厚度为4.5 mm、10 mm时,钢球底波信号的幅值明显比水层厚度为7.3 mm时的信号幅值要小。因此可以认为当水层厚度为7.3 mm时,点聚焦探头在钢球底部形成聚焦区,由于聚焦区域的能量更集中,所以得到的钢球底波信号幅值较大。实验现象验证了理论分析与仿真结果的可靠性。
5 结论
(1)超声点聚焦探头的焦点位于球体外部时,进入工件内部的超声波形成发散声束,不再聚焦。超声点聚焦探头的焦点位于球体内部且处于工件中心上方时,超声波在工件内部形成聚焦声束,分析计算得出了实际焦距的表达式,且实际焦距小于探头焦距。超声点聚焦探头的焦点与球体中心重合时,实际焦点不发生变化。超声点聚焦探头的焦点位于球体内部且处于工件中心下时,若点聚焦探头边缘声束线的折射角大于边缘声束线与球体中心轴线的夹角,则工件内部的声束发散;若点聚焦探头边缘声束线的折射角小于边缘声束线与球体中心轴线的夹角,但在球体内部的声束线尚未形成聚焦就已经到达球体与耦合剂的交质界面,则认为工件内部的声束发散;若点聚焦探头边缘声束线的折射角小于边缘声束线与球体中心轴线的夹角,且在球体内部的声束线形成聚焦,根据实际焦距的表达式,可知实际焦距大于探头焦距。
(2)利用有限元分析软件建立点聚焦探头在球体中焦距变化的瞬态仿真模型,仿真结果与理论计算得到的结果基本一致。
分析计算得出的实际焦距表达式对实际应用过程中的点聚焦探头选型和水层厚度等参数的确定具有参考价值。
[1] 徐淑琼,蒋沂萍.轴承球缺陷的超声波检测方法[J].机械制造与自动化,2005,34(5):44-49.XU Shuqiong,JIANG Yiping.Ultrasonic Testing for Bearing Balls with Defects[J].Machine Building&Automation,2005,34(5):44-49.
[2] 卞伟,谢航云.超声波聚焦检测焦距的探讨[J].宁夏电力,2005(增):286-288.BIAN Wei,XIE Hangyun.Discussion on Focusing Distance of Ultrasonic Focus Detection[J].Ningxia Electric Power,2005(s):286-288.
[3] SEOK C,SCIENCE K,KIM Y H.Development of Variable Focal Length Ultrasonic Transducer by Changing Curvature of PVDF[J].Proceedings of Symposium on Ultrasonic Electronics,2014,35:241-242.
[4]《国防科技工业无损检测人员资格鉴定与认证培训教材》编审委员会.国防科技工业无损检测人员资格鉴定与认证培训教材:超声检测[M].北京:机械工业出版社,2009:159-163.The Editorial Board of Training Materials for Qualification and Certification of NDT Personnel in National De-fense Science and Technology Industry.Training Materials for Qualification and Certification of NDT Personnel in National Defense Science and Technology Industry:Ultrasonic Testing[M].Beijing:China Machine Press,2009:159-163.
[5] 竺科仪.水浸超声探头频率、声场特性的分析及测定研究[D].杭州:浙江大学,2006.ZHU Keyi.The Research on Analysis and Mesurement in Frequency and Acoustic Field of Water-logging Ultrasonic Probe[D].Hangzhou:Zhejiang University,2006.
[6] HATANAKA M,KOYAMA D,NAKAMURA K,et al.Ultrasonic Optical Lens Array with Variable Focal Length and Pitch[C]//Proceedings of Symposium on Ultrasonic Electronics.Chiba,2012,33:343-344.
[7] 张智.基于有限元法的压电换能器的仿真与结构设计[D].长春:吉林大学,2012.ZHANG Zhi.Device Simulation and Anisotropic Structural Design of the Piezoelectric Transducer Based on the Finite Element Method[D].Changchun:Jilin University,2012.