一种基于随机共振的无人机侦察图像增强方法
2018-06-19刘进
刘 进
(中国电子科技集团公司第二十研究所,陕西 西安 710068)
0 引 言
随着现代军事技术的发展,无人机(UAV)已经成为现代战争的重要组成部分,它与有人侦察机、预警机、侦察卫星等侦察平台组成了新一代侦察网络。无人机以其造价低、无人化、灵活机动性强等特点,正逐渐取代大型有人侦察机成为战场前沿最主要的侦察力量[1]。无人机侦察作为先进的遥感数据获取方式,已在军事侦察、气象探测、灾情监测、地图测绘等领域广泛应用,产生了巨大的军事、经济和社会效益,展现了极其广泛的应用前景[2-3]。
在军事应用领域,无人侦察机的突出优势使得其在军事侦察、目标监视、毁伤效果评估等领域展现了巨大的军事价值[4]。无人机在局部实战中的侦察图像传输示意图如图1所示,无人侦察机编队对敌方飞机编队及海上航母编队等重要军事目标进行前突抵近侦察,通过对特定作战区域进行目标搜索、目标定位和跟踪,形成无人机侦察图像并将侦察图像通过特定的通信链路传输至地面情报中心或作战指挥所;情报中心或指挥所对侦察到的目标图像进行识别,并针对敌方特定的军事目标制定相应的打击策略;打击任务完成后,无人机编队将对作战毁伤效果进行进一步的侦察和评估,将战场毁伤效果以侦察图像的形式传回情报中心或指挥所,有力地支撑了对敌方空中、海上重要目标打击任务的实施。然而,由于战场复杂的电磁环境及大气噪声的存在,无人机侦察图像往往受噪声影响严重,使得情报中心和指挥所对无人机侦察图像的识别能力受到很大影响。因此,对无人机侦察图像的去噪处理显得至关重要,其作用是为了提高信噪比,突出图像的期望特征。
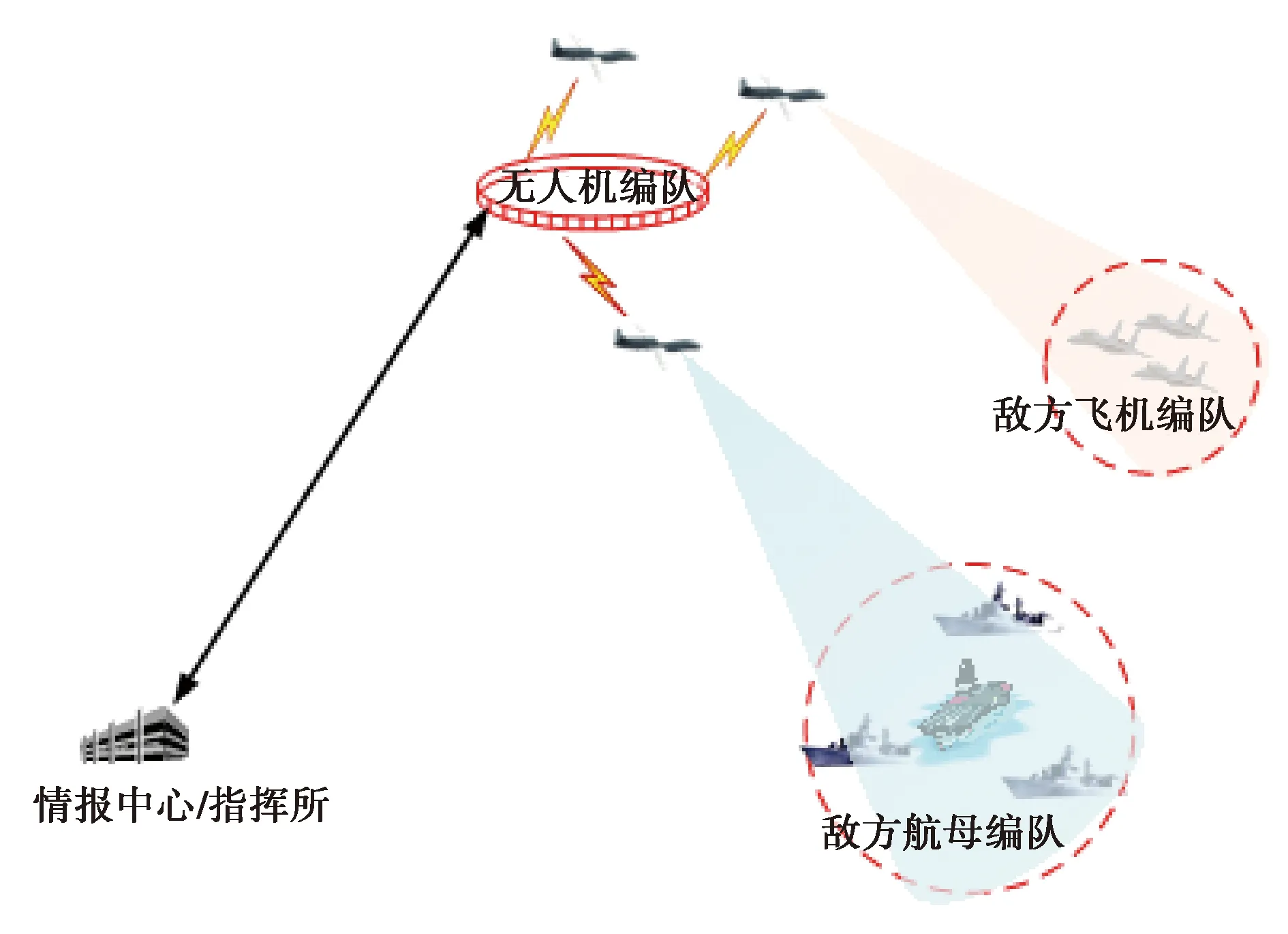
图1 无人机侦察图像传输示意图
传统的图像增强算法通常是根据图像本身的特点、噪声的统计特性和频谱分布规律,在消除噪声影响的同时尽可能地保留原始图像的有用信息从而实现图像增强[5-8]。然而,传统的图像增强算法研究都是针对图像峰值信噪比较高的情况,针对低峰值信噪比条件下的图像增强值得进一步研究。
随机共振是指利用输入信号、噪声和非线性系统之间的协作效应,通过噪声能量向信号能量转换,实现增强信号和抑制噪声效果的非线性现象。由于其具备的这种“化弊为利”独特优势,在生物、声纳、通信、电子、雷达等多个领域已经取得了广泛的应用[9-14]。一些学者将非线性随机共振技术引入到图像处理中,这些研究主要利用静态阈值系统实现图像对比度增强以及数字水印提取等,且侧重于定性的仿真研究[15-17]。鉴于双稳态随机共振系统本身的特点,本文开展了双稳态系统在二值图像增强中的定量研究。
1 传统的图像增强算法
传统的图像增强算法主要有中值滤波法[5-6]、维纳滤波法[7-8]等等,这些算法的原理都是根据图像信号本身的特点、噪声的统计特性和频谱分布规律,在消除噪声影响的同时尽可能地保留原始图像的有用信息,从而实现图像增强。
(1) 中值滤波法:中值滤波法基于排序统计理论,其原理是通过抑制噪声实现图像增强的非线性图像信号处理算法。该算法将图像中每一个像素点的灰度值设置为该点某邻域窗口内所有像素点灰度值的中值,从而使得周围像素灰度值的差比较大的像素取值接近周围的像素值,达到消除孤立噪声点的目的。
(2) 维纳滤波法:维纳滤波法的原理是根据有用信号和干扰噪声的统计特性,使得输出信号与有用信号的均方误差最小。具体的将维纳滤波法应用于图像处理中时,通过局部像素值方差来调整滤波器的输出,最终使得增强后的图像Γ(i,j)与原始数字图像s(i,j)的均方误差最小,从而达到消除干扰噪声、增强图像信号的目的。
2 基于双稳态系统的二值图像增强算法
双稳态随机共振系统在一维信号处理领域已经形成了比较成熟的理论体系,推广到二维图像信号处理时,面临的主要难点在于:双稳态系统的动力学方程的自变量是时间t,描述双稳态系统统计特性的福克普朗克方程也是关于时间t的演化过程,但是二维图像的属性是由空间坐标(i,j)来描述的,因此很难将双稳态随机共振技术直接应用于二维图像信号处理中。目前,解决这一问题的方法主要有以下2种:
(1) 第1种实现方法是针对图像信号利用空间坐标描述的二维属性,一些学者提出了二维参数调节双稳态随机共振系统并应用于二维图像信号的处理。然而,二维参数调节双稳态随机共振系统的理论研究处于起步阶段,其理论模型的物理意义不像一维双稳态随机共振系统那么明确,而且其理论模型还存在一定的不确定性,理论分析和实现也都非常复杂。
(2) 第2种实现方法是将二维图像信号转换为一维信号,利用一维双稳态随机共振系统进行处理,然后再将随机共振处理后的一维信号还原为二维图像。由于双稳态随机共振系统具有2个系统稳定状态,其系统本身的特性非常适合应用于强背景噪声下的二值图像增强,因此本文重点研究基于双稳态系统的二值图像增强算法。在本文的研究基础上,后续可考虑采用多稳态随机共振系统、非线性阈值共振系统、广义随机共振系统等实现灰度图像及彩色图像的增强。
2.1 算法实现步骤
基于双稳态系统的二值图像增强算法主要可以分解为以下几个步骤:
(1) 首先,对二值数字图像的灰度值进行映射,从而将二值数字图像像素值映射为双极性的图像像素信息序列Sk。
(1)
式中:M和N分别为图像按行和列方向的像素点数。
图像像素信息序列Sk为相互独立的随机变量,且有p(Sk=1)=p1和p(Sk=-1)=p2分别为白色像素点和黑色像素点出现的概率,p1+p2=1。
(2) 其次,对映射后的二值图像像素点按行或列的方向进行扫描,假设每一个图像像素点的扫描周期固定且时间为Tb,采用这种方法可以进一步将二值数字图像的像素值变换为一维的双极性非周期脉冲振幅调制(PAM)信号s(t):
(2)


图2 二值图像按行或者列的方向扫描

图3 扫描后形成的PAM信号
(3) 将含噪图像r(i,j)=s(i,j)+ω(i,j)经过变换后得到的一维加噪PAM信号r(t)=s(t)+ω(t)作为双稳态随机共振(BSR)系统的输入,此时双稳态系统的输出信号为x(t),则:
(3)
式中:a>0,b>0,为双稳态系统参数。
双稳态系统的势函数V(x)=ax/2+bx4/4,分别有2个势阱点和1个势垒点。关于随机共振系统研究的相关文献已经给出双稳态系统参数值的确定方法[12-14],从而采用调节双稳态系统参数的方式确保PAM信号和高斯白噪声的混合信号输入条件下产生随机共振现象。对共振后双稳态系统的输出信号x(t)在t=tk+T时刻进行抽样判决,将得到的判决信号序列Xk采用图2所示的方式逆向扫描,从而得到经过双稳态随机共振(BSR)系统增强后的二值图像x(i,j)。
(4)

图4 基于双稳态系统的二值噪声图像增强
2.2 算法性能理论分析
在图像处理中,峰值信噪比(PSNR)作为图像处理性能重要的衡量指标,可以表示为:
(5)
式中:图像的均方误差EMS可以表示为:
(6)
由于:
(7)
基于双稳态系统的二值图像增强算法的错误概率:
Pe=p1p(Xk=-1|Sk=1)+
p2p(Xk=1|Sk=-1)
(8)
式中:1≤k≤MN;p1=nw/MN;p2=nb/MN;nw和nb分别为白色和黑色的像素点数,且有nw+nb=MN。
从而,式(5)中RPSN可以表示为:
(9)
从式(9)可以看出,对图像性能改善的关键在于减小基于双稳态系统的二值图像增强算法的错误概率Pe,也就是关键要保证图像信号、噪声和双稳态系统三者间产生随机共振现象。根据文献给出双稳态系统参数值解析表达式[14],设置双稳态系统参数,可以保证随机共振现象的产生。
(10)
式中:T0和D0分别为归一化双稳态系统中PAM信号的码元间隔和噪声强度值[14]。
本文采用调节双稳态系统参数的方式实现基于双稳态随机共振的二值图像增强。
经过双稳态系统处理后,双稳态系统的输出信号x(t)的概率密度函数(PDF)p(x,t)满足福克普朗克方程[14]:
(11)
采用与基于双稳态系统的PAM信号处理相同的性能分析方法,可以计算得到基于双稳态系统的二值图像信号增强算法的误码率为:
Pe=p1p(Xk=-1|Sk=1)+p2p(Xk=1|Sk=-1)=
(12)
式中:1≤k≤MN,p1=nw/MN,p2=nb/MN;t=tk+kTb,k=1,2,…,MN
由于式(12)中含有不可积分项,因此上式为基于双稳态系统的二值图像增强算法的误码率表达式的最简形式。将式(12)给出的误码率表达式代入式(9)中,可以得到基于双稳态系统的二值图像增强算法的RPSN性能表达式。
3 仿真结果及分析
3.1 图像信号的一维PAM信号增强仿真
仿真参数:T0=100 s,D0=0.25为归一化双稳态系统中BPAM信号的码元间隔和噪声的强度值。信号s(t)的幅值A=1,信号码元个数为N=10,图像像素点的扫描时间Tb=0.001 s,噪声ω(t)的强度为D=5,根据双稳态系统参数的解析表达式,配置双稳态系统参数为a=1×105,b=5×1013。

图5 双稳态系统增强变换后的一维图像信号
根据仿真结果得出解调出的二进制图像像素点为Xk=∓1,与当前发送的二进制图像像素点Sk=∓1相同,从而实现了对加噪二值数字图像的正确恢复。
3.2 侦察图像增强仿真与性能验证
仿真参数:敌方飞机编队黑白图像(633×950),高斯噪声方差为0.5,等效于噪声强度为D=0.25,此时受噪声污染图像的峰值信噪比为RPSN=7.32 dB。与后续仿真的比较中,这种情况属于较低峰值信噪比的情形。图像像素点的扫描周期为Tb=0.001 s,归一化参考模型中扫描周期为T0=100 s、噪声强度为D0=0.25。根据式(10)可以得到:双稳态系统参数取值为a=1×105,b=1×1015。

图6 基于双稳态系统的敌方飞机编队二值图像增强
仿真参数:航母战斗群黑白图像(600×862),高斯噪声方差为1,等效于噪声强度为D=0.5,此时受噪声污染的无人图像的峰值信噪比为RPSN=5.86 dB。在与后续仿真的比较中,这种情况属于受噪声污染严重的低峰值信噪比的情形。图像像素点的扫描周期为Tb=0.001 s,归一化参考模型中扫描周期为T0=100 s、噪声强度为D0=0.25。根据式(10)可以得到双稳态系统参数取值为a=1×105,b=5×1014。

图7 基于双稳态系统的航母战斗群二值图像增强
从图6和图7的图像处理仿真结果可以看出,基于双稳态随机共振系统增强算法的视觉效果优于传统的采用中值滤波和维纳滤波的二值图像增强方法。
表格1和表格2给出了在不同二值图像和不同低峰值信噪比条件下,采用基于双稳态参数调节随机共振的二值图像增强算法的PSNR和IPSNR的性能明显优于传统的二值图像增强算法。综上所述,图像处理视觉效果和图像处理性能结果均表明,本文提出的算法优于传统的二值图像处理算法,适用于受噪声污染严重的低峰值信噪比条件的无人机二值图像增强应用。
4 结束语
针对强噪声背景下的无人机侦察图像识别及目标特征提取应用需求,本文提出了一种基于随机共振的无人机侦察图像增强方法。该方法利用随机共振系统具有的利用噪声增强图像信号的独特性质,克服了传统图像增强方法在强背景噪声(低峰值信噪比)条件下图像增强效果差的缺点。本文进行了非线性随机共振技术在强背景噪声条件下的无人机侦察图像增强方向的初步探索,理论推导和仿真结果相吻合,并通过仿真验证了该方法可有效改善强背景噪声下的侦察图像识别能力。基于本文的结论和今后进一步的深入研究,可以预测本文提出的方法将于未来在无人机军事侦察、目标监视、毁伤效果评估等领域具有潜在的参考和应用价值。

表1 不同图像增强算法峰值信噪比性能比较

表2 不同图像增强算法改进的峰值信噪比性能比较
[1] 孙仕祺,马杰.历史与现实:无人机发展历程、现状及其所面临的挑战[J].飞航导弹,2005(1):14-19.
[2] 肖霞.有人机过渡到无人机的变革与挑战[J].电子对抗,2007(4):36-39.
[3] 刘铭,孙轶.国外军用无人机技术的发展分析[J].舰船电子工程,2010,30(9): 22-27.
[4] 陈小双,翟为刚,赵万里.美国及中国军用无人机的新发展与性能分析[J].舰船电子工程,2011,31(7): 26-28.
[5] 赵高长,张磊,武风波.改进的中值滤波算法在图像去噪中的应用[J].应用光学,2011,32(4): 678-682.
[6] 王红君,施楠,赵辉,岳有军.改进中值滤波方法的图像预处理技术[J].计算机系统应用,2015,24(5):237-240.
[7] 金飞,张彬,司璇,袁丛鑫.基于维纳滤波的图像复原[J].中国传媒大学学报(自然科学版),2011,18(4):19-23.
[8] 姜源,彭月平,王剑.基于随机共振和维纳滤波的图像复原技术研究[J].科学技术与工程,2016,16(8):223-228.
[9] BENZI R,SUTERA A,VULPIANI A.The mechanism of stochastic resonance[J].J.Phys.A:Math.General,1981,14(11):L453-L457.
[10] MCNAMARA B,WILESENFELD K.Theory of stochastic resonance[J].Phys Rev A,Gen.Phys,1989,39(9):4854-4869.
[11] WIESENFELD K,MOSS F.Stochastic resonance and the benefits of noise from ice ages to crayfish and squids[J].Nature,1995,373(6509):33-36.
[12] DUAN F,XU B.Parameter-induced stochastic resonance and baseband binary PAM signals transmission over an AWGN channel[J].Int.J.Bifurcation and Chaos,2003,13(2):411-425.
[13] DUAN F,ABBOTT D.Binary modulated signal detection in a bistable receiver with stochastic resonance[J].Physica A:Statistical Mechanics and its Applications,2007,37(6): 173-190.
[14] LIU J,LI Z,GUAN L,PAN L.A novel parameter-tuned stochastic resonator for binary PAM signal processing at low SNR[J].IEEE Communicaions Letters,2014,18(3):427-430.
[15] JHA R,BISWAS P K,CHATTERJI B N.Image denoising using stochastic resonance[C]//Proc.of the Int.Conf.on Cognition and Recognition.Mysore,India,2005:343-348.
[16] CHOUHANR,JHA R K,BISWAS P K.Image denoising using dynamic stochastic resonance in wavelet domain[C]//The 12th IEEE Int.Conf.on Intelligent Systems Design and Applications(ISDA).Kochi,India,2012:58-63.
[17] XU B,JIANG Z,WU X,et al.Theoretical analysis of image processing using parameter-tuning stochastic resonance technique[C]//American Control Conf.New York,US,2007:1747-1752.
