前束外倾锁紧螺母拧紧力矩值保存和追溯
2018-06-18胡国武
胡国武
一汽-大众汽车有限公司佛山分公司 广东省佛山市 528225
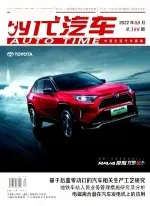
根据德国工程师协会VDI/VDE2862标准,将螺栓连接分为3个等级,见表1;大众集团康采恩《VW0110-2》沿用了VDI/VDE2862对螺栓连接的分级标准,并对相应级别的螺栓连接应采用的拧紧工具及存档形式进行了详细规定。
前束外倾锁紧螺母,技术标准见图1,前轮前束、后轮前束及后轮外倾螺母连接等级均为Class A,参照《VW0110-2》标准,应采用带控制器的拧紧设备或有1个传感器的数显扳手。一汽-大众佛山工厂除此处外的所有Class A及Class B拧紧点已实现力矩信息上传拧紧服务器,实现此处数据上传后,所有Class A及Class B的拧紧信息将全数字化。
针对此工况调整,参照相关技术和质量标准要求,我们选用了DAZ-TA 250 PRO产品,扭矩范围2-250NM,测量精度:扭矩:1% 角度:1%;
针对此工况调整,参照相关技术和质量标准要求,我们选用了DAZ-TA 250 PRO产品,扭矩范围2-250NM,测量精度:扭矩:1% 角度:1%;
改造前四轮定位设备调整过程如下:
a.由UPS设备扫描车身Kenn号,判断车型并传给四轮定位设备;
b.轴距自动调整;
c.放置方向盘平衡器;
d.四轮定位仪根据车型参数摆正车身位置,居中后经多点测量后,得出此状态下前束、外倾值,操作工根据屏幕提示调整前束、外倾至合格,用定值扳手进行力矩拧紧校验;
e.校验后反馈合格信号;
f.调整完毕;
整个四轮定位的调整过程由ASAM和四轮定位设备共同完成。ASAM负责控制与监控检测过程,四轮定位设备负责执行具体的调整检测流程。ASAM应用设备能力描述(DCD)虚拟出四轮定位工艺环境。待操作者扫描商品车信息后,ASAM从FIS系统获取车型信息,调取相对应检测程序。四轮定位设备通过驱动程序(Device-Drive)与ASAM进行数据交互。在获取工艺流程后,四轮定位设备开始执行具体的调整检测步骤,实时监控四个车轮的前束外倾值。整个工艺环节完成后,四轮设备与ASAM进行结果交互,ASAM进行判断并上传结果至生产网。
改造后,为保证相关信号传输,我们设计了如下网络拓扑结构方案,并重新梳理的流程(见图2):
表1 VDI/VDE2862标准
a.所有扳手通过RS232连接到串口服务器上;
b.串口服务器通过以太网形式连接到采集PC上;
c.采集PC通过网线接入到工厂的生产网络中,通过生产网络使用UDP与四轮设备进行连接;
d.为了增强系统的稳定性,采集PC采用主备形式;
e.车辆到达工位,进行调整,完成调整后。扳手会把拧紧结果和过程数据发送给采集PC,采集PC将拧紧结果数据(是否合格)发送给四轮定位PC。采集PC将调整的拧紧过程数据信息发送给tims系统,tims系统将拧紧状态结果发送给fis;
整体流程图:
a.由UPS设备扫描车身Kenn号,判断车型并传给四轮定位设备;(四轮定位设备)
b.轴距自动调整;(四轮定位设备)
c.放置方向盘平衡器;(四轮定位设备)
d.四轮定位仪根据车型参数摆正车身位置,居中后经多点测量后,得出此状态下前束、外倾值,并显示在屏幕上;此时车辆就位;
e.发送底盘号给采集PC控制端;
f.采集PC控制端根据底盘号判断车型,比如Audi A3或者Golf A7等;
g.根据车型配置调用工艺,并发给DAZ-TA;
h.操作者操作DAZ-TA直至拧紧合格,DAZ-TA再将拧紧结果反馈给串口服务器;
i.串口服务器将合格信号发给四轮定位PC,并上传拧紧服务器;
四轮定位PC与采集PC端应用报文如下:(包含开始调整、调整前/后桥、拧紧是否合格、KeepAlive)
①开始调整:(协议类型:KF)四轮定位设备PC——>采集PC,见表2:
车辆进入四轮定位系统后,车辆开始调整时所发送的指令,携带车辆14位Kenn号,如:0x010x01KF792017505818320000000000 00000000000x010x01,采集PC接到四轮定位KF后把原指令返回。并进行相关工作。
②KeepAlive生命报文:(协议类型:TG)四轮定位设备PC——>采集PC,见表3:
四轮定位设备PC周期性向采集PC发送TG,接到四轮定位TG后把原指令返回,如在规定时间内没有接收到对方报文则认为网络断开,报文实例:
③调整前/后桥:(协议类型:KS)四轮定位设备PC——>采集PC,见表4:

表2

表3
车辆经过四轮定位系统检测后,根据车辆状况进行调整前/后桥指令,操作者根据指示进行拧紧,调整前后桥:0001后桥调整、0000前桥调整,报文实例:
0x010x01KS792017505818320000000000 000000000000010x010x01
采集PC接到KS后把原指令返回,并进行相关工作。
备注:后桥的前束外倾,只有不合格才需要调整并拧紧;前桥的前束不需要判断,无论初始状态是否合格都需拧紧;
④拧紧合格:(协议类型:KK)采集PC——>四轮定位设备PC,见表5:

表4
螺钉编号:车辆共有多少螺钉要进行拧紧,预先规定出具体编号,编号是唯一的;
是否合格:0为拧紧力矩低,1拧紧合格,2拧紧力矩过高;序号0001—9999循环。报文实例:0x010x01KK000100000000000000 000000610x010x01
四轮定位设备PC接到KK后把原指令返回。
通过上述指令设计,及相关网络施工,实现了前束外倾拧紧信息上传拧紧服务器,且便于保持,按照要求至少需保存15年,另外,便于后续质量问题追溯,能快速查询出厂时的拧紧力矩及状态。

表5