坝顶水平位移监测方法探析
2018-06-14王君
王 君
(乌鲁木齐市水利勘测设计院(有限责任公司),新疆 乌鲁木齐 832000)
新疆是个严重缺水的干旱地区,为了更好地解决地下水超采问题,发展高效节水灌溉面积,减少非保灌面积;提高灌溉保证率,增加农作物产量;合理建设地表水工程是非常必要的,而灌区水库工程就是非常重要的调节性工程,水库建设过程中必须随时进行安全监测,测定各项指标合格,保证施工质量。
关于水坝安全监测重点涉及到坝基扬压力监测、应力应变监测、坝体结合缝监测、水平位移监测。为了完成对水坝水平位移监测,已有研究多采用垂线法、激光准直法、小角法、引张线法等[2- 6]。各种方法有各自的优缺点及应用范围,但对于一些观测条件恶劣情况,上述方法均失效。
文章以新疆境内的哈姆斯沟水库为研究对象,介绍坝顶水平位移监测中的一种新方法——测角前方交会法,来弥补上述方法的不足,力求为其应用推广奠定理论基础与实际工程应用经验。
1 工程概况
哈姆斯沟水库是以灌溉为主的拦河式水库,水库主要由引水工程(卡拉克特河引水渠首和水库引水渠)和水库枢纽建筑物(大坝、放水涵洞、溢洪道)组成。水库正常蓄水位797.51m,最大坝高36.9m,坝顶长425m。总库容972.6m3,控制灌溉面积5.58万亩。水库按50年一遇洪水设计,相应洪峰流量50.0m3/s,1000年一遇洪水校核,相应洪峰流量81m3/s。工程规模为小(1)型,工程等别为Ⅳ等,永久性主要建筑物级别为4级,永久性次要建筑物和临时建筑物级别为5级。
2 原理分析
文章介绍的坝顶水平位移监测新方法称作测角前方交会法,该方法具有适用于观测条件不佳、观测点不能到达的环境的优势,多应用于尾矿库安全监测、水上桩基测量以及高陡边坡监测等项目工程中,具有很好的应用前景[1]。
(1)观测原理介绍。
首先了解一下测角前方交会法的测量原理,具体原理图与A水电站碾压混凝土重力坝坝顶监测布设点具体如图1所示。
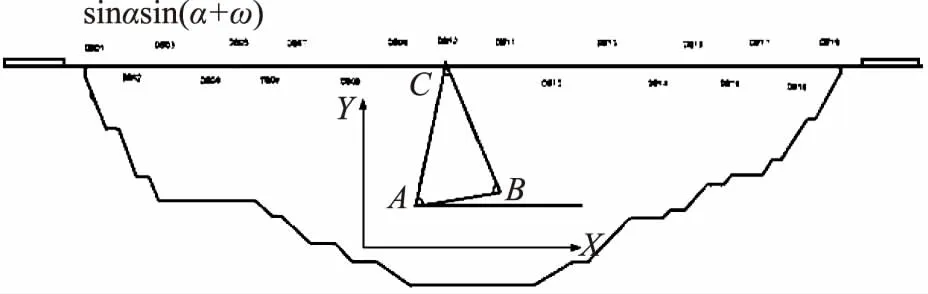
图1 测量原理及坝顶监测布设点布局图
设定其二维平面坐标系,将平行坝轴线作为X轴,图中所示由左向右为正向;垂直坝轴线作为Y轴,图中所示垂直向上为正向。图中所示设置监测点A、B、C。在监测点A处放置全站仪TCA2003,检测获得已知边c和交会边b的夹角a的角度值,同样在监测点B处放置全站仪TCA2003,检测获得已知边c和交会边a的夹角b。依次设定监测点A、B、C的坐标分别是(Xa,Ya)、(Xb,Yb)、(Xc,Yc)。根据监测点A与B的坐标值计算获得已知边c的方位角w的角度值。根据前方交会角度关系r+a+b=180°,可以利用公式(1)与(2)求出监测点C处的坐标值。
Xc=Xa+c×sinbcos(a+b)/sinr
(1)
Yc=Ya+c×sinbcos(a+b)/sinr
(2)
人为假定监测点C的位移改变量(X轴与Y轴)分别是ΔXc与ΔYc,与之相应的是角度改变量分别是Δa与Δb。利用公式(1)与(2)得到近似计算公式(3)与(4)。
ΔXc=c×[sinbcos(b-w)Δa/sin2r+sinacos(a+w)Δb/sin2r]/p
(3)
ΔYc=c×[sinbsin(b-w)Δa/sin2r+sinasin(a+w)Δb/sin2r]/p
(4)
当完成第一个周期测量工作后,为了方便后面测量,可令c×sinbcos(b-w)/psin2r=T1,c×sinbcos(a+w)/psin2r=T2,c×cosbcos(b-w)/psin2r=T3,c×sinbcos(a+w)/psin2r=T4,依次利用T1,T2,T3,T4代入公式(3)与(4)内,则简化成公式(5)与(6)。
ΔXc=T1×Δa+T2×Δb
(5)
ΔYc=T3×Δa+T4×Δb
(6)
当进行到第t个周期测量时,其角度值记作at,bt,依次与第一次检测获得的角度值a1、b1作差值,计算得到角度变化值Δat与Δbt。将其全部带入公式(5)与(6)计算求出监测点C在第t周期内沿X轴与Y轴方向的位移改变量,将历次周期位移改变量累积求和获得监测点C总的位移改变量。
(2)误差精度探讨。
考虑到全站仪TCA2003测量角度的精度是0.6″,所以设定回测角度时误差值是md=0.8″。假设每个周期内检测时对同样的测角测量n次,则得到公式(7)与(8)。
Δa=[at1-a1+at2-a1+…atn-a1]/n
(7)
Δb=[bt1-b1+bt2-b1+…btn-b1]/n
(8)
根据线性误差传播定律不难得出公式(9)。
mΔa=mΔb=md(2/n)0.5
(9)
充分结合公式(3)与公式(4),计算求出监测点C分位移与总位移直接的误差关系公式(10)、(11)及(12)。
mΔX=+(2/n)0.5(sin2bcos2(b-w)+sin2acos2(a+w))0.5(c×md/psin2r)
(10)
mΔY=+(2/n)0.5(sin2bsin2(b-w)+sin2asin2(a+w))0.5(c×md/psin2r)
(11)
mΔt=+(2/n)0.5(sin2a+sin2b)0.5(c×md/psin2r)
(12)
将A水电站已经获得的基线边长c数值(458.9745m)、测角a与b全部回代进公式(10)、(11)、(12)中,并不断改变测量次数n(从1开始,以步长为1的逐渐增加),依次可获得坝顶监测点水平位移量,整理汇总成表1。当n的数值调整到11时,点位中偏差m低于0.8mm,达到相关技术规范的规定标准[8]。即停止改变测量次数n,此时取定n是11。
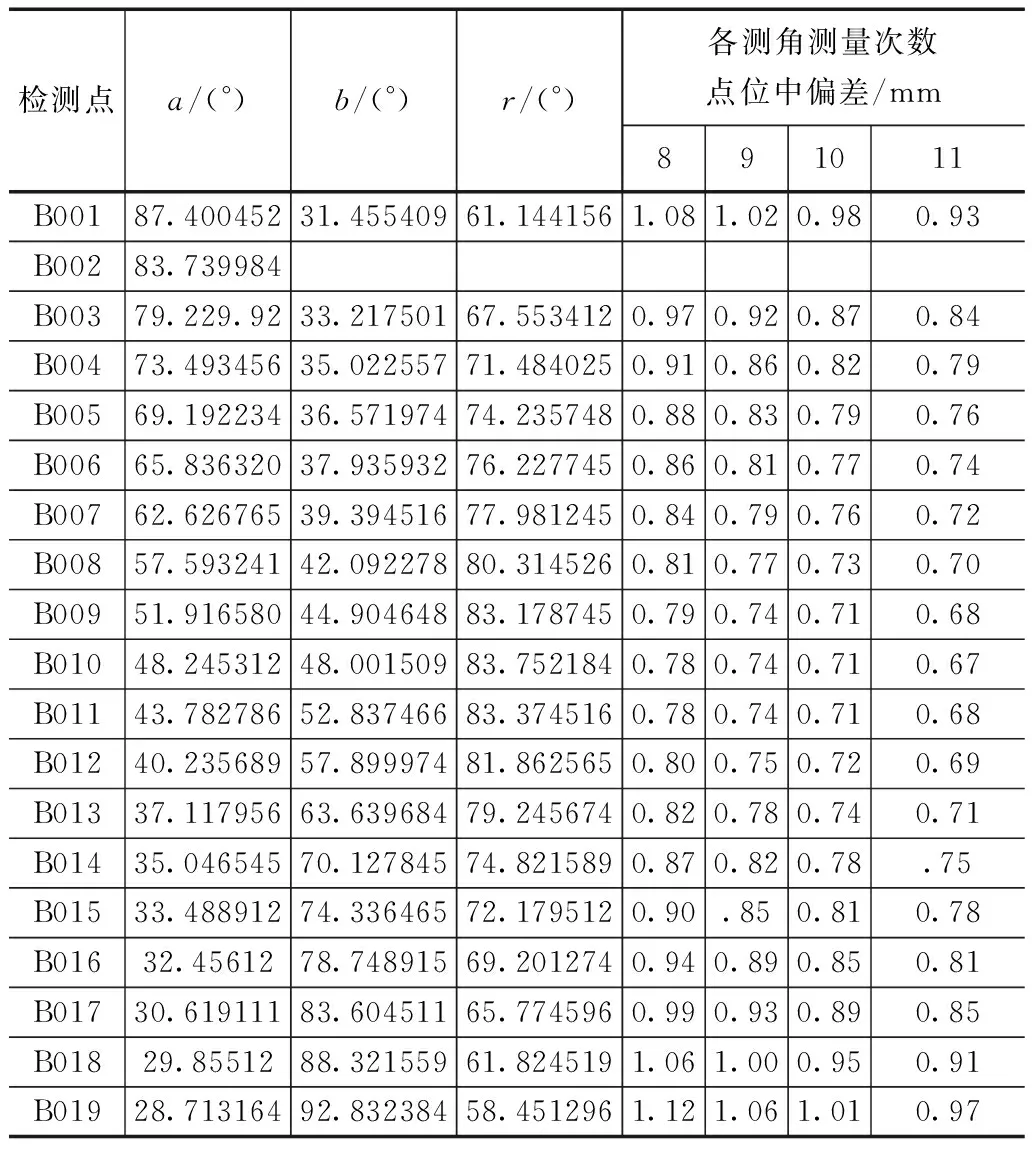
表1 不同监测点点位中偏差对比汇总表
3 精度影响分析
(1)检测点布置
根据坝顶监测点位置分布误差精度计算公式(10)、(11)、(12)的计算原理分析,不难得出,当测角精度不发生改变时,监测点水平位移量的误差主要受到交会角r的影响,当且仅当r角度为直角时,监测点中误差值达到最低值。A水电站监测点的点位中误差值在邻近坝肩边坡的坝顶处较大,分析其原因是由于受到其交会角r与直角偏差较大而造成的。在通常情形下,采用测角前方交会法完成测量,其监测点布置,必须保证其交会角r处于70~110°范围内,这样才能保证监测点点位中误差达到相应规范规定的标准。
在确定检测点时,不仅要考虑到达到通视条件,而且要考虑工作基点与监测点的稳定性问题。为了解决上述稳定性问题,最常见的方法是选择混凝土浇筑的观测墩,并在其中部放置对中盘。若资金充裕,可以选择每一个观测墩内放置一个Leica圆棱镜,充当永久观测装置的一部分,通过这种方法可有效避免不同棱镜之间对位中误差差异造成的干扰。
在确定工作基点时,应保证工作基点A与工作基点B两者之间的对视倾角相对较小,尽量降低斜距转化成平距的偏差。一旦交会图形确定下来,同样尽量缩小已知边c的长度降低偏差。因此保证基点A与B两者间的水平距离是布设基点工作的关键。
水电站坝顶水平位移测量是最为常年观测项目,工作基点必须定期利用高精度控制网对其校核,确保工作基点稳定性达标。
(2)检测过程
制定全站仪检查制度,落实完成降低仪器自身轴系误差。工作基点采用元水准气泡架设后,必须借助精度较高的水准管完成仪器对中整平工作。
借助全站仪检测时,避免棱镜周围存在强光反射,确保全站仪准确无误地自动识别目标。在A水电站坝顶监测点水平位移检测全过程中,为了避免不锈钢扶手强光反射干扰检测,特意选用土工布将其覆盖包裹。在检测后,可将其包裹的土工布去除。
选择盘左盘右检测时,为了保证检测值的准确性,抵消仪器竖轴倾斜造成的偏差。等到测量完成后,如果仪器显示测角见偏差比较多时,必须重新进行测量。
(3)仪器影响
分析计算公式(10)、(11)、(12)可以得到,在基线水平距离数据已知的情况下,1测回测角精度mj越大,位中误差mΔt越大。近几年来,全站仪测角精度不断缩小,更加精准,会降低检测次数,提升检测速度。以A水电站坝顶监测点为例,若采用测角精度达到0.5″,则仅测量9次即可符合相关规程中规定的低于0.8mm的点位中误差精度;若全站仪测角精度达到0.4″,仅需要测量6次即可;若全站仪测角精度达到0.3″,仅需要4次即可;若全站仪测角精度达到0.2″,则仅需要测量3次就可以到达相关规程中规定的标准精度。只要全站仪测角精度不断缩小,测角前方交会法在坝顶水平位移监测中应用前景十分广泛。
4 结论
文章以哈姆斯沟水库均质土坝为研究对象,介绍坝顶水平位移监测中的一种新方法——测角前方交会法如何应用。详细介绍其检测原理与应用中具体监测点布置,获得各个角度与检测边的三角函数关系,定量化表达位中误差的影响因素。从监测点布置、监测过程、仪器精度3个方面分析如何影响测角前方交会法的检测精度,并提出相应措施,为测角前方交会法的应用推广奠定实用基础。总的概括,测角前方交会法具有布置基点不受约束,并能同时观测水平与竖直两个方向的优势,所以具有很好的应用前景。
[1] 万冠军, 张友军, 李异. 测边前方交会法在边坡监测中的应用[J]. 红水河, 2010, 29(05): 80- 83.
[2] 何康. 基于前方交会的全站仪免棱镜测距精度检查浅析[J]. 赤峰学院学报(自然科学版), 2015, 31(21): 68- 69.
[3] 冯甲林, 方朝阳. 飞来峡大坝坝顶水平位移安全监控指标拟定[J]. 人民黄河, 2012, 34(07): 130- 131, 134.
[4] 李镇惠, 骆建宇, 马奕仁, 等. 三峡大坝水平位移回归监测建模分析[J]. 长江科学院院报, 2013, 30(11): 109- 112.
[5] 宋铁军. 石头河水库大坝位移监测分析[J]. 陕西水利, 2014(06): 122- 124.
[6] 陈斌. 湖南镇大坝坝顶水平位移监测系统改造方案[J]. 大坝与安全, 2015(05): 37- 42.
[7] 陈正威, 崔秀伟, 蒋剑, 等. 测角前方交会法在坝顶水平位移监测中的应用——以阿海水电站为例[J]. 人民长江, 2016, 47(S1): 167- 169.
[8] DL/T 5178- 2003. 混凝土坝安全监测技术规范[S].
