基于海岸线状特征匹配的近海域卫星遥感影像定位
2018-06-09朱宁龙
朱宁龙
(91404部队,河北秦皇岛066000)
卫星遥感数据应用的前提是遥感影像定位。对于遥感影像定位,学者们做了大量工作,如根据卫星轨道参数等信息的系统定位[1-2]、基于控制点的校正定位[3-4]、基于大重叠度(空间差别较小)影像的配准定位等[5-7],但这些都无法解决卫星轨道及传感器姿态角等信息缺乏且无控制点的遥感影像定位问题。因此,文献[8]在分别提取电子地图和遥感影像的特征图像后,通过匹配进行影像定位,在参考特征图像较大时不具有计算可行性;文献[9-10]利用Zernike矩旋转不变特性并结合稳态遗传算法的高效寻优性能进行影像匹配定位,但没考虑影像的缩放、扭曲等变形,且在参考影像较大时计算效率仍有待提高;文献[11]借助朵云与阴影的关系概略确定遥感影像扫描区域的位置,但是朵云提取比较困难且误差较高。
针对卫星轨道参数及传感器姿态角等信息缺乏且无控制点的近海域遥感影像定位难题,本文在已构建海岸线数据库的条件下提出了基于海岸线状特征匹配的卫星遥感影像定位方法,为解决卫星遥感影像定位面临的大空间开曲线匹配的难题,设计了针对海岸线状特征的改进曲线形状签名和优化曲线匹配算法,可有效提高定位的时效性、鲁棒性和准确性。利用LandSat和SPOT影像的定位实验验证了该方法的有效性。
1 基本原理
在遥感影像解译中,线状特征因其显著性和稳定性而具有重要价值[12-13]。海岸作为遥感影像中比较普遍的线状特征,具有一定的代表性。因此,本文以该特征为基础设计了近海域卫星遥感影像定位方法,基本原理如下:
1)针对遥感影像可能受云、雾、雨、雪等因素影响而质量不佳的问题,设计了人工交互式的海岸线提取方法,即扩展应用医学影像处理领域常用的Live-Wire算法[14-15],实现海岸线的快速准确提取;
2)针对海岸线一般很长、很复杂、变化比较大等特性,设计了改进的曲线形状签名,并据此实现包括整体搜索、局部匹配等步骤的海岸曲线匹配;
3)根据曲线匹配对应的点集,计算变换矩阵来实现近海域卫星遥感影像定位。

图1 卫星遥感影像定位流程Fig.1 Location flowchart of satellite remote sensing images
2 海岸线提取
由于待定位的卫星遥感影像有时由于气象等因素的影响而质量不佳,准确地自动识别存在困难,因而宜采用人机交互式的海岸线提取策略。
本文将医学影像交互式分割中常用的Live-Wire算法扩展应用到遥感影像分割中。其基本思想是:将预跟踪的卫星遥感影像的一个通道当成一个连通图,图像中的像素当作图中的节点,相邻像素点之间的边当作连接节点的边;在每一个边上定义一个代价函数,为强边缘赋予较小的代价值,非强边缘赋予较大的代价值,同时相邻像素间的弧赋0代价,而非邻接像素间的弧赋+∞代价,将跟踪转化为起始点到目标点之间的最优路径问题,然后通过图搜索寻找物体的边界,将用户指定的海岸线边界上两点间的最短路径当作海岸线。图搜索产生最优路径采用Dijkstra算法[16],图搜索过程完成后,就得到了一个有向连接图。给定图中的任何一个节点,都可以通过有向连接直接找到该点到种子节点的惟一最小代价连通路径。交互分割过程就是用户通过拖拽鼠标动态地指定一个自由点,由计算机自动找出连接该点到种子点的最小代价路径。由于边界点之间的连接代价小,用户只要将自由点放在边界附近,并沿着边界变化的方向不断调整自由点,就可以完成分割工作。
3 曲线匹配
曲线匹配是为了实现基于海岸线的定位,本质上是一种局部对整体的开曲线匹配问题,而现有的匹配算法多用于解决闭合形状的匹配,解决局部匹配的算法不多,如最近点迭代法、基于概率的方法、特征串的方法等[17],但是这些方法并不能满足海岸曲线匹配,因为海岸的线状特征决定了曲线匹配算法需要具备如下特征:①海岸线一般很长,需要考虑计算可行性;②海岸线很复杂,表现在海岸线的不同局部具有不同尺度的凹凸特征,要求算法具有尺度不变性;③海岸线变化比较大,要求算法鲁棒性强。
为此,本文提出了一种基于改进的曲线签名的开曲线匹配算法,该算法分为整体搜索、局部匹配2个阶段:首先,通过基于改进曲线形状签名的初步匹配,整体搜索确定多个候选的匹配区域;然后,对这些区域通过二次匹配实现匹配选优。根据曲线匹配的对应点集来计算变换矩阵,就可实现遥感影像定位。
3.1 改进的曲线形状签名
由于海岸线的曲率变化较大,因而选取基于曲率的形状算子来描述其形状。文献[18]给出了一种基于曲率-积分的尺度不变的曲线形状签名,即对于形状Γ(u)=(x(u),y(u)),按照等弧长采样,其曲率可由下式计算[19]:

式(1)中,Xu、Xuu、Yu、Yuu分别表示x(u)、y(u)经过高斯卷积平滑之后的一阶、二阶微分。
式(1)很好地解决离散点的曲率求解问题。在此基础之上,求得采样点的曲率绝对值积分,得到积分曲线。经过数学证明[20],此条曲率-积分曲线作为形状签名具有尺度不变性;同时,因为曲率本身具有旋转、平移不变性,因而将这条曲线按照坐标等间隔采样,可得到初始的曲线形状签名,如图2 c)、d)所示。
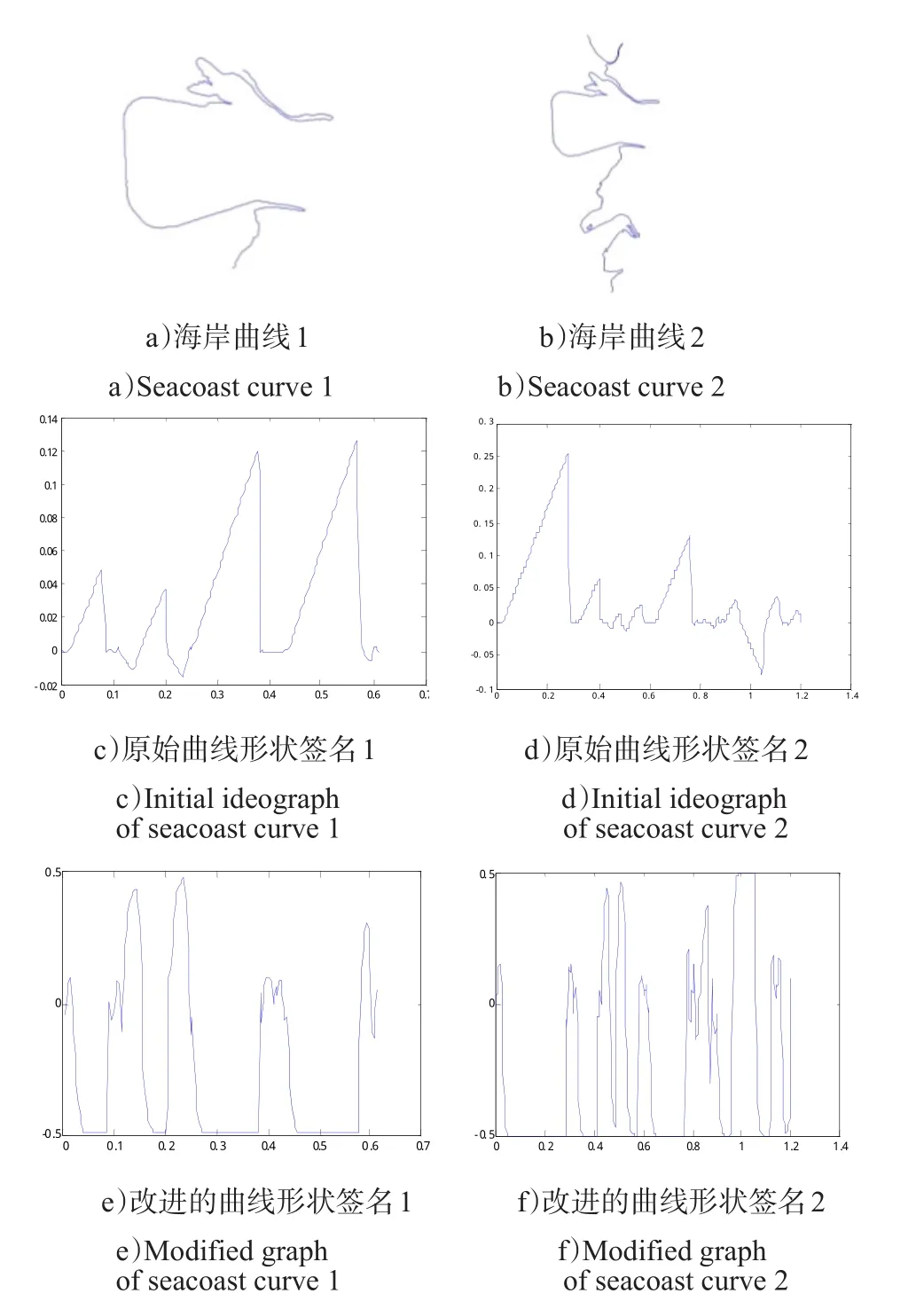
图2 海岸曲线形状签名的改进Fig.2 Improved form ideograph of seacoast curve
然而,实践表明该形状签名在海岸曲线匹配过程中会经常失效。经过理论与实践分析可知:应为海岸线中曲率较大的地方往往对应于河流的入海口,而这些地方的曲率值往往很大,使得与之临近的很多局部细节常常会被淹没。因此,需要对该形状签名进行改进,引入sigmoid函数[21],它是基于灰度值的拟合方法,图像边缘的灰度曲线如图3所示。

图3 Sigmoid函数曲线Fig.3 Sigmoid curve
sigmoid函数形式为:

可以用sigmoid函数来逼近图像边缘的灰度分布,sigmoid函数一阶导数最大值、二阶导数过零点是边缘的位置,对sigmoid函数求导是边缘亚像素位置。该方法将曲率小的局部细节加以放大的同时可抑制曲率很大的点,最后得到改进的曲线形状签名如图2 e)、f)所示。
3.2 海岸曲线初步匹配
在利用上述改进的曲线形状签名进行海岸曲线匹配的过程中,因为离散数值操作的影响,使得得到的尺度不变形状签名与待匹配形状之间仍然会存在着微小的尺度差异。为了减小这部分的误差,利用对尺度不敏感的归一化互相关(Normalized Cross Correlation,NCC)作为匹配度量,取最大的NCC值得到最终的部分匹配结果。
式(3)中:t为模板函数,对应输入曲线;f(i)对应参考曲线上被t覆盖的部分,此部分的位移为u。
根据得到的匹配点集来计算相应的变换矩阵后,对目标遥感影像进行相应变换,就可得到初步的定位结果。图4给出了初步的海岸曲线匹配结果。图4 a)中的红色曲线为输入曲线,蓝色曲线为大范围的参考曲线。其中,输入曲线由参考曲线中的一部分经过平移、旋转、尺度缩放得到;图4 b)为基于原始曲线形状签名的匹配结果,由于受曲率大的点影响较大,匹配部分(绿线)与原始曲线差异较大,使得最终的变换矩阵与真实值之间有些出入;图4 c)为基于改进的曲线形状签名的曲线匹配结果,在一定程度上缓解了该问题,尤其在实际应用中对海岸线的入海口地方变化较大的情况,经过实验验证确实能够获得更好的效果。
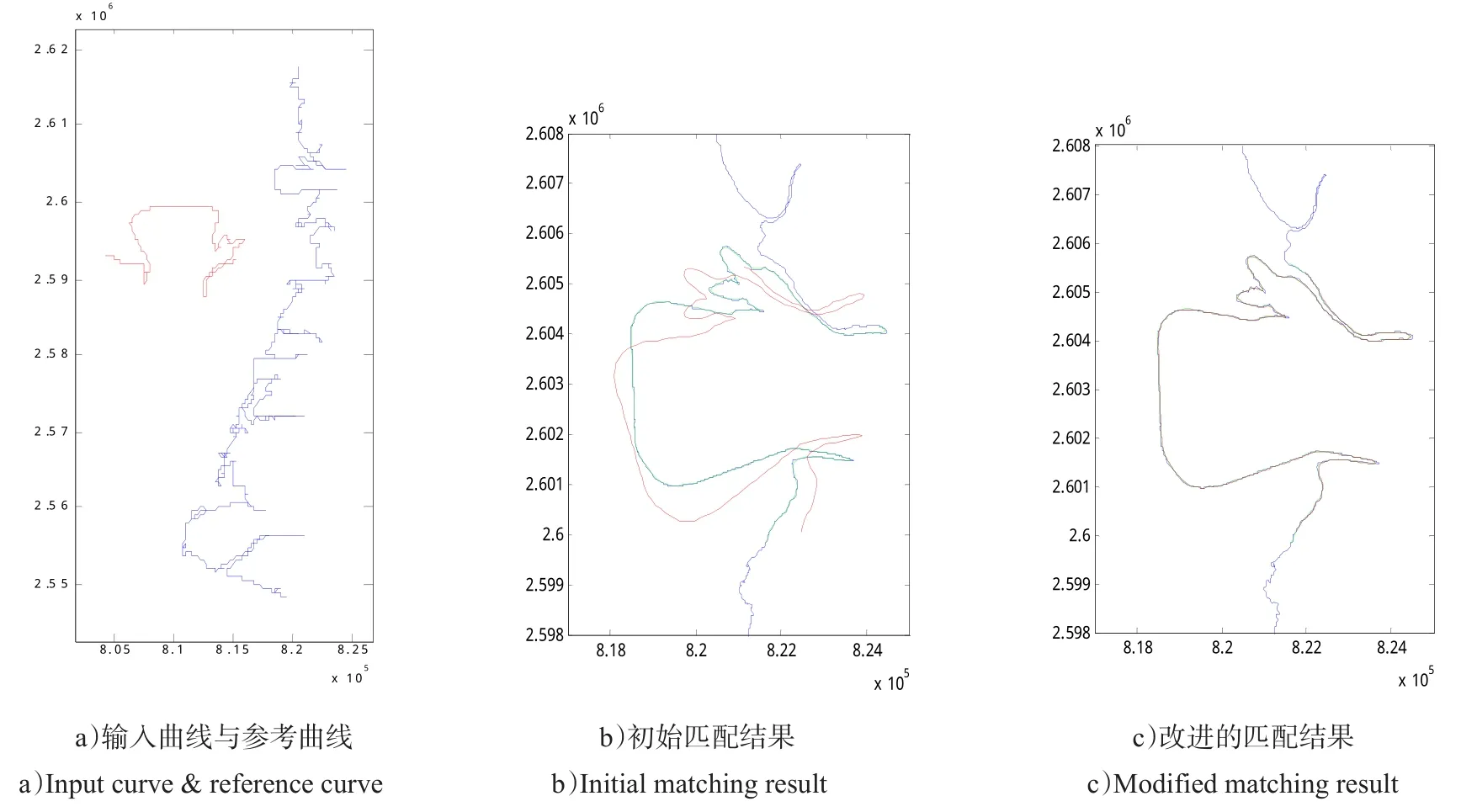
图4 海岸曲线的初步匹配结果Fig.4 Preliminary result of seacoast curve matching
3.3 海岸曲线二次匹配
由于海岸线数据库的空间范围大,库中不同形态的海岸曲线可能会对应同一曲线形状签名,如图5所示,从而在上述的海岸曲线初步匹配中会出现多个匹配结果。
因此,需要对初步匹配的海岸曲线通过二次匹配来选优,即:以改进的曲率-积分曲线(曲线形状签名)作为特征识别标识,以2条曲线的相关系数作为二者相似度的度量。首先,从参考的海岸线数据库中选择最佳初步匹配的前N(N>2)段;然后,进行基于原始曲线相关性的相似度量判断,从中取出最佳匹配者作为最终的定位结果,并计算对应的空间变换矩阵,实现卫星遥感影像定位。

图5 形态差异较大的同型曲线Fig.5 Homotypical curve with great form difference
4 实验分析
4.1 实验条件
1)已构建海岸线数据库,在200km×200km的实验区域中的海岸线矢量主要来源于LandSat系列遥感卫星影像;
2)待定位的卫星遥感影像为15 m分辨率的Land-Sat7影像、5 m分辨率的SPOT5影像。
4.2 定位结果
根据曲线匹配结果生成的变换矩阵,对待定位影像中的特征海岸线区域进行坐标变换,生成定位后的影像,并叠加到参考影像上,由此可判断定位结果的正确性。
如果定位比较准确,则待定位影像应该与参考影像具有高度的形态一致性。如果曲线匹配较好,一个曲线段就可以完成整个待定位影像的定位;如果曲线匹配较差,往往是比例或旋转角度精度不够造成,这时可选择3~5个曲线段分别进行定位,然后只利用各个定位结果的偏移量进行二次定位,达到最佳定位的目的。
图6为影像定位算法的实际应用效果。
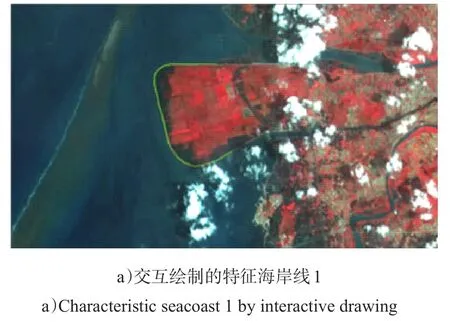
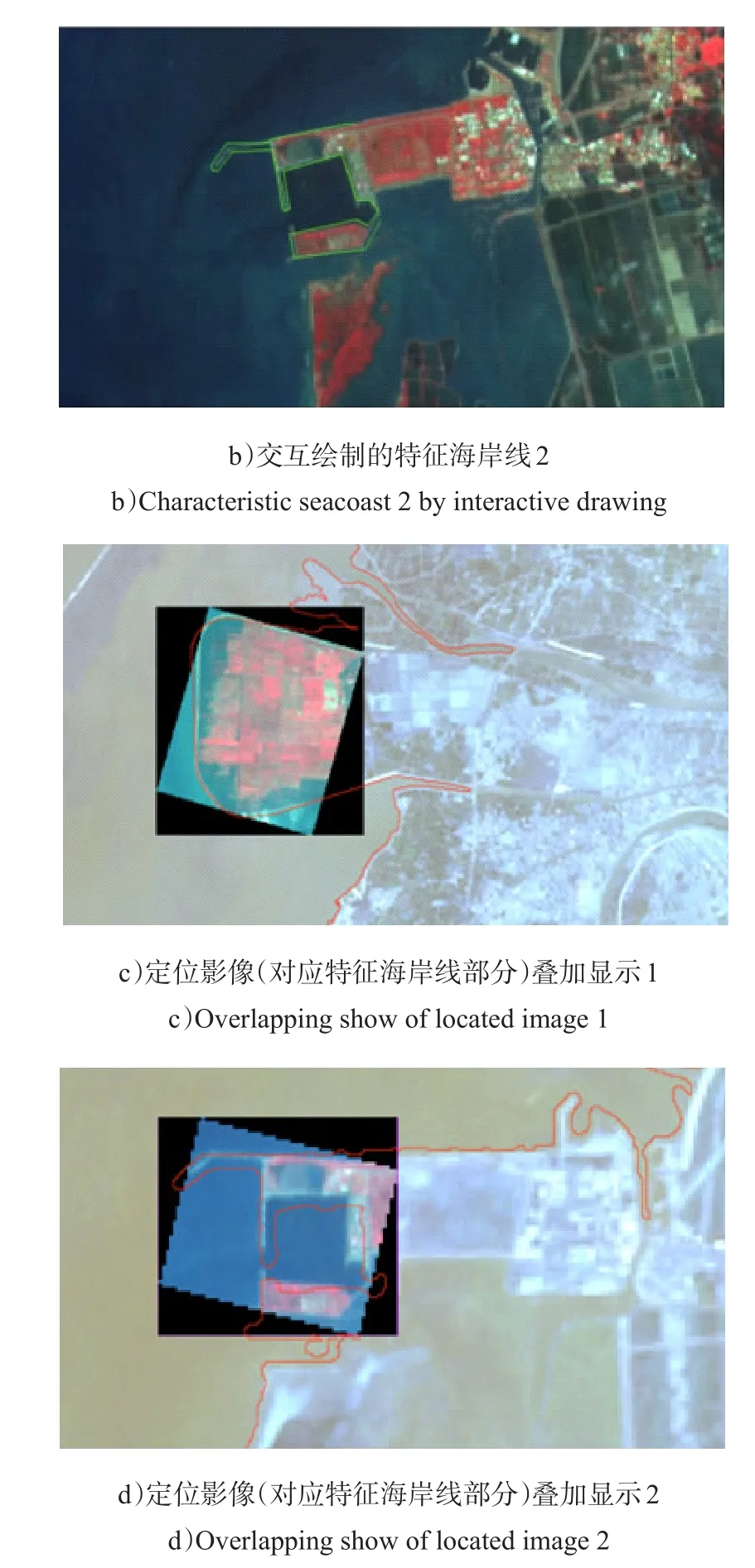
图6 影像定位算法的实际应用效果Fig.6 Practical application result of image location algorithm
4.3 性能分析
1)精确度实验。为了测试算法的定位精度,用LandSat7影像进行测试,分辨率为15 m,结果如图7所示。图7 a)为参考影像;b)为对应于a)中的红色方框区域,直接从a)中截取;c)为b)经过平移、旋转、缩放后的结果;d)为最终的定位结果,红线为输入影像c)的海岸线提取结果,蓝线为参考影像对应的海岸线。影像矩阵变换参数与真实值之间的比较如表1所示,利用该组变换参数得到的影像定位均方根误差RMSE较小,精度满足应用要求。

图7 测试影像定位的精确度Fig.7 Precision test of image location algorithm

表1 影像矩阵变换参数与真实值之间的比较Tab.1 Comparison between image matrix transforming parameters and its true vales
2)异源影像定位实验。为测试算法对LandSat影像外的其他卫星遥感影像的定位能力,利用SPOT5影像进行测试,结果如图8所示。图8 a)为用于叠加显示的Landsat影像(2009年拍摄);b)为SPOT影像(2011年拍摄);d)为定位结果。可见,本算法对异源遥感影像仍能有效定位。
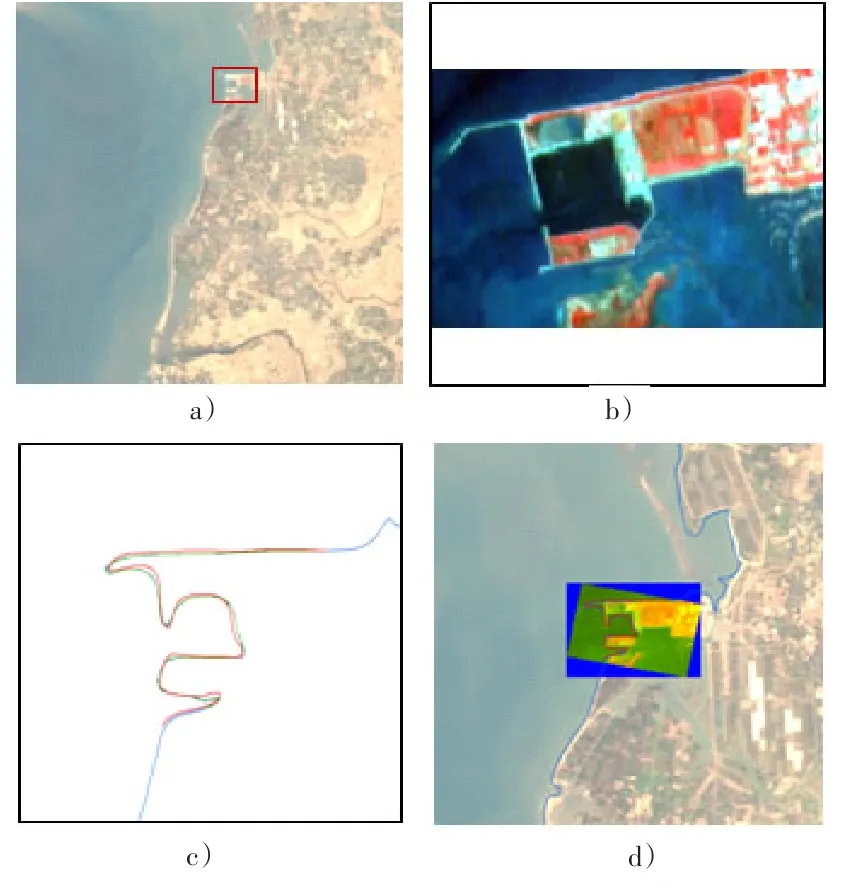
图8 SPOT5影像的定位结果Fig.8 Location result of SPOT5 images
3)多时相影像定位统计实验。为了验证算法对多时相影像的定位效果,选取2013-2014年间的4张SPOT影像,为了更好地表示统计结果,选取了海岸线上的4个部分进行测试,结果如图9所示。

图9 2013-2014年间共4张SPOT卫星遥感影像的海岸线变化及定位结果Fig.9 Seacoast variation and location results of four SPOT satellite remote sensing images from 2013 to 2014
在图9中:第1行给出了4张影像的海岸线提取结果,第2行给出了对这些部分定位后的中心(绿色圆圈内的蓝点表示、4个中心点的质心用红色“+”表示)在参考海岸线上的对应位置。定位实验的统计结果如表2所示。由表2可见:人工海岸线随时间变化很小,而沿海滩涂部分对应的海岸线受时间的影响相对较大(图10第4列),但最终都实现了准确定位。不同时间下得到的匹配中心的标准差SE很小,且相应的均方根误差RMSE与输入海岸曲线长度相比也很小。

表2 定位结果统计Tab.2 Statistic of location results
综上,本算法能解决卫星轨道及传感器姿态角等信息缺乏且无控制点的多源、多时相、多分辨率的遥感影像定位问题,且具备大范围内快速搜索、定位精度较高等性能。
5 结束语
本文针对卫星轨道、传感器姿态角等信息缺乏的无控制点遥感卫星影像定位问题,提出了基于海岸线状特征的近海域卫星遥感影像定位方法,即将定位问题转化为基于已经构建的海岸线数据库与人机交互提取的待定位遥感影像的海岸线之间的开曲线匹配问题,并通过基于改进的曲线形状签名实现海岸曲线准确匹配,实验结果验证了算法的可行性和有效性。下一步的工作包括:海岸线数据库的合理更新,利用季节、河流等其他信息提高曲线匹配的精准程度等。
[1]程春泉,邓喀中,张继贤,等.基于ECR与ECI星历数据的遥感影像定位[J].测绘科学,2010,35(2):13-15.CHENG CHUNQUAN,DENG KAZHONG,ZHANG JIXIAN,et al.Positioning of remote sensing image based on ephemeris in ECR or ECI[J].Science of Surveying and Mapping,2010,35(2):13-15.(in Chinese)
[2]姬渊.缺少控制点条件下SPOT 5遥感影像定位技术研究[D].郑州:解放军信息工程大学,2010.JI YUAN.Research on object positioning with SPOT 5 satellite image under lack of ground control points[D].Zhengzhou:PLA Information Engineering University,2010.(in Chinese)
[3]刘春,展昀,吴杭彬.辅助控制点下快鸟影像定位求解及其定位精度分析[J].同济大学学报:自然科学版,2009,37(7):983-988.LIU CHUN,ZHAN YUN,WU HANGBIN.Solution of geo-positioning and its accuracy analysis in QuickBird imagery based on auxiliary ground control points[J].Journal of Tongji University:Natural Science,2009,37(7):983-988.(in Chinese)
[4]余先川,吕中华,胡丹.遥感图像配准技术综述[J].光学精密工程,2013,21(11):2960-2972.YU XIANCHUAN,LV ZHONGHUA,HU DAN.Review of remote sensing image registration techniques[J].Optics and Precision Engineering,2013,21(11):2960-2972.(in Chinese)
[5]吉祥,韩军伟,梁楠,等.基于景象匹配的无人飞行器定位方法[J].系统仿真学报,2014,26(6):1291-1296.JI XIANG,HAN JUNWEI,LIANG NAN,et al.UAV positioning simulation method based on scene matching[J].Journal of System Simulation,2014,26(6):1291-1296.(in Chinese)
[6]康凯.基于图像配准坐标定位的目标跟踪方法[J].电子技术与软件工程,2014,18(4):112-113.KANG KAI.Target tracking method of coordinate based on SIFT[J].Electronic Technology&Software Engineering,2014,18(4):112-113.(in Chinese)
[7]刘松林,孙刚,牛照东,等.基于相对直方图的数字表面模型数据与遥感图像配准[J].光学精密工程,2014,22(6):1696-1705.LIU SONGLIN,SUN GANG,NIU ZHAODONG,et al.Registration of DSM data and remote sensing image based on relative phase histogram[J].Optics and Precision Engineering,2014,22(6):1696-1705.(in Chinese)
[8]徐建斌,洪文,刘喆,等.基于电子地图的遥感影像自动粗定位研究[J].测试技术学报,2005,19(1):91-94.XU JIANBIN,HONG WEN,LIU ZHE,et al.The study of automatic rough-location of remote sensing image based on digital maps[J].Journal of Test and Measurement Technology,2005,19(1):91-94.(in Chinese)
[9]徐建斌,洪文,吴一戎.基于遗传算法的遥感影像匹配定位的研究[J].测试技术学报,2004,18(4):351-354.XU JIANBIN,HONG WEN,WU YIRONG.Study of remote sensing images matching location based on genetic algorithms[J].Journal of Test and Measurement Technology,2004,18(4):351-354.(in Chinese)
[10]徐建斌,洪文,吴一戎.基于Zernike矩和稳态遗传算法的遥感图像匹配方法[J].电子与信息学报,2005,27(6):924-927.XU JIANBIN,HONG WEN,WU YIRONG.A remote sensing images matching method based on Zernike moments and steady genetic algorithms[J].Journal of Electronics and Information Technology,2005,27(6):924-927.(in Chinese)
[11]潘申林,赵杰,黄小波,等.多云信息辅助卫星遥感影像扫描区域的概略定位[J].测绘科学技术学报,2007,24(2):142-144.PAN SHEN LIN,ZHAO JIE,HUANG XIAOBO,et al.Initial location for the scanning region of the remote sensing imagery based on the cloudlet[J].Journal of Zhengzhou Institute of Surveying and Mapping,2007,24(2):142-144.(in Chinese)
[12]李畅,李芳芳.基于假设检验的数字影像线状特征亚像素自动提取[J].测绘学报,2013,42(1):67-72.LI CHANG,LI FANG FANG.Auto-extracting sub-pixel line feature of digital images based on hypothesis testing[J].Acta Geodaetica et Cartographica Sinica,2013,42(1):67-72.(in Chinese)
[13]陈思,杨健,宋小全.基于编组拟合的合成孔径雷达图像线特征提取[J].清华大学学报:自然科学版,2011,51(2):166-171.CHEN SI,YANG JIAN,SONG XIAOQUAN.Extraction of liner features in SAR images using grouping and fitting[J].Journal of Tsinghua University:Science and Technology,2011,51(2):166-171.(in Chinese)
[14]FALCAO A X,UDUPA J K,MIYAZAWA F K.An ultrafast user-steered image segmentation paradigm:Live-Wire-on-the-fly[J].IEEE Transactions on Medical Imaging,2000,19(1):55-62.
[15]石锐,黄向娟.基于改进Snake模型的肺部图像分割[J].计算机工程与应用,2014,50(15):164-167.SHI RUI,HUANG XIANGJUAN.Lung segmentation based on improved Snake model[J].Computer Engineering and Applications,2014,50(15):164-167.(in Chinese)
[16]王志蕊.基于WSN的水环境监测系统中移动机器人路径规划的研究[D].长春:吉林大学,2015.WANG ZHIRUI.Research on path planning for robot in water environment monitoring system based on WSN[D].Changchun:Jilin University,2015.(in Chinese)
[17]张春莹,潘荣江.由整体到局部的平面曲线部分匹配算法[J].计算机辅助设计与图形学学报,2008,20(7):894-899.ZHANG CHUNYING,PAN RONGJIANG.A global to local partial matching algorithm for planar curves[J].Journal of Computer-Aided Design&Computer Graphics,2008,20(7):894-899.(in Chinese)
[18]CUI M,WONKA P,RAZDAN A,et al.A new image registration scheme based on curvature scale space curve matching[J].The Visual Computer,2007,23(8):607-618.
[19]MOKHTARIAN F,ABBASI S.Shape similarity retrieval under affine transforms[J].Pattern Recognition,2002,35(1):31-42.
[20]晋武侠,耿国华,李康,等.基于曲线匹配的颅像叠加方法[J].系统仿真学报,2013,25(9):2144-2149.JIN WUXIA,GENG GUOHUA,LI KANG,et al.Method of skull-photo overlay based on curve matching[J].Journal of System Simulation,2013,25(9):2144-2149.(in Chinese)
[21]张舞杰,李迪,叶峰.基于Sigmoid函数拟合的亚像素边缘检测方法[J].华南理工大学学报:自然科学版,2009,37(10):40-41.ZHAGN WUJIE,LI DI,YE FENG.Sub-Pixel edge detection method based on sigmoid function fitting[J].Journal of South China University of Technology:Natural Science Edition,2009,37(10):40-41.(in Chinese)
