达芬奇机器人手术系统在泌尿外科手术中的优势
2018-06-07贾卓敏黄庆波
贾卓敏,马 鑫,艾 星,黄庆波,艾 青,张 旭
(1.中国人民解放军陆军总医院泌尿外科,北京 100700;2.中国人民解放军总医院泌尿外科,北京 100853)
腹腔镜技术是20世纪医学发展过程中重要的里程碑,具有创伤小、痛苦少、恢复快、效果好等优点。而进入21世纪,基于腹腔镜技术的基础,由美国Intuitive Surgical公司研发的达芬奇(DaVinci)机器人手术系统的推出,进一步拓宽了微创手术的范畴,引领着微创手术的高新技术和前沿水平发展,微创外科进入了机器人时代[1]。达芬奇机器人手术系统自2000年开始投入临床应用开始,已经在普外科、泌尿科、心血管外科、胸外科、妇科等众多领域进行应用[2],我国于2008年由解放军总医院率先引入后,在张旭教授的带领下,将达芬奇机器人手术系统与传统腹腔镜手术在泌尿外科领域的应用进行了系统探索与有机结合,形成了我国泌尿外科的微创手术技术特色。
达芬奇机器人手术系统的优势主要体现在两个方面,一是3D高清的视觉系统,在腹腔镜端有两个镜头,可实时采集2个同步画面成像于控制台的裸眼3D监视器上,使术者对手术视野的感受等同于开放手术,优于腹腔镜手术的平面视野,其裸眼三维效果也优于3D腹腔镜系统,因为其镜头的放大倍数为10~14倍,所以其对视野局部的放大可以更加精细。另外主刀对镜头的主动控制及无颤动感,更利于主刀思维的体现,降低了助手的劳动强度。二是操控系统,首先是专用的器械具有7个自由度、可以540°转动的腕部关节,为手术带来了无语伦比的灵活性,远优于传统腹腔手术;其次是可以过滤掉主刀的手部颤抖等无效动作,使操作更加精确;再次是机械三臂的使用,使手术辅助器械更能贯彻主刀的意图,且无操作疲劳;最后是机械臂的操作空间及力度,全面强于人手所能控制的力量及范围。
在我们应用达芬奇机器人手术系统的过程中,始终在考虑到底其在泌尿外科的哪类手术中具有绝对优势呢?我们总结考虑认为在如下手术中达芬奇机器人手术系统相对传统腹腔镜技术而言,具有不可比拟的优势:①狭小空间内重建类手术;②纵深范围内复杂操作类手术;③多维多角度缝合类手术;④复杂肾肿瘤的限时类手术;⑤巨大腹膜后肿瘤的分离手术;⑥腔静脉癌栓类手术;⑦腹膜后淋巴清扫重要大血管周边的精细手术。
狭小空间的重建类手术的典型代表是前列腺癌根治性切除术,为了达到前列腺癌根治的肿瘤无残留、尿控及性功能保留等目标,泌尿外科专家们始终在追求更加精细化的手术过程。我们团队在行机器人辅助腹腔镜前入路前列腺癌根治术中,充分利用机器人的上述优势,在游离阴茎背深静脉复合体(dorsal venous complex,DVC )时,通过切开盆底筋膜后,充分暴露尿道与DVC的侧壁,应用3臂抓钳的牵拉显露,准确找到DVC与尿道前之间的无血管层面,我们查阅相关文献,对这个间隙未见明确命名,我们称其为D -U gap(the gap between dorsal vein complex and urethra)(图1A),用单极剪刀剪开D -U gap(图1B),应用马里兰双极钳经剪开的缝隙横向游离D -U gap到达对侧(图1C),将缝扎线牵回,在耻骨前列腺韧带内穿过(图1D),完整保留耻骨前列腺韧带的情况下精准结扎DVC(图1E、1F),在D -U gap之中游离,既不损伤DVC导致出血亦不会伤及尿道,为后续步骤创造清晰的视野。在如此狭窄空间的精细复杂操作,是普通腹腔镜器械所无法完成的。在分离膀胱颈部时,通过牵拉尿管或者通过机械臂挤压产生的组织形变来判断前列腺与膀胱的分界。用单极剪刀从左至右均匀切开前列腺与膀胱分界处。在尿道的左侧和右侧壁沿着前列腺和膀胱的间隙继续深入分离,直至整个膀胱颈尿道的底部完全贯通,做到彻底“管状”保留膀胱颈部尿道组织(图2A),最后完整离断膀胱颈尿道(图2B)[3]。在游离尖部尿道时,我们应用马里兰钳经D -U gap提起DVC(图2C),在钳子下缘离断DVC,精确显露尿道,保留最大尿道长度和耻骨前列腺韧带(图2D),这样既保证无前列腺尖部组织残留,又保证了尿道周围结构及最大尿道长度,尽可能保留尿控功能。最后在膀胱颈部同尿道断端吻合时,我们将前列腺韧带、尿道断端及膀胱后壁狄式筋膜前层精准吻合重建(图2E、2F),最大可能保留控尿机制中涉及的解剖结构。术后漏尿发生几率极低。所以我们认为机器人辅助腹腔镜的前列腺癌根治术中,所有精细化的操作均为高清直视下操作,是真正达到了精准外科的水平,使微创外科的水平得以提升。

图1机器人精准游离结扎DVC与尿道间隙
A:准确找到D-U gap边界;B:用单极剪刀剪开D-U gap;C:经缝隙向对侧游离D-U gap;D:将缝扎线牵回;在耻骨前列腺韧带内穿过;E、F:完整保留耻骨前列腺韧带的情况下精准结扎DVC。
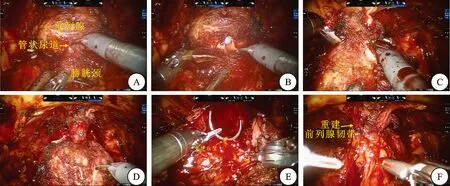
图2 机器人操作尿道的保留及重建
A:“管状”保留膀胱颈部尿道组织;B:完整离断膀胱颈尿道;C:经D-U gap提起DVC;D:保留最大尿道长度和耻骨前列腺韧带;E、F:尿道重建及膀胱前后壁重建。
对于复杂肾脏肿瘤的手术治疗中,局限于传统腹腔镜手术操作器械灵活性差等的局限,对于肿瘤大于4 cm的、生长位置距离肾动静脉、集合系统较近的,甚至深入肾窦内紧贴肾脏血管的肿瘤(图3A),在传统腹腔镜手术中基本选择根治性切除手术,但如在孤立肾、双肾肿瘤或者患者有强烈保留肾脏意愿时,保留肾单位手术则对术者是极大的挑战,主要体现在:一是切除肿瘤时损伤动静脉及集合系统,需要行血管及集合系统的修补;二是肿瘤切除后,肾脏创面的缝合需要极高技巧;三是肾脏热缺血的时间要求尽可能短,以减少肾功能的影响。我们在遇到这类肿瘤时,充分利用机器人手术系统的优势,结合应用肾脏低温灌注技术、虚拟现实三维成像技术(图3B、3C),术中精准分离肿瘤(图3D、3E),成功完成了数十例复杂肾脏肿瘤的保留肾脏手术,为患者减轻了疾病的痛苦。

图3机器人就复杂肾肿瘤的手术策略
A:完全内生性肾窦肿瘤;B:虚拟现实技术应用;C:VR成像中肿瘤与动静脉及集合系统关系;D、E:术中剥离肿瘤情况。
肾盂输尿管连接部狭窄(ureteropelvic junction obstruction,UPJO)是引起上尿路梗阻常见的临床疾病,肾盂成形术是其治疗主要方法。随着泌尿外科微创技术的发展,腹腔镜离断式肾盂成形术逐渐取代了传统的开放手术,术中需要对肾盂输尿管狭窄处进行裁剪,多维多角度缝合,手术难度较高,术者一直在解除梗阻及减少缝合过程中进行平衡,不进行太多范围的积水肾盂壁的裁剪,使得患者术后复查时肾积水形态改变不明显。而且临床中约有20%的UPJO患者合并有肾结石[4]。因腹腔镜器械的局限,合并有结石的UPJO患者往往不能同期处理结石,患者需行二次手术,增加了患者痛苦。另外还有一些第一次UPJO手术失败需再次行肾盂成型术的患者,由于肾脏周围组织的粘连,对再次手术造成极大困难,有时不得不采用开放手术。各个机器人手术中心也在探索机器人辅助腹腔镜肾盂成型术的相关经验[5-6],认为机器人手术系统对于肾盂成形术具有一定优势。我们中心在应用机器人手术系统时,针对不同情况下的UPJO,充分利用机器人手术系统的优势,总结了一套肾盂成形术的经验。一是对于第一次手术的患者,我们利用机器人灵活的手臂系统,在符合离断式肾盂成形手术要求的前提下,充分裁剪肾盂壁,改善术后肾盂形态,可以达到肾积水消失的外观,使患者满意度增加。二是离断的输尿管与肾盂壁的对位缝合,在机器人手术系统高清3D视野下,利用灵活的机器手腕,可以做到精准对位、针距均等、缝合确实(图4A)。因为缝合的牢靠,术后可早期拔出引流管,减少患者的住院时间。三是对合并结石的UPJO患者,我们在基于上述两点的基础上,应用三臂的ProGrasp抓钳,行肾盂及各个肾盏探查取出结石(图4B、4C),可同期处理UPJO合并的结石,减少患者二次手术的痛苦[7]。四是对于二次甚至三次UPJO的患者,其特点为肾盂输尿管连接部因既往手术导致粘连明显,不易分离,肾盂输尿管活动度受限导致重建困难。我们充分利用机器人手术系统的高清视野及精巧的手臂优势,仔细分离粘连组织,充分裁剪肾盂壁及剪除狭窄段输尿管,利用牵引固定、下降肾脏等方法降低吻合张力,精准对位缝合,近半年十余例病例均取得良好效果。

图4利用机器人的优势行UPJO合并结石的同期处理
A:精准对位缝合;B:探查肾盏;C:取出结石。
鉴于本文篇幅所限,各类手术不再赘述,综合上述经验,我们认为达芬奇机器人手术系统相比传统腹腔镜技术,由于其出色的视频系统及灵活的操作系统优势,可以完成很多传统腹腔镜技术不能完成的手术,降低了高难度手术的操作风险,对微创技术的发展起到了变革性的作用,为患者的治疗带来了福音。
参考文献:
[1] 张旭,丁强.机器人技术的沿革与展望[J].微创泌尿外科杂志,2013,2(04):225-226.
[2] 金振宇.中国达芬奇手术机器人临床应用[J].中国医疗器械杂志,2014,38(1):47-49.
[3] 艾青,李宏召,马鑫,等.机器人辅助腹腔镜前列腺根治性切除术中尿控和性功能保留的关键手术技巧[J].微创泌尿外科杂志,2017,6(01):59-61.
[4] BERKMAN DS,LANDMAN J,GUPTA M.Treatment outcomes after endopyelotomy performed with or without simultaneous nephrolithotomy:10-year experience[J].J Endourol,2009,23(9):1409-1413.
[5] 周骏,梁朝朝,方卫华,等.机器人辅助腹腔镜肾盂输尿管离断成形术的初步经验(附21例报告) [J].微创泌尿外科杂志,2017,6(01):43-47.
[6] 蒋昊,刘光香,赵晓智,等.机器人辅助经腹腹腔镜与传统经腹腹腔镜肾盂输尿管成形术治疗肾盂输尿管连接部梗阻的临床对照研究[J].现代泌尿外科杂志,2017,22(07):495-499.
[7] 贾卓敏,时京,陈光富,等.机器人辅助腹腔镜技术同期处理UPJO合并继发结石病例的临床经验总结[J].临床泌尿外科杂志,2017,32(02):105-108.
