播种质量无线传感器网络监测系统设计
——基于多跳多信道和高效中继节点
2018-06-06滕道明
滕道明
(江苏省铜山中等专业学校,江苏 徐州 221116)
0 引言
无线传感器网络是由部置在监测区域内的集成信息采集、数据处理和无线通信功能的大量廉价传感器节点,通过无线通信方式形成,这种网络可在没有基站的条件下通过自组织形成多跳通信网络,因此被广泛地应用在农业、工业控制和环境监测等领域。无线传感网络可在较为恶劣的条件下,获得大量较为精确的可靠数据,播种机在作业(特别是山区作业)时条件一般比较恶劣,如果将无线传感自组织网络引入到播种机质量监测控制系统中,将会有效提高播种机的播种质量监测效率。在多播种机协同作业时,除了使用多跳无线通信网络之外,还可以采用多信道通信的方法,以保证数据的高效传输。因此,探讨高效的中继节点具有重要的意义。
1 智能播种机监控测系统设计
精密播种机在播种作业时可以采用智能检测和通信模块,实现播种精度的自动调节和远程控制,这就需要无线网络的支持;而由于作业条件的局限性,很难直接使用移动基站建立的无线网络。因此,本研究主要采用自组织多跳和多信道通信的方式对播种机监测系统进行设计。其主要模块包括供电模块、PC微处理器、株距监测系统、漏播监测系统、播种速度控制模块和反馈调节模块,如图1所示。
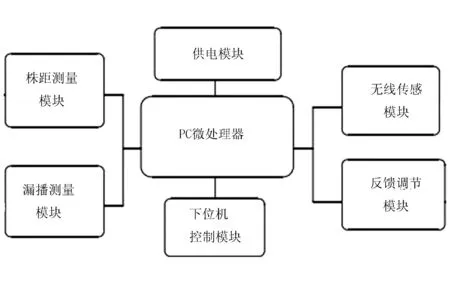
图1 基于多跳和多信道通信的智能播种机监控测系统框架
系统实际使用时,可以通过触摸屏等输入模块输入监测系统的监测参数要求和系统反馈调节系数,通过作业工况的监测实现播种质量的监测和自适应调节,其流程如图2所示。
为了保证系统硬件的高效运转和可靠实现各自的功能,需要采用硬件设备和软件设备结合使用的方法,使用编程软件对每个模块进行编程调试,保证无线传感监测模块、多跳多信道通信模块和反馈调节模块的顺利运行。
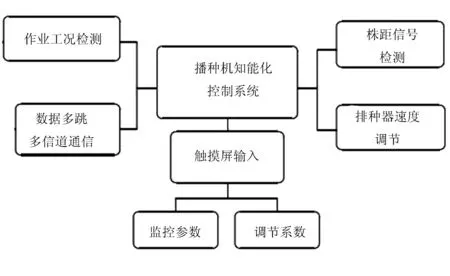
图2 播种质量的监测和自适应调节流程
2 无线传感自组织网络多信道通信和高效中继节点算法
由于播种机作业条件区域不一定存在移动无线网络,所以在实现播种质量远程监测时需要考虑自组织无线局域网,在多农机作业时还需要采用多信道通信技术。多信道通信的原理是采用多组发射天线和多组接收天线,假设多组发射天线为S1、S2、...、Sn,接收天线为Y1、Y2、...、Yn,发射天线S1与接收Y1间距离设为h11,发射天线Sn与接收Yn间距离设为hnm,以4台播种机同时作业时的通信为例,其4×4多信道信号传输的距离为
(1)
假设播种机监测发送信号为X,存在噪声干扰A,则系统的接受信号为
Y=HX+A
(2)
播种机监测系统可以将数据流分为M个,且M的数值需要小于或者等于最小天线数。播种机质量多信道监测系统的容量可以表示为
C=Mlog2(1+S/N)
(3)
其中,S为发射天线数目;N为子载波数目。一个完整的播种机监测系统多信道通信的模型可以表示为
fk=fc+k·Δf
(4)
其中,TN为信道的宽度;X(k)为载波数据;fc为载波频率;fk为第个载波频率;Δf为子载波的频率间隔。在实际进行通信时,需要将相对于的子载波通信数据的正弦和余弦相乘,则信道的接受数据为
exp(i2πfkt)·exp(-i2πfnt)dt
(5)
其中,fn=fc+n·Δf。假设子载波互相正交,则
(6)
在实际进行采样时,零点在Δf的整数倍/置上,对播种监测信号x(t)以Ts/N的速率进行采样,可以得到
(n=0,1,...,N-1)
(7)
其中,x(n)为傅里叶变换。通过对x(n)进行逆变换,可以将通信信号恢复出来,恢复后的信号为
(k=0,1,...,N-1)
(8)
播种机多信道通信系统的调制和解调可以通过离散傅里叶变换和傅里叶逆变换来实现,为了实现多信道的高效通信,需要借助于高效中继节点通信方法。在无线传感网中继节点布局中,洪泛是一种传统的中继节点的布置算法,在多跳移动网和多信道网络中是最常用的,如图3所示。这种布置算法就像洪水泛滥一样被传播到整个无线传感网络,当监测节点达到了最大的跳数,或者通信容量达到最大后便开始对通信网络进行控制。
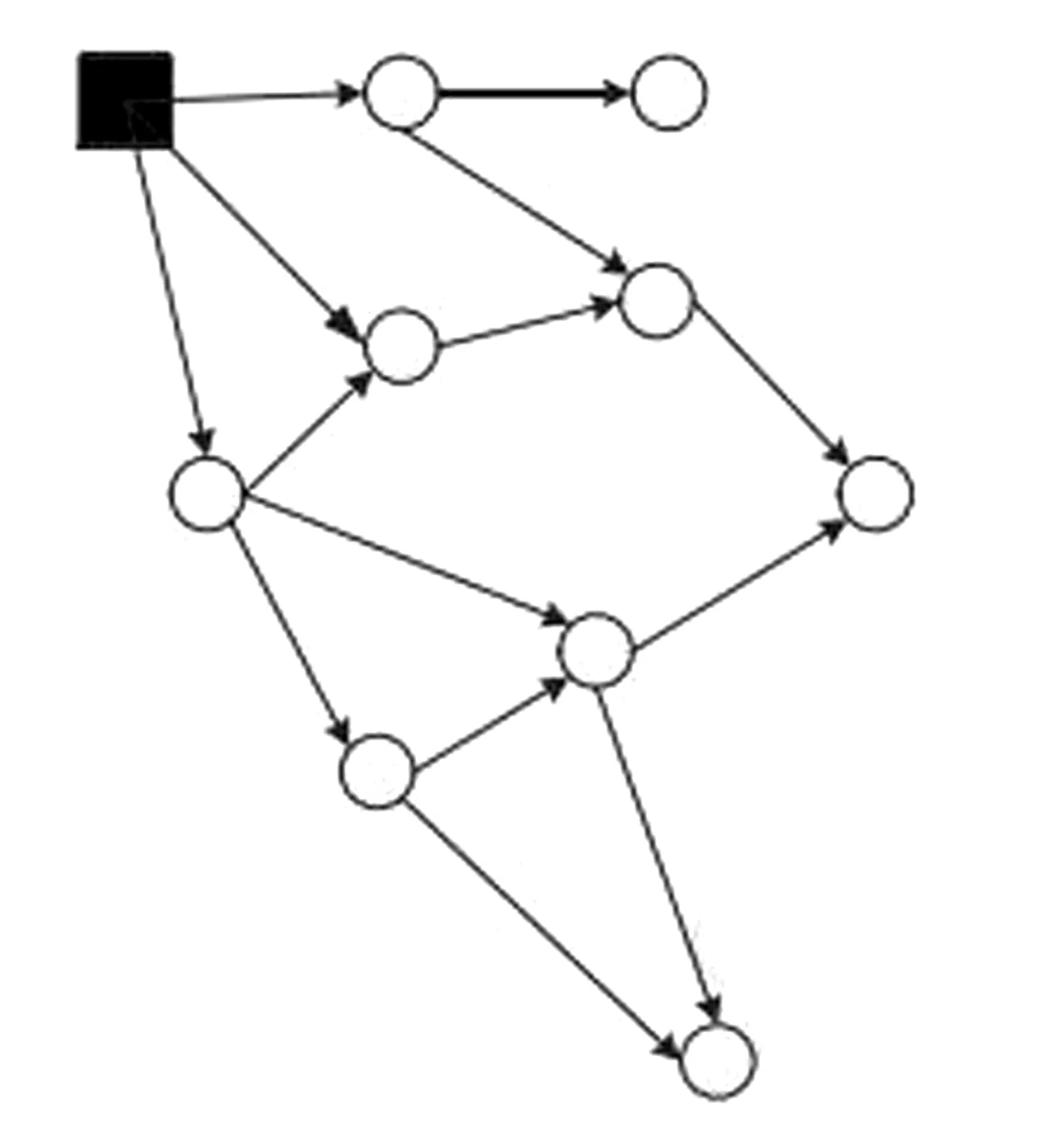
图3 多跳多信道无线通信网络洪泛算法
在洪泛算法中,由于多跳多信道无线通信过程中,其存在很多簇,并且每个簇都有簇头节点,在通信时会存在重叠通信和通信不易被控制等现象。据此采用分层算法对洪泛进行了改进,改进后的模型如图4所示。
图4中,2号节点将命令分别发布到0号节点和6号节点,0号节点和6号节点将数据进行融合,依次将信息传递给各个节点,最终达到2号节点;2号节点待所有数据都汇集完毕后,将信息发送到目的节点。分层算法解决了洪泛算法中经常出现的数据重叠现象,算法采用多跳多信道网络的内部数据结构,使用链型几何模型,降低了模型的复杂程度,从而大大降低了能耗。
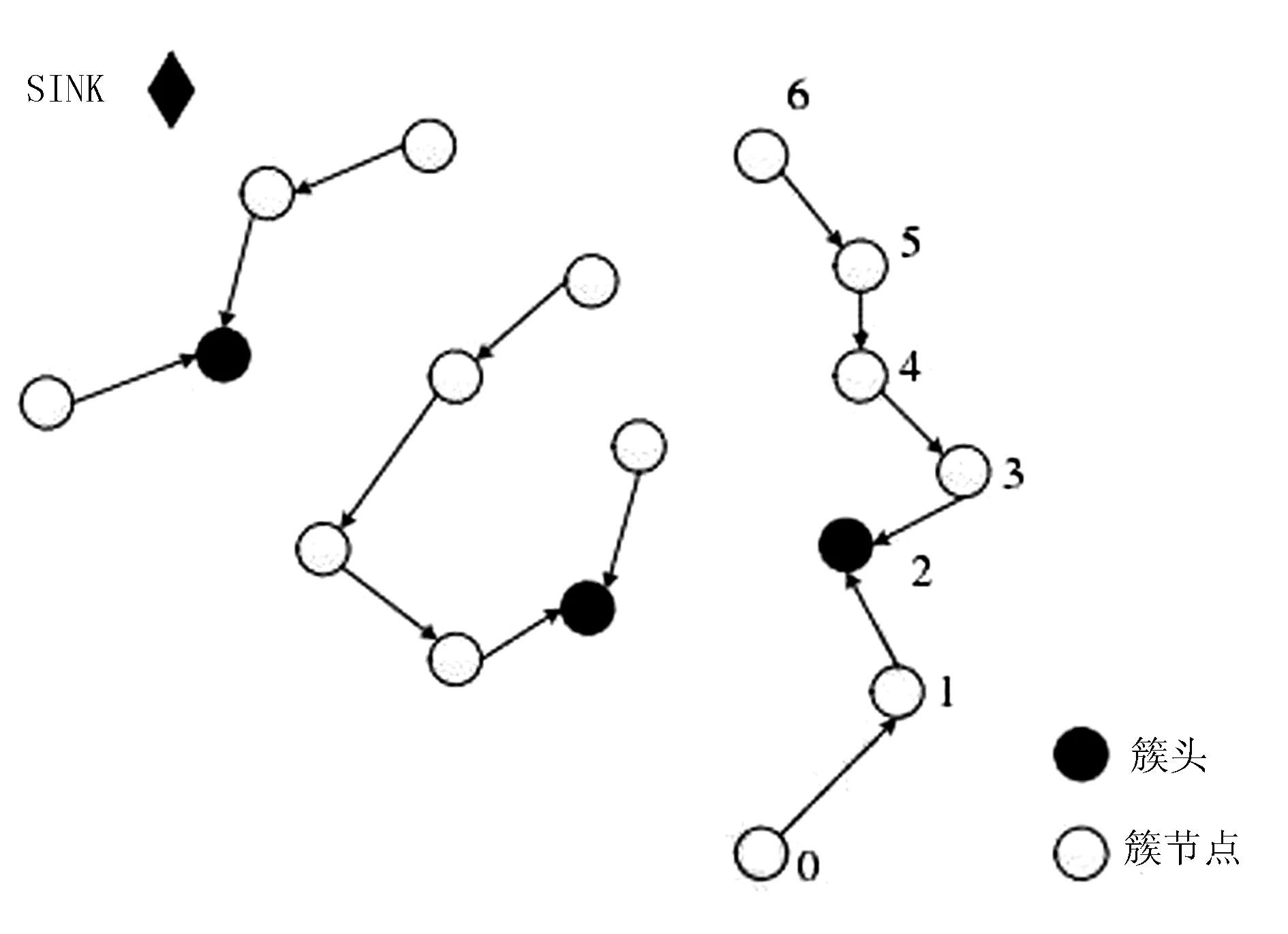
图4 分层中继节点布置算法原理图
3 播种机监测系统测试
为了验证多跳多信道系统在播种机监测系统中使用的可行性,验证高效中继节点在多信道多跳通信过程中发挥的效用,设计了播种机质量监测的测试系统,其原理如图5所示。
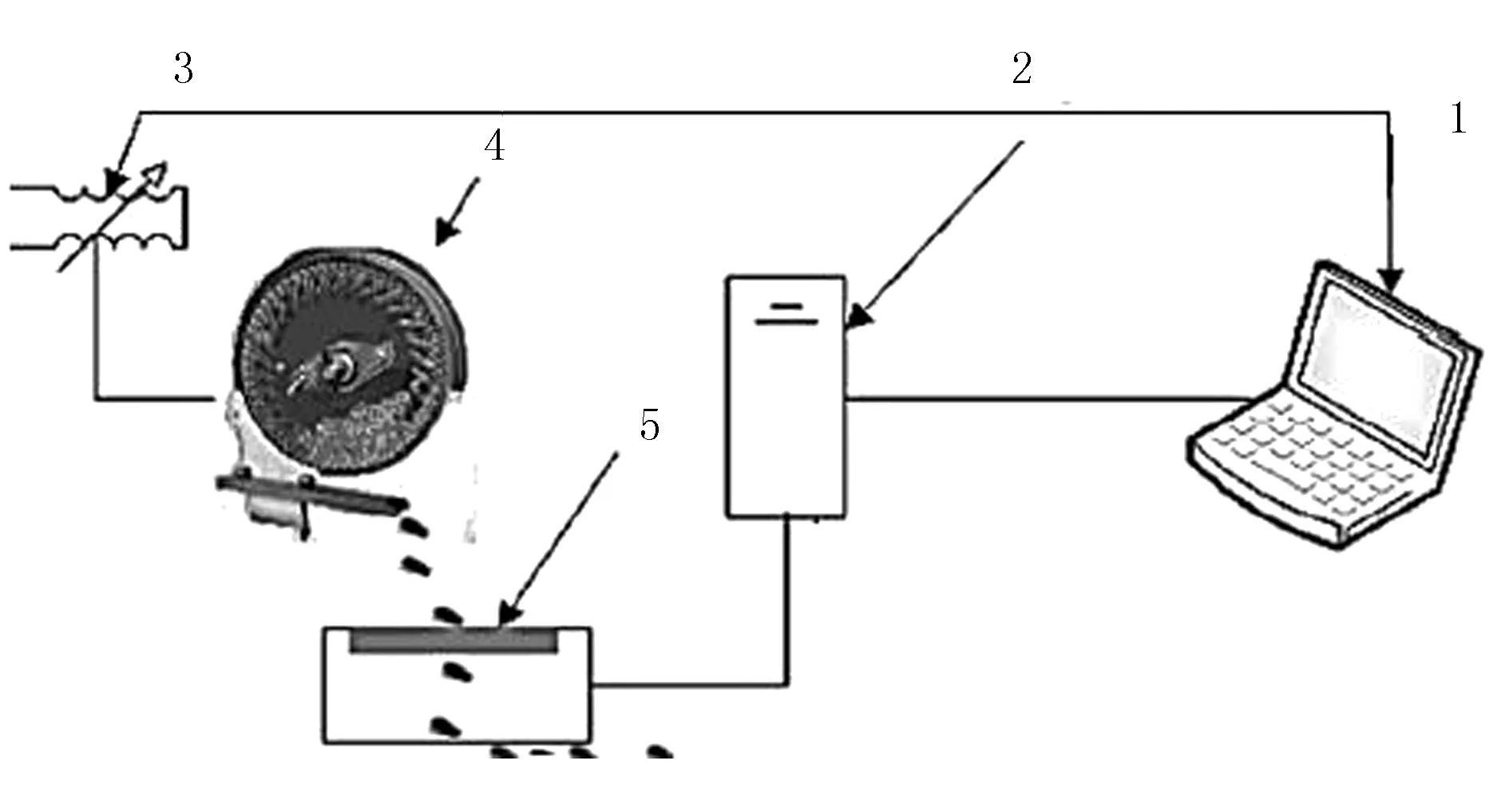
1.无线通信设备 2.无线传感器 3.播种速度控制器 4.排种盘 5.播种监测装置
图5中,测试系统采用闭环控制方式,由无线传感器将测试数据传送给无线传输设备,其网络通信采用本次提出的多跳多信道控制算法,而中继节点采用分层高效节点布局算法。在监测过程中,如果存在播种距离不合格时,反馈系统会通过无线通信自动调整播种速度控制器,改变播种盘的速度,从而实现播种距离的自动校正。
图6为播种机播种质量监测系统的实际测试过程作业场景,播种机选用免耕播种机。为了验证多信道通信的可靠性,在实际作业时,采用多台协同控制的方式,通过测试得到了播种机的播种效果图。

图6 实际播种作业测试过程
图7为采用传统的播种机进行试验测试,得到的播种效果图。由于免耕播种机的播种沟穴开挖宽度较小,因此在播种时经常会出现播种距离不到位的情况,造成播种偏离沟穴现象严重。

图7 传统播种机播种效果
图8为采用多跳多信道高效中继通信对播种控制系统进行改进后,采用反馈调节的方式得到的测试结果。测试结果表明:种子可以正好播在沟穴中央,播种效果比传统播种机的播种效果有了明显的提升。在播种株距为30cm时,对其播种株距指数和漏播指数进一步测试,得到了如表1所示的结果。
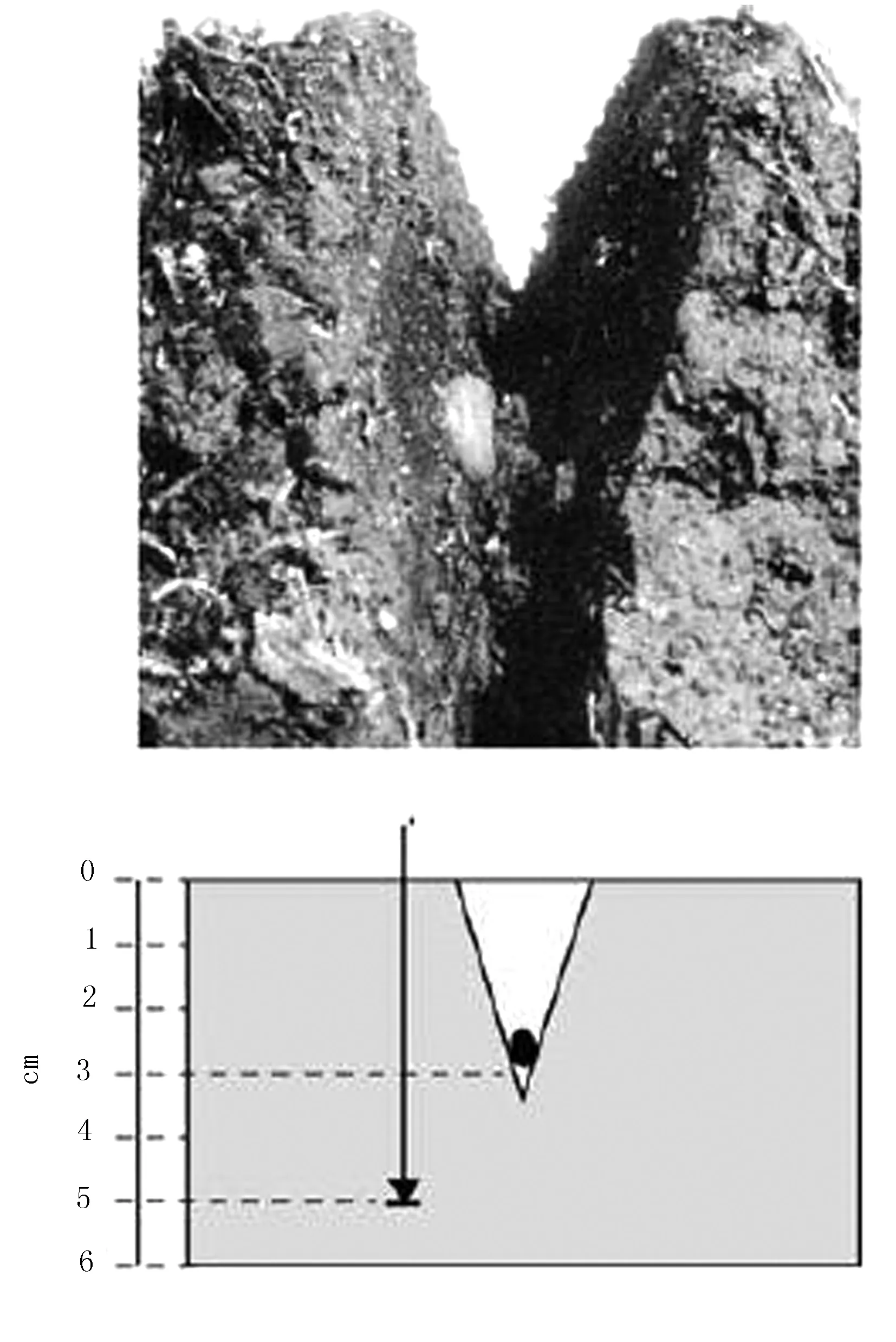
图8 多跳多信道高效中继通信播种机播种效果
表1 株距合格指数和漏播数据测试结果
Table 1 The test result for conformity index and missing data of row spacing
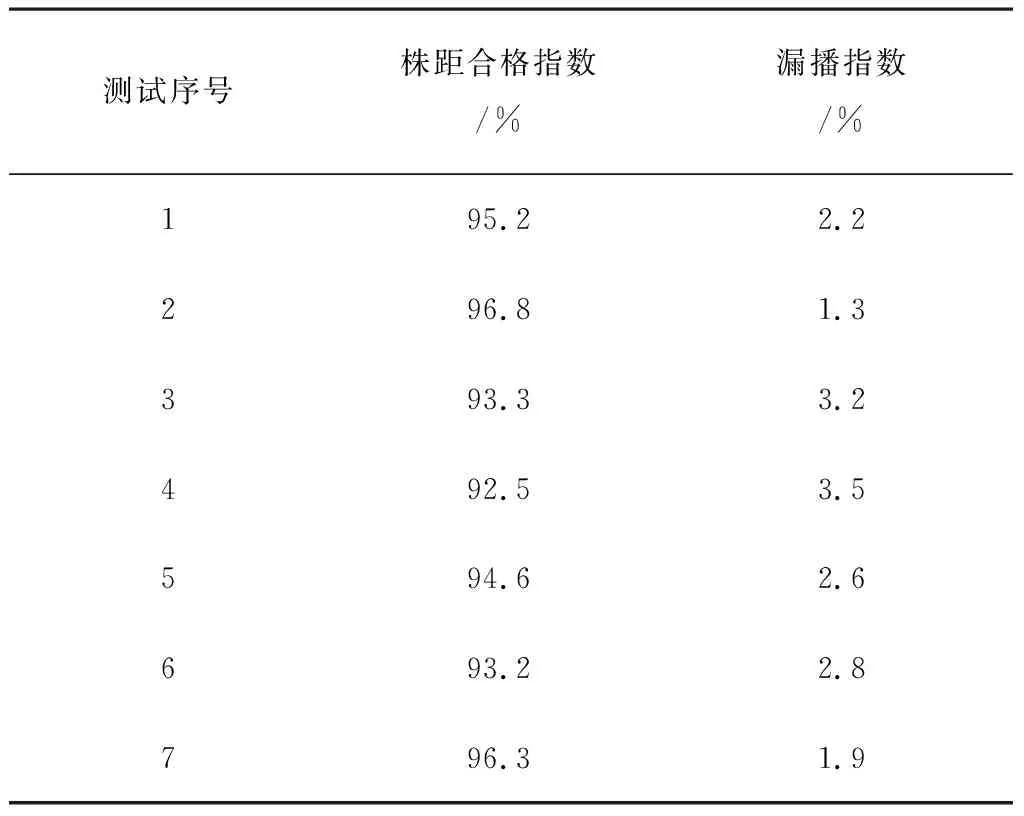
测试序号株距合格指数/%漏播指数/%195.22.2296.81.3393.33.2492.53.5594.62.6693.22.8796.31.9
国家在标准《JB-T10293-2001单粒(精密)播种机技术条件》中关于精密播种机的性能指标做出了指导性的规定,包括株距的合格指数和漏播指数等。当株距大于20cm时,精密播种的株距合格指数需要达到80%以上,漏播的合格率要小于8%。由表1数据可以看出:本次设计的多跳多信道控制系统的精密播种机,其株距合格指数和漏播指数均在要求范围内,符合精密播种机的设计标准。
4 结论
播种质量监测和控制系统是影响播种机作业精度和效率及自动化程度的重要因素,因此在精密播种机监测系统中引入了多跳多信道网络,解决了播种机在信号条件差的山区作业的通信和数据传输问题。为了保证监测系统数据传输的高效性,提出了一种基于分层算法的高效中继节点布置方法。该方法和洪泛算法相比,控制更容易实现,避免了重复通信,提高了通信效率。设计了基于多跳、多信道和高效中继节点的播种机监测测试系统,并对系统进行了测试,将测试结果和传统的播种机进行对比发现:这种系统可以有效提高免耕播种机的播种精度,且其株距和漏播系数满足国家精密播种机的设计要求,为高精度播种机的设计提供了一种新的参考方法。
参考文献:
[1] 邓鑫,张乐君.无线传感器网络可生存性增强技术研究概述[J].传感器与微系统,2014,33(1):1-10.
[2] 徐雄伟,王平,徐世武.无线传感器网络同步算法的研究与探讨[J].单片机与嵌入式系统应用,2012,12(3): 8-11.
[3] 司海飞,杨忠,王珺.无线传感器网络研究现状与应用[J].机电工程,2011,28(1):16-20.
[4] 薛明,高德民.无线传感器网络最大生命期聚合树路由算法[J].传感器与微系统,2014,33(1):130-133.
[5] 崔素辉,陈光亭,李茹雪.三维无线传感器网络的中继器放置问题[J].杭州电子科技大学学报,2010,30(2): 81-84.
[6] 张艳维.无线传感器网络中位置受限的中继器放置问题[D].杭州:杭州电子科技大学,2013:35-40.
[7] 张二鹏,马锃宏,耿长兴,等.温室悬挂喷施机跨垄作业控制系统设计[J].中国农业大学学报,2013,18(6):170-174.
[8] 马锃宏,李南,李涛,等.钵体苗带式供苗移栽机的设计与试验[J].中国农业大学学报,2015,20(3):216-222.
[9] 张春龙,黄小龙,刘卫东,等.苗间锄草机器人信息获取方法的研究[J].农业工程学报,2012,28(9):142-146.
[10] 胡炼,罗锡文,曾山,等.基于机器视觉的株间机械除草装置的作物识别与定位方法[J].农业工程学报,2013,29(10):12-18.
[11] 朱凤武,于丰华,邹丽娜,等.农业机器人研究现状及发展趋势[J].2013,3(6):10-13.
[12] 吴岩,杜立宇,高明和,等.农业面源污染现状及其防治措施[J].农业环境与发展,2011(1):64-67.
[13] 杨慧,刘立晶,刘忠军,等.我国农田化肥施用现状分析及建议[J].农机化研究,2014,36(9):260-264.
[14] 张霞,蔡宗寿,李欢.我国化肥生产能源消费现状分析[J].现代化工,2014,34(10):12-15.
[15] 付丽霞,李云乐.农业面源污染的现状、问题及对策探析[J].食品安全质量检测学报,2014,5(7):2285- 2289.
[16] 栾江,仇焕广,井月,等.我国化肥施用量持续增长的原因分解及趋势预测[J].自然资源学报,2013,28(11): 1869-1878.
[17] 沈德军.农作物叶面施肥的意义、机理及技术要点[J].安徽农学通报,2012,18(12):111-112.
[18] 鱼彩彦.叶面施肥技术在农业生产中的应用[J].农业与技术,2013,33(12):30.
[19] 刘金龙,郑泽锋,丁为民,等.对靶喷雾红外探测器的设计与探测距离测试[J].江苏农业科学,2013,41 (7):368-370.
[20] 高国琴,李明. 基于K-means算法的温室移动机器人导航路径识别[J].农业工程学报,2014,30(7):25-33.
[21] 余根坚.新颖的无线传感器网络组网算法[J].计算机系统应用,2014,23(2):146-149.
[22] 邓昀,程小辉.智能灌溉系统的无线传感器网络设计[J].自动化仪表,2012,34(2):80-83.
[23] 王建新,赵湘宁,刘辉宇.一种基于两跳邻居信息的贪婪地理路由算法[J].电子学报,2008,36(10):1903- 1909.
[24] 胡向东.物联网研究与发展综述[J].数字通信,2010,37(2):17-21.
[25] 李鹏,张瑞霞,王赛超.基于物联网技术的大气环境监测系统研究[J].信息通信,2013(8):59-60.
[26] 李中豪.基于ZigBee的油井无线数据采集系统的设计[J].电子设计程,2011,19(6):110-112.
