翻转式哈密瓜分级装置设计
2018-06-05董冬冬马本学胡洋洋李小霞孙静涛黄成伟毕智健
董冬冬 ,马本学,2 ,胡洋洋 ,蒋 伟,李小霞,孙静涛,黄成伟 ,毕智健
(1.石河子大学 机械电气工程学院,新疆 石河子 832000;2.新疆兵团农业机械重点实验室,新疆 石河子 832000)
翻转式哈密瓜分级装置设计
董冬冬1,马本学1,2,胡洋洋1,蒋 伟1,李小霞1,孙静涛1,黄成伟1,毕智健1
(1.石河子大学 机械电气工程学院,新疆 石河子 832000;2.新疆兵团农业机械重点实验室,新疆 石河子 832000)
针对新疆哈密瓜分级中自动化程度低、分级结果不稳定及效率低下等问题,设计了一种翻转式哈密瓜分级装置。首先通过试验设计水果托盘,增加哈密瓜在传输过程中的稳定性;然后设计分级执行装置,实现哈密瓜的翻转;最后对控制系统原理进行阐述,以实现哈密瓜的准确分级。通过控制系统驱动分级执行装置运转,进而实现水果托盘的翻转,使哈密瓜滚动至分级区域,大大降低了哈密瓜在分级过程中的机械损伤。
哈密瓜;翻转;分级
0 引言
哈密瓜是新疆地区的名优特产,素有“瓜中之王”的美称,含糖量高,奇香袭人,不仅香甜可口,而且营养成分十分丰富,被誉为“水果皇后”。然而,目前哈密瓜采摘后的检测方式主要采用人工分拣方法,效率低下,随意性大,往往带有人的主观因素,造成分选不规范,分选精度低;同时分拣时间长,水果腐烂变质及客户等待时间较长等问题突出,造成资源和时间的双重浪费,致使经济效益下降,最终影响了哈密瓜在市场上的竞争力。因此,对哈密瓜进行自动化分级显得尤为重要。
目前,国内对水果分级装备的研究起步较晚,商品化的水果品质检测分级设备比较少;但是,随着机器视觉技术的发展,有越来越多的学者开始对苹果、柑橘、黄桃等水果的品质特征进行研究,并研制了部分水果检测分级装备[1-7]。由于国内相关技术的不成熟,现有的检测分级装置检测研究对象多为苹果、芒果、猕猴桃、柑橘等小型水果[8-12],而目前针对哈密瓜的分级研究基本上处在理论层面,还没有应用到实际生产中,仍需要进行继续深入的研究。目前,哈密瓜的市场需求量在逐年增加,因此迫切需要一种针对哈密瓜大小分级的设备及技术解决当前的问题。
本研究针对目前新疆哈密瓜主要依靠人工在田间地头进行分级的现状,设计了一种翻转式哈密瓜分级装置。
1 总体设计
本装置主视结构如图1所示,俯视结构示意图如图2所示。

1.主动链轮 2.链条输送带 3.凸轮 4.棘轮 5.承载水果装置 6.支撑轴 7.调速电机 8.对射式激光传感器 9.传感器支撑架 10.从动链轮 11.机架 12.PLC支撑架 13.三菱PLC 14.分级执行装置支撑架 15.同步皮带 16.电动机图1 装置主视结构示意图Fig.1 The main view structure of equipment

1.卸料口 2.链条 3.链条长销轴 4.进料口图2 装置俯视结构示意图Fig.2 Planform of structure equipment
1.1 总体结构
如图1、图2所示,本装置包括机架、进料口、卸料口、传送系统、承载水果装置、控制系统和分级执行装置。传送系统包含电动机、同步皮带、主动链轮、从动链轮和链条输送带;控制系统包含对射式激光传感器、传感器支撑架、三菱PLC和PLC支撑架;分级执行装置包含分级执行装置支撑架、支撑轴、调速电机、凸轮和棘轮。
1.2 工作原理
工作时,电动机带动传送系统工作,传送系统带动承载水果装置工作,哈密瓜由进料口进入承载水果装置。当承载水果装置通过对射式激光传感器区域时,哈密瓜触发对射式激光传感器,按照所触发的对射式激光传感器的对数将哈密瓜分为大、中、小3个等级;对射式激光传感器将信号传给三菱PLC,通过预先设置好的程序使三菱PLC控制相应的调速电机转动,调速电机控制凸轮转动;凸轮通过转动使相应的水果托盘翻转,进而使哈密瓜进入相应的卸料口,实现哈密瓜的分级;拉伸弹簧拉动水果托盘回到初始位置,凸轮继续转动至初始位置后通过与棘轮作用停止转动,等待下一次转动。
1.3 装置特点
该装置的主要特点:①实现哈密瓜的大小分级;②通过翻转式承载哈密瓜装置的设计使哈密瓜实现滚动分级,滚动摩擦相对于滑动摩擦对哈密瓜所造成的机械损伤更小,大大降低了哈密瓜在分级过程中的机械损伤;③减少工人劳动强度,提高哈密瓜的分级效率。
2 哈密瓜承载装置设计
2.1 材料与方法
本次试验材料选用品种为“金皇后(欣源蜜6号)”的成熟哈密瓜样本(见图3),样本个数为100个,产地为新疆兵团农六师103团哈密瓜种植基地。根据当地瓜农的经验和哈密瓜的全生育期(85~110天左右),在哈密瓜成熟期对此种哈密瓜进行两批次采收,每次均采收50个,且采收时间间隔不能超过3天,共得到100组有效试验数据。
根据哈密瓜国家标准GB/T23398-2009[13],在哈密瓜试验样本采摘过程中,通过目测和与有经验的瓜农沟通,剔除掉样本中具有缺陷的哈密瓜。其中,缺陷哈密瓜主要由畸形瓜、网纹不规则或不均匀,以及人为或受外力影响所造成的碰压伤、裂缝和病虫斑等。
1)试验仪器:包括刻度尺(量程30cm)、毛刷、毛巾、小刀、记号笔、标签纸、笔记本。

图3 试验样本Fig.3 Collection of test sample
2)试验方法。
(1)哈密瓜表面清理及编号。对所采收的哈密瓜使用干毛巾进行表面清洗,用小刀切除果梗,并对哈密瓜进行编号,将编号为1~100的记号纸贴在哈密瓜果梗处。
(2)哈密瓜外形尺寸测量。对已经编号的哈密瓜样本,使用高度划线游标卡尺测量哈密瓜样本纵向长轴的长度a、横向短轴的两个长度b和c。其中,短轴的两个长度b、c测量方式是短轴处相互垂直的两个位置进行测量,通过公式(1)求出哈密瓜的球度φ。在测量哈密瓜纵径时需要人工将哈密瓜竖立,由于竖立过程人工参与,可能存在一定的偏差,故此处均采取多次测量取平均值的方法。每个哈密瓜样本的尺寸数据测量3次并详细记录每次所测量的数据,将每个哈密瓜样本的3组试验数据取平均值作为哈密瓜的尺寸数据,并最终以100个哈密瓜的平均横纵经值做为哈密瓜的理论横纵经值。
(1)
单个哈密瓜样本的纵径(以编号为1的哈密瓜样本为例)为
(2)
单个哈密瓜样本的横径(以编号为1的哈密瓜样本为例)为
(3)
(4)
(5)
哈密瓜的理论平均纵径为
(6)
哈密瓜的理论平均横径为
(7)
通过对每一个哈密瓜样本基本物料数据的测定,并对测量数据进行计算、整理和小数位处理,得到100个哈密瓜样本的球度及外形尺寸数据。球度值分布图如图4所示,纵径a尺寸分布如图5所示,横径l尺寸分布如图6所示。

图4 哈密瓜样本球度分布图Fig.4 Sphericity Distribution of Hami melon samples

图5 哈密瓜样本纵径分布图Fig.5 The longitudinal distribution of Hami melon samples

图6 哈密瓜样本横径分布图Fig.6 The transverse diameter distribution of Hami melon samples
通过对所采集的哈密瓜数据进行统计计算可知:哈密瓜果实纵径最大值为25.10cm,最小值为19.80cm,理论均值为22.34cm;横径的最大值为17.50cm,最小值为15.00cm,理论均值为16.17cm;球度φ理论均值为80.67%。
2.2 水果托盘曲线确定
通过对哈密瓜球度的计算,可以看出“金皇后(欣源蜜6号)”品种哈密瓜形状规则,接近于球形,因此需要设计一种类球形的水果托盘。
选取哈密瓜理论平均纵径做为椭圆的长轴r1,哈密瓜理论平均横径做为椭圆的短轴r2,并选定用于设计水果托盘的曲线,如图7所示。

图7 水果托盘设计曲线选择示意图Fig.7 The design curve selection diagram of fruit tray
图7中,r1为哈密瓜理论平均纵径;r2为哈密瓜理论平均横径。以哈密瓜理论平均纵径r2为直径作圆并与椭圆内切,选取角a所对应的圆弧作为设计水果托盘的曲线。
2.3 承载水果装置设计
承载水果装置由转动轴、减震弹簧、水果托盘支撑座、水果托盘缓冲垫、装置支撑座、拉伸弹簧和水果托盘组成。其中,装置支撑座与链条长销轴相联,减震弹簧固定在水果托盘支撑座和装置支撑座之间;水果托盘通过转动轴与水果托盘支撑座联接,其缓冲垫固定在水果托盘支撑座上,拉伸弹簧用于联接水果托盘和水果托盘支撑座。承载水果装置是哈密瓜分级装置中的关键部件,该装置中水果托盘的主要作用是实现哈密瓜承载传送和翻转;减震弹簧和水果托盘缓冲垫主要作用是当哈密瓜由进料口传送至水果托盘时实现减震和缓冲,避免哈密瓜出现损伤;拉伸弹簧的主要作用是当水果托盘翻转后将水果托盘拉回原位置。如图8为承载水果装置结构示意图。
3 分级系统设计
3.1 分级执行装置设计
分级执行装置由凸轮、棘轮、支撑轴和调速电机组成,如图9所示。其中,支撑轴固定在分级执行装置支撑架上,棘轮固定在支撑轴上,凸轮绕支撑轴转动。通过固定在分级执行装置支撑架上的调速电机带动凸轮绕支撑轴转动,凸轮在转动过程中通过与水果托盘作用,驱动水果托盘翻转,进而使哈密瓜翻转并实现哈密瓜的分级;凸轮每次工作后都回到初始位置,通过与棘轮的作用实现凸轮静止。

1.承载水果装置 2.转动轴 3.减震弹簧 4.水果托盘支撑座 5.水果托盘缓冲垫 6.装置支撑座 7.拉伸弹簧 8.水果托盘图8 承载水果装置结构示意图Fig.8 Schematic diagram of structure for carrying fruit
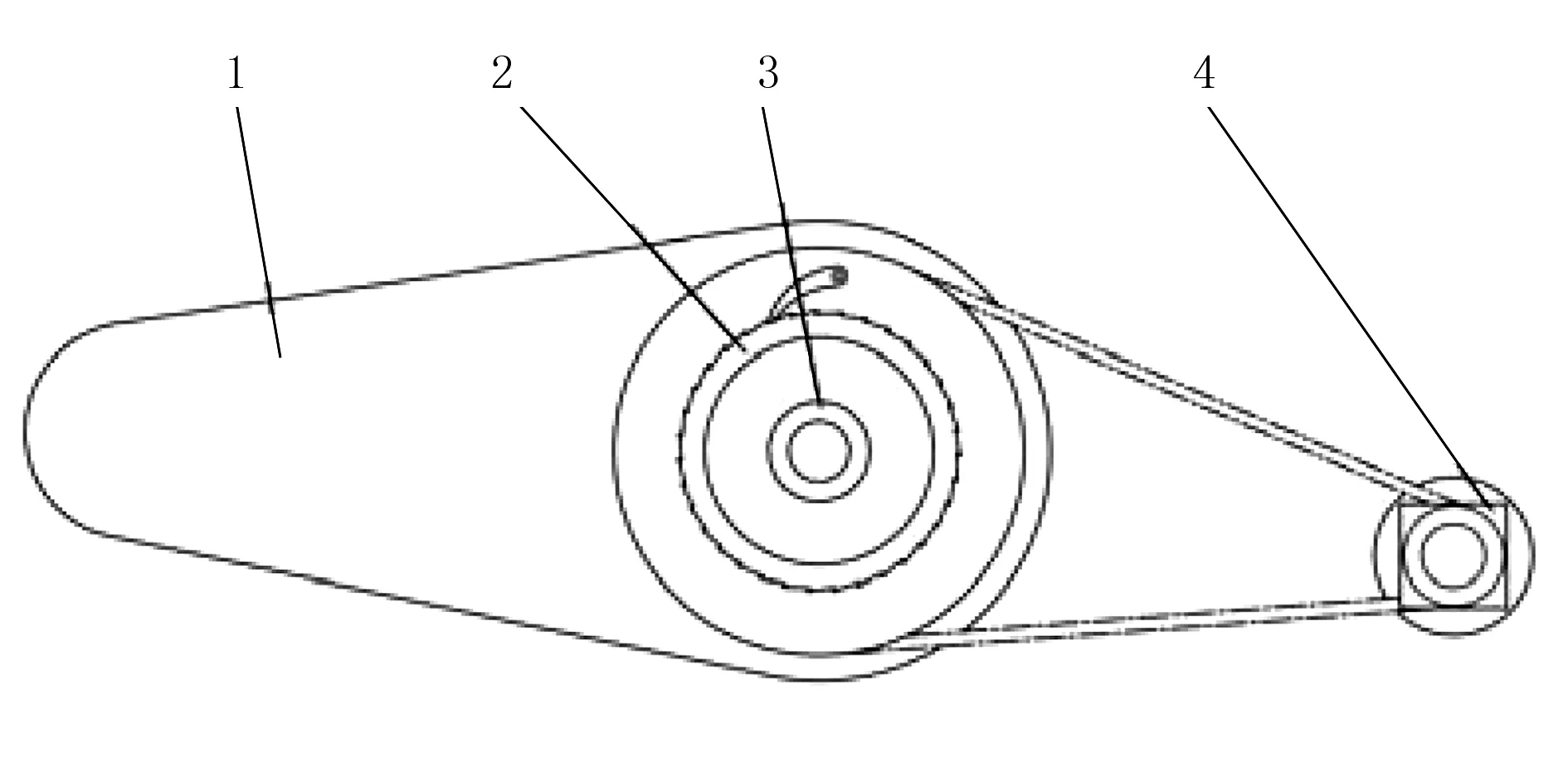
1.凸轮 2.棘轮 3.支撑轴 4.调速电机图9 分级执行装置结构示意图Fig.9 Schematic diagram of classification execution
3.2 分级执行装置工作特点
1)采用凸轮作为执行部件。其中,凸轮、水果托盘和支撑架3个基本构件组成高副机构,可以根据水果托盘所需要的运动规律设计出凸轮的轮廓曲线。
2)通过齿式棘轮机构与凸轮的作用,可以实现该装置的单向间歇式运动,使凸轮在每次完成工作后停在初始水平位置,从而缩短驱动水果托盘翻转的运动时间。
3)调速电机是利用改变电机的级数、电压、电流和频率等方法改变电机的转速,通过使用调速电机可以实现凸轮根据所需要的运动速度转动。
3.3 分级控制系统工作原理
分级控制系统由多对对射式光电传感器、三菱PLC和调速电机组成。首先,通过试验获取哈密瓜相关数据建立哈密瓜质量-纵径数学模型,根据所建立的数学模型确定对射式光电传感器的安装位置,并确定哈密瓜经过传感器时触发传感器个数与哈密瓜质量的关系;然后,PLC通过获取传感器被触发个数的信息间接获取哈密瓜的等级信息,并根据间接获取的哈密瓜等级信息控制相应的调速电机转动;调速电机控制凸轮旋转并驱动水果托盘翻转,最后完成哈密瓜的分级。
4 结论
1)通过试验,设计了水果托盘,确定了其曲线,符合水果托盘的设计要求。其具有较强的实用性,使得哈密瓜与水果托盘能够更好地贴合,防止因局部压强过大导致哈密瓜的损伤。通过缓冲垫和减震弹簧的设计,可以有效地避免哈密瓜的机械损伤。
2)分级执行装置采用凸轮和棘轮设计,并利用凸轮与棘轮的相互作用实现该装置单向间歇式转动,同时可根据水果托盘所需要的运动规律设计适合的凸轮构件,使水果托盘按照合理的运动规律进行翻转,实现哈密瓜稳定、高效的分级。
3)本装置的设计实现了哈密瓜大小的自动分级功能,为新疆哈密瓜的自动化检测分级奠定基础。
[1] 朱培逸,王引佳,高珏,等.基于 PLC和组态王的水果品质分级系统设计[J].农机化研究,2013,35(10):103-106.
[2] 张俊雄,荀一,李伟,等. 基于计算机视觉的柑橘自动化分级[J].江苏大学学报:自然科学版,2007(2):100-103.
[3] 安爱琴,余泽通,王宏强. 基于机器视觉的苹果大小自动分级方法[J].农机化研究,2008(4):163-166.
[4] 刘燕德,吴明明,孙旭东,等.黄桃表面缺陷和可溶性固形物光谱同时在线检测[J].农业工程学报,2016(6):289-295.
[5] 王运祥,马本学,贾艳婷,等. 采用夹持果梗方法的水果检测分级机设计[J].食品与机械,2015(5):107-110.
[6] 葛纪帅,赵春江,黄文倩,等. 基于智能称重的水果分级生产线设计[J].农机化研究,2012,34(1):126-130.
[7] 吴晓强,黄云战,赵永杰. 基于运动控制器的苹果质量分级系统[J].食品与机械,2015(5):114-116.
[8] 李晶,张东兴,刘宝. 苹果分级机输送与翻转机构设计[J].农业机械学报,2009(5):158-161,157.
[9] 李国进,董第永,陈双. 基于计算机视觉的芒果检测与分级研究[J].农机化研究,2015,37(10):13-18,23.
[10] 左兴健,武广伟. 猕猴桃自动分级设备设计与试验[J]. 农业机械学报,2014(S1):287-295.
[11] 卢军,付雪媛,苗晨琳,等.基于颜色和纹理特征的柑橘自动分级[J].华中农业大学学报,2012(6):783-786.
[12] 应义斌,饶秀勤,马俊福. 柑橘成熟度机器视觉无损检测方法研究[J]. 农业工程学报,2004(2):144-147.
[13] 中华人民共和国国家质量监督检验检疫总局.GB/T 23398-2009地理标志产品.哈密瓜[S].北京:中国标准出版社,2009.
更正
在《农机化研究》2017年第10期256~262页《中国农业机械化现状与发展模式》(第一作者为白学峰)一文中,第256页左下角作者简介中作者名字有误,应将“白雪峰”改为“白学峰”。另外,通讯作者鲁植雄的籍贯有误,应将“湖北武学人”改为“湖北武穴人”。
特此更正。
《农机化研究》编辑部
2017年2月7日
ID:1003-188X(2018)02-0128-EA
Design of Flip - type Classification Device for Hami Melon
Dong Dongdong1, Ma Benxue1,2, Hu Yangyang1, Jiang Wei1, Li Xiaoxia1,Sun Jingtao1, Huang Chengwei1, Bi Zhijian1
(1. Mechanical and Electrical Engineering College, Shihezi University, Shihezi 832000, China; 2.The Key Laboratory of Xinjiang Production and Construction Group, Shihezi University, Shihezi 833200, China)
Abstract: Poor levels of automation,disunity criterion,unstable results,low efficiency exists in the classification of Hami melon. A flip-type classification device of Hami melon designed.First,fruit tray designed by experimental to increases the stability of hami melon during the transport;Then,the grading execution device is designed to realize the turnover of Hami melon;Finally,the principle of control system was expounded to realize accurate classification of Hami melon.The classification execution devices are driven by the control system to realized the fruit tray flip,making Hami melon rolling to the classification area,and greatly reduced the mechanical damage of Hami melon in the classification process.
Hami melon; flip; classification
2016-12-09
“十二五”国家科技支撑计划项目(2015BAD19B03)
董冬冬(1992-),男,陕西铜川人,硕士研究生,(E-mail)993479345@qq.com。
马本学(1970-),男,新疆石河子人,教授,博士生导师,(E-mail)mbx_shz@163.com。
S226.5
A
1003-188X(2018)02-0128-04
