悬挂式铧式犁机架有限元分析及基于等强度的优化设计
2018-06-05杨有刚张淑伟
韩 超,杨有刚,张淑伟
(西北农林科技大学 机械与电子工程学院,陕西 杨凌 712100)
悬挂式铧式犁机架有限元分析及基于等强度的优化设计
韩 超,杨有刚,张淑伟
(西北农林科技大学 机械与电子工程学院,陕西 杨凌 712100)
合理的铧式犁机架结构可以保证在相同的牵引力作用下拖拉机能够拖动更大的犁铧,机架所用材料更少,同等作业条件下机架使用寿命更长。为此,利用ANSYS有限元分析软件对经过长期生产实际检验合格的悬挂式铧式犁机架进行静力学及灵敏度分析,模拟真实环境下的工作状态,调整设计并使用基于等强度的设计方法优化结构。结果表明:改进后的机架结构不但节省材料、满足了设计要求,而且在原基础上扩大了承载范围,在相同结构下,改进后的机架能够承载更大的载荷。
铧式犁;有限元;机架;结构优化;标准化设计
0 引言
犁耕是大田农业生产中最重要的工作环节之一,铧式犁是农业生产的重要农机具之一。铧式犁工作时,主要依靠由犁壁与犁铧组成的主犁体曲面对土壤进行入土、切碎、破碎和土垡翻转来实现作业[1]。良好的机架结构有助于主犁体克服来自土壤的粘滞阻力,提升翻垡效率,提升犁体承载能力,提高耕作效率,降低耕作者的劳动强度。因此,本文利用ANSYS有限元分析软件,对经过长期生产实际检验合格的悬挂式铧式犁机架进行静力学及灵敏度分析,并根据实际工作环境下的状态调整设计,并基于等强度的设计方法进行优化结构,以期提供更实用的设计方案,达到保证工作强度需要、降低生产成本的目的。
1 悬挂式铧式犁
1.1 基础结构分析
悬挂式铧式犁主要是由三角牵引悬挂装置、耕深调节装置、机架及主犁体(幅宽1 050mm,耕深270mm)组成。其中,机架主要由三角悬挂牵引装置、犁臂、固定螺栓及制动销等零件构成。机架梁局采用20×60的板材,主体材料为Q235碳钢,切变模量为G=8×1011N/m,机架梁主要连接方式为焊接。
1)悬挂参数:悬挂轴至犁体支撑面的距离h=1.09m,上下悬挂点的距离H1=(犁架柱高度)悬挂轴长度L=0.1m,两下悬挂点间距B=0.51m,两下悬挂点与犁梁的相对位置L1=0.1m。
2)牵引方式:三铧犁正牵引,在实际工作中用东方红X850拖拉机牵引,速度范围v=0.55~0.92m/s,标定功率P=62.5kW ,额定转速n=2 400r/min,输出轴转速为n=720r/min,动力输出轴最大功率Pmax=55.5kW,牵引力为F≥23.3kN,计算时取F=23.3kN。
1.2 机架数据收集与修正
本文所选悬挂式铧式犁机架梁数据来源于本校机械与电子工程学院农机化实验室,具体数据如图1所示。
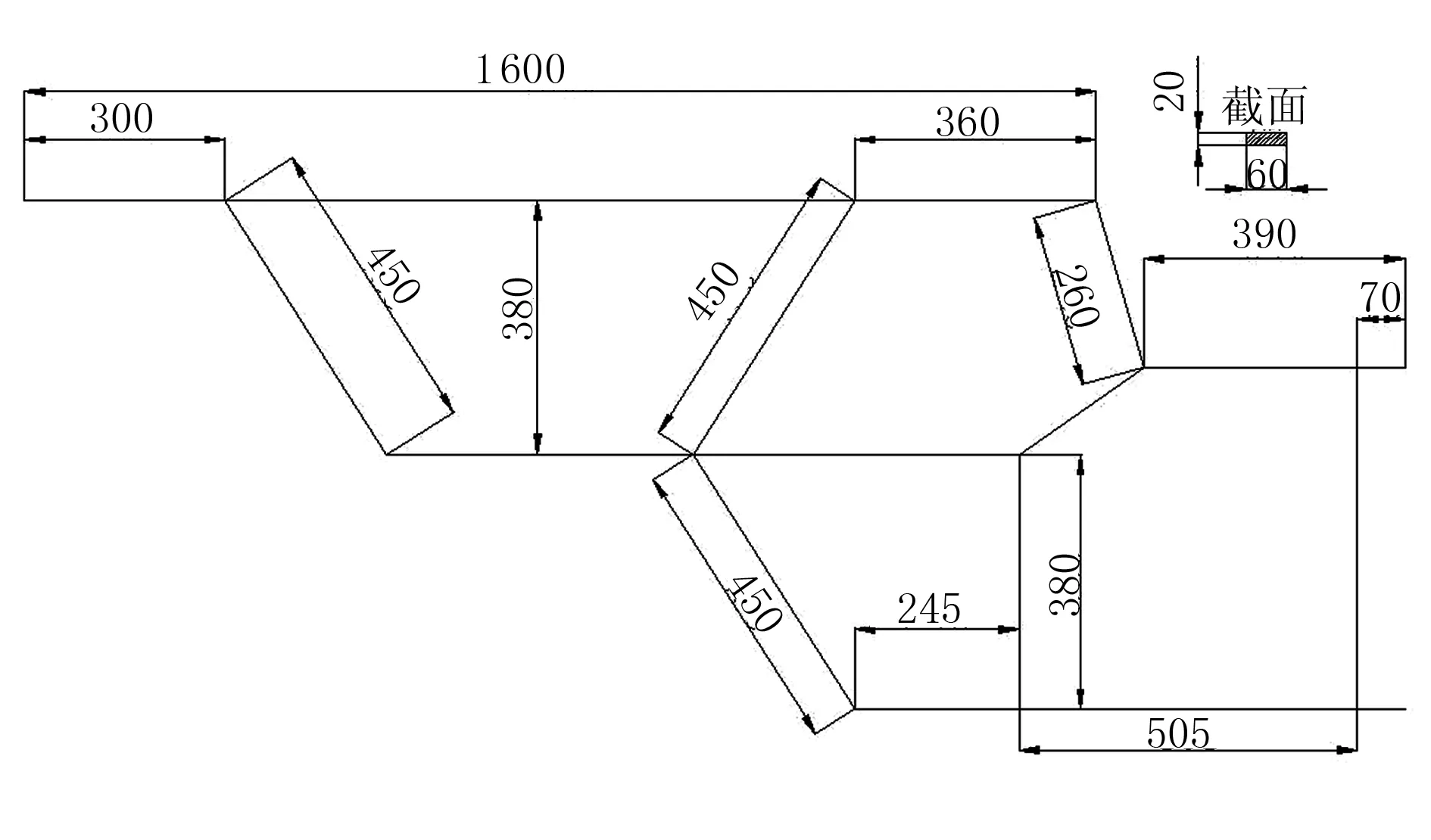
图1 悬挂式机架梁实体数据Fig.1 Solid data of suspended frame beam
实地可测的犁体曲面与前进方向成32°夹角,犁的梁架高度H是指犁架下表面至犁底平面的空间高度。为了保证土壤垡片在犁架下翻转,不产生堆土、堆草现象。一般依据矩形土垡的厚度(按最大耕深计算)与割茬高度的对角线高度计算,即
其中,b为犁体耕宽;amax为最大耕深;h为割茬高度。可得悬挂式铧式犁空间高度为
H=[b2+(amax+h)2]0.5=1.09m
2 简化机架有限元模型
2.1 模型建立
本文采用Pro/E软件建立机架部分的三维实体模型[2],如图2所示。将其导入到ANSYS有限元分析软件中形成CAE模型[3],为了准确模拟悬挂式铧式犁在工作过程中机架的受力状态,采用ANSYS对其进行有限元分析,包括静力学及灵敏度分析。由于在ANSYS 软件中进行分析时圆角、倒角、小孔及凸台等会降低网格质量,使得计算数量急剧增加,所以在本模型中将有影响的小特征去除。悬挂式铧式犁机架采用焊接而成,虽然结构较为简单,焊缝处又可近似认为是刚性连接;但是,为了数据准确性及更好地应用等强度设计方法,在有限元分析时把焊缝单独定义。

图2 导入后机架的CAD模型Fig.2 The frame CAD model after import
根据机架材质,设置材料属性,定义机架的材料为Q235 碳钢[4],材料参数如表1所示。其中,弹性模量为E=2.11×1011N /m2,泊松比为μ=0.3,材料密度为ρ= 7 850kg/m3。
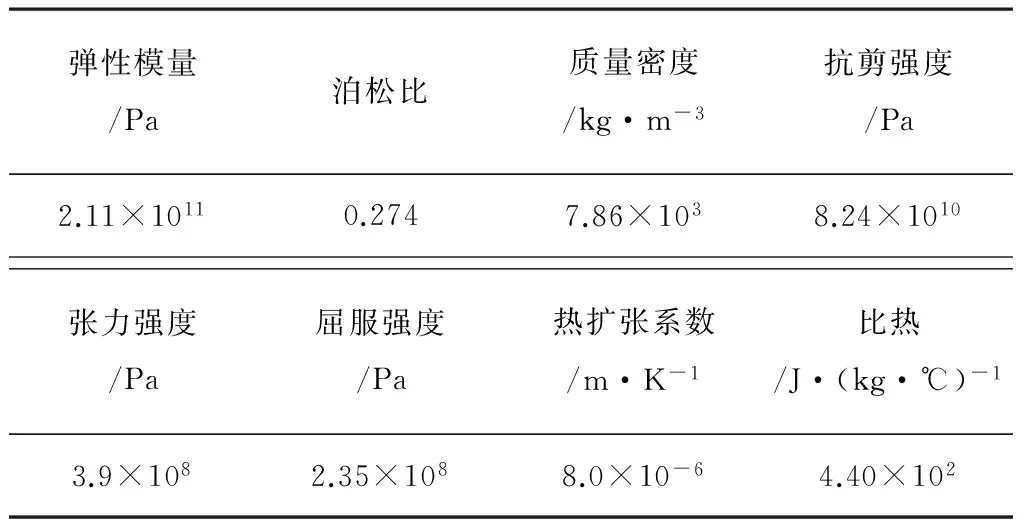
表1 Q235材料参数
2.2 划分网格
网格划分是线性静力分析必不可缺少的一个环节,网格品质的优劣对结果的准确性有着重要的影响。Ansys软件中提供了多种网格划分方法,分别是自动划分法、四面体划分法、六面体主导法、扫掠划分法以及多区划分法。为了保证计算精度,在本次分析中采用Automatic(自动划分法)[4-6]。在Mesh 工具栏下载入Method,然后选择待划分的体,在窗口中的Geometry中单击Apply按钮,单击Mesh设置Sizing尺寸控制网格精度,设置尺寸为3mm,点击Generate Mesh生成网格,如图3所示。

图3 网格划分Fig.3 Grid division
2.3 定义边界条件
在进行边界条件处理时,一种是不添加任何约束,另一种是根据结构的实际工作状况添加相应约束[7]。为了准确模拟铧式犁在工作过程中的受力边界条件,保留犁的几何构造,并对其划分网格,施加最大耕深时的边界条件。此时最大耕深amax=280mm,工作时拖拉机以0.5m/s 速度匀速前行,牵引力F=23.3kN以接触压力的形式加载在犁刀上,3个犁刀上的力P=7.767kN。另外,考虑到铧式犁在设计作过程中通过三点悬挂系统与拖拉机相连,因此在计算时对机架与拖拉机三点悬挂连接处施加固定约束。施加边界条件后如图4所示,Rxy水平面内受力示意图如图5所示。
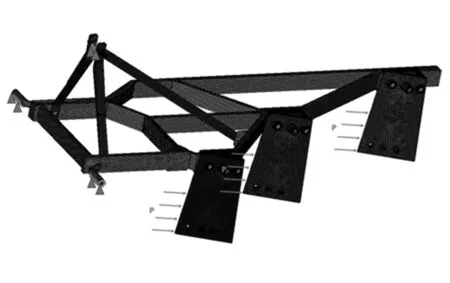
图4 悬挂式铧式犁机架约束图Fig.4 Suspension type plow frame constraint graph
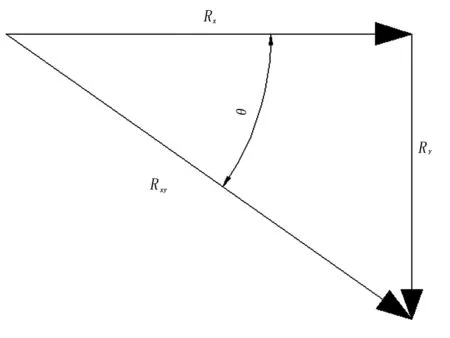
图5 悬挂式铧式犁机架Rxy水平面内受力示意图Fig.5 Hanging plow frame Rxy horizontal plane force diagram
图5中,Rx=F=23.3×103N,Ry=Rxcosθ=14.55×103N。
3 计算结果与分析
本文主要模拟实际生产情况中所受到的主要载荷,对悬挂式铧式犁机架进行有限元静力学和灵敏度分析。
3.1 静力学分析
在Solution 中选择Deformation>Total,在结构树中选中Deformation Total 并求解,可得位移等效云图,如图6 所示。在树结构图中选择Equivalent Stress ,然后求解可得其应变等效云图如图7 所示,所得的Von-mises应力云图如图8所示。
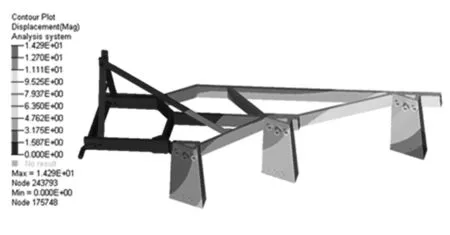
图6 悬挂式铧式犁机架位移等效云图Fig.6 Suspension type plow frame equivalent displacement nephogram
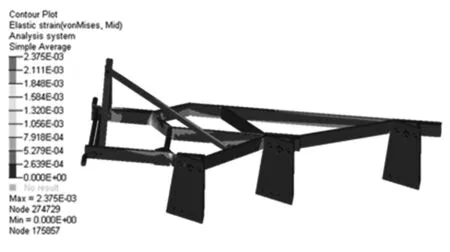
图7 悬挂式铧式犁机架应变等效云图Fig.7 Suspension type plow frame equivalent strain nephogram
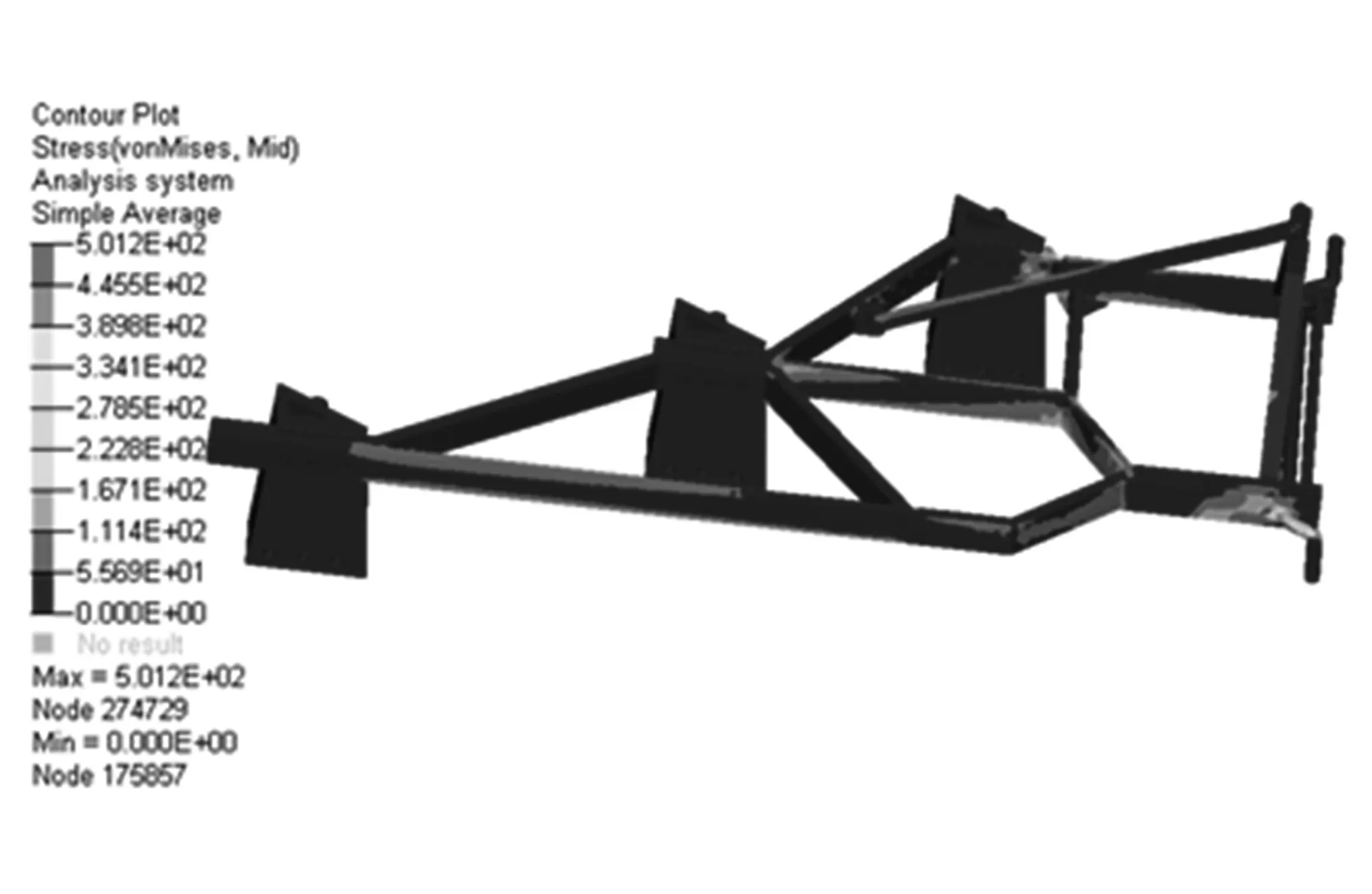
图8 悬挂式铧式犁机架Von-mises应力云图Fig.8 Suspension type plow frame equivalent Von-mises stress nephogram
由图6可知:悬挂式铧式犁的最大位移出现在第3个犁刀上,变形量约为14.3mm,主要是由于钢架扭转造成的。结合应变云图可以明显地看出,这部分位移量是刚体位移。
由图7可以看出:机架上的最大应变主要出现在肋板连接位置。
由图8可以看出:机架结构上的大部分结构的应力都较小,集中在55MPa左右,远小于屈服极限235MPa。这说明,结构可以进行优化的空间很大。另外,最大应力500MPa出现在立板的连接处,是因为采用刚性连接所致,不影响最后结果。
由于应力较大的部位分别位于肋板、前面支架与犁的连接处、右前悬挂连接处,因此单独对相应的3部分进行拆分分析。肋板应力较大处的云图如图9所示,前机架应力较大处的云图如图10所示,悬挂连接处的应力云图如图11所示。

图9 肋板应力较大处的等效应力云图Fig.9 The equivalent with strong floor stress nephogram
图9中,最大应力为285.43MPa。前面支架与犁的连接处应力也较大,最大应力为301MPa,如图10所示;右前悬挂连接处的应力较大,最大应力为339.6MPa,如图11所示。这3处的应力都超过了Q235钢的屈服极限,存在强度不足的问题,需要进行补强处理。

图10 前机架应力较大处等效应力云图Fig.10 The frame stress before a big equivalent stress nephogram
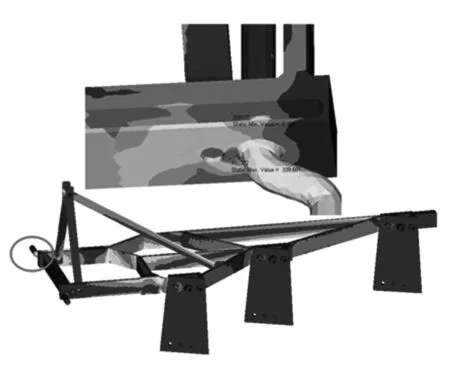
图11 悬挂连接处的等效应力云图Fig.11 The equivalent stress nephogram of hanging junction
3.2 灵敏度分析
为了对悬挂式铧式犁机架结构进行优化,首先确定设计变量,所以要进行灵敏度分析。这里选取了12个设计变量,均为悬挂式铧式犁机架钢结构的厚度,如图12所示。

图12 悬挂式铧式犁机架设计变量示意图Fig.12 Hanging furrow plough frame design variable map
灵敏度分析所用的状态变量为最小体积(减重需要)与图9~图11中所示危险区域的应力(强度需要),最后灵敏度分析如表2所示。

表2 灵敏度分析表
由表2可以看出:变量dv_11、dv_12、dv_8、dv_7对最小体积影响较大,而dv_1、dv_12、dv_6、dv_5对危险区域的应力影响较大。综合考虑,选取dv_1、dv_7、dv_8 、dv_11、dv_12、作为优化时的设计变量。
4 机架结构的优化分析
对悬挂式铧式犁机架梁基于等强度标准化设计方法进行结构优化,主要考虑灵敏度影响比较大的因素,在保证设计要求的情况下减少用材。所以,在对悬挂式铧式犁进行结构优化时,设计变量为dv_1、dv_7、dv_8 、dv_11、dv_12,如图13所示。
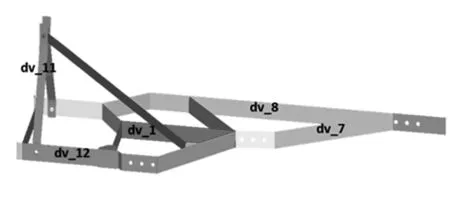
图13 悬挂式铧式犁机架优化变量示意图Fig.13 Hanging furrow plough frame diagram optimization variables
约束条件为:图9~图11中的应力小于屈服极限235MPa。
对悬挂式铧式犁机架进行基于等强度设计理论和目标变量设计方法进行优化,结果如表3所示。
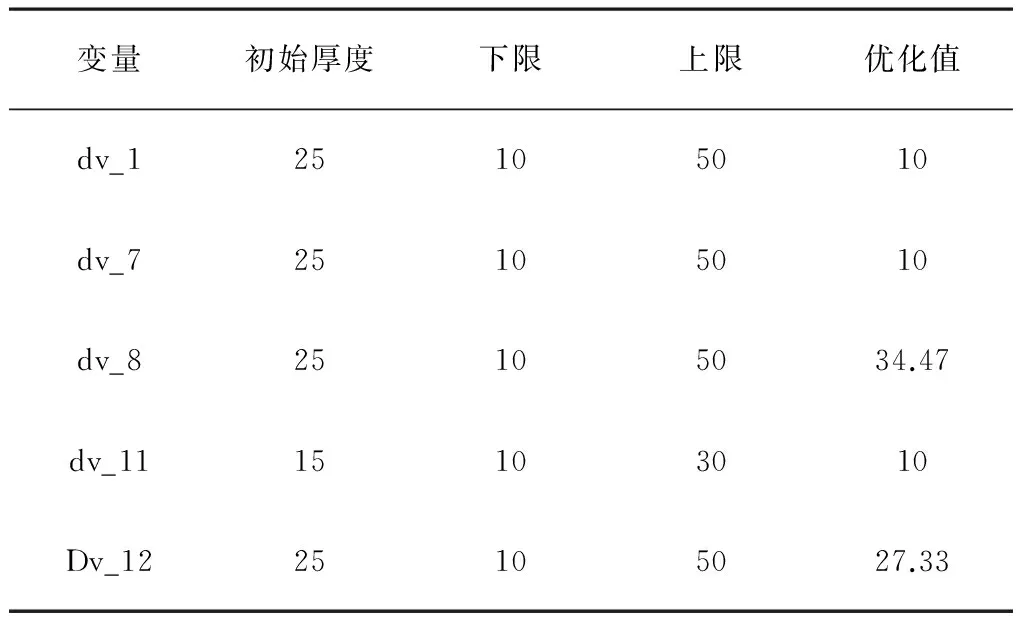
表3 悬挂式铧式犁机架尺寸优化结果
对优化后的悬挂式铧式犁机架结构利用Pro/E进行建模,之后在导入ANSYS中进行静力学分析,为保持条件一致,施加的载荷及边界条件与未优化时的相同。经静力分析后,得到的位移云图如图14所示,应变云图如图15所示,Von-mises应力云图如图16所示。
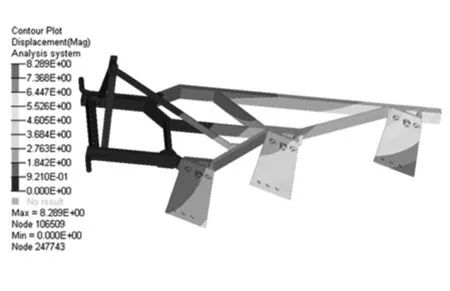
图14 改进后悬挂式铧式犁机架等效位移云图Fig.14 The improved hanging furrow plough frame equivalent displacement nephogram
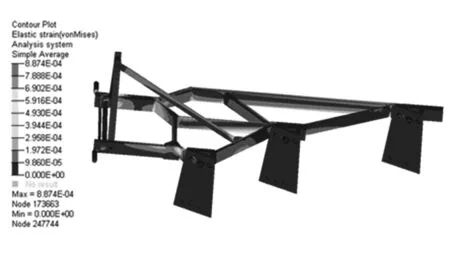
图15 改进后悬挂式铧式犁机架等效应变云图Fig.15 The improved hanging plow frame strain nephogram

图16 改进后悬挂式铧式犁机架等效Von-mises应力云图Fig.16 The improved hanging furrow plough frame equivalent Von-mises stress nephogram
改进后,悬挂铧式犁机架梁静载荷作用下,应力分布等效云图中应力分布均匀,机架梁整体应力变化减小。由图14与图15可以看出,优化后的位移与应变都有较大的降低;由图16可以看出,优化后的结构的最大应力为192.1MPa,远小于屈服极限235MPa。这说明,优化后的结构是可靠的。
5 结论
通过对悬挂式铧式犁机架进行有限元静力学分析,得到了机架的应力、应变以及位移云图。通过分析等效云图可以看出:机架在承受静载荷失效时,会从多个点处同时发生失效,最薄弱环节在应力较大的部位,分别位于肋板、前面支架与犁的连接处,以及右前悬挂连接处。进行灵敏度分析有助于对现有的悬挂式铧式犁机架进行等强度设计方法的结构优化。从优化结果可以看出:改进后的机架能够承载更大的载荷,改进后的位移与应变都有较大的降低,应力变化均匀。通过对悬挂式铧式犁机架进行有限元分析,为机架的改进设计提供了理论依据,为实际应用及标准化设计提供了参考。
[1] 镇江农业机械学院.农业机械学[M].北京:中国农业机械出版社,1981.
[2] 李耀明,孙朋朋,庞靖,等.联合收获机底盘机架有限元模态分析与试验[J].农业工程学报,2013,29 (3):38-42.
[3] 佚名.ANSYSWorkbench15.0—有限元分析从入门到精通[M].北京:机械工业出版社,2014.
[4] 吕廷,石秀东,张秋菊,等.基于 ANSYS 的破碎机机架模态分析[J].机械设计与制造,2008(11):99-101.
[5] 凌桂龙,丁金滨,温正.ANSYS Workbench13.0从入门到精通[M].北京: 清华大学出版社,2012:137-138.
[6] 刘选伟, 金亮,王景立.基于ANSYSWorkbench深松机机架模态分析[J].农机化研究,2015,37(5):29-31,35.
[7] 哈尔滨工业大学理论力学教研室.理论力学(I)[M].北京:高等教育出版社,2002.
[8] 李超群,杨文彩,杨航,等.基于ANSYS三七播种机机架模态及谐响应分析[J].制造业自动化,2015(7):77-79.
ID:1003-188X(2018)02-0061-EA
Suspension Bottom Plow Frame Finite Element Analysis and Optimization Design Based on Equal Strength
Han Chao, Yang Yougang, Zhang Shuwei
(College of Mechanical and Electronic Engineering, Northwest A&F University, Yangling 712100,China)
Abstract: Reasonably designed plow frame structures can ensure the tractor to drag a larger plow under the same traction effect, racks with less material and longer service life under the same operating conditions. In this study, ANSYS finite element analysis software was used to perform the static analysis and sensitivity analysis for hanging plow frame to be qualified through actual production test, and adjust the design by simulating the real environment of working condition to optimize the structure based on the method of equal strength . The results indicated that improved chassis could carry larger loads in the same structure after extending the load range on the basis of the original.
bottom plow; finite element; frame; structure optimization; standardized design
2016-11-22
陕西省专项资金项目(K332021313);国家自然科学基金项目(41101201)
韩 超(1991-),男,山东章丘人,硕士研究生,(E-mail)hc_runner@163.com。
杨有刚(1961-),男,西安人,教授,硕士生导师,(E-mail)yangyougang@nwsuaf.edu.cn。
S222.12+1
A
1003-188X(2018)02-0061-05
