基于UG对卧式杠杆木薯拔起装置的设计和运动仿真
2018-06-05叶自旺马彦杰
王 勇,叶自旺,芦 迪,董 振,马彦杰
(广西大学 机械工程学院,南宁 530004)
基于UG对卧式杠杆木薯拔起装置的设计和运动仿真
王 勇,叶自旺,芦 迪,董 振,马彦杰
(广西大学 机械工程学院,南宁 530004)
目前,木薯的拔起工作大部分仍然采用手工方法进行,虽有大型的木薯采收装置,但不太适合于广东、广西、贵州等地区的丘陵地带,且大型设备的投入成本高,在农村地区的产品推广存在着很大的阻力。为了解决农民收获木薯过程中手工收获速度慢、容易伤手等问题,提出了一种卧式杠杆木薯拔起装置的机械,并在此之前申请了国家发明专利。运用UG对该机械进行设计及运动仿真,实现木薯拔起的机械化夹持与拔起,以降低木薯拔起的劳动强度,还能够提高木薯采收效率、木薯种植业的经济效益和产品化水平,满足木薯产业的增长需求。
木薯拔起装置;运动仿真;UG
0 引言
木薯是一种用作饲料和提取淀粉的原材料,提取产物广泛应用于食品工业及非食品工业,需求极大,但是目前木薯的拔起工作主要依靠手工,且木薯主要种植在山地等地,土地紧实,不易拔起,单纯依靠手工拔起劳动强度大,采收效率低,纯手工的木薯采收难以满足日益增长的木薯需求。
为了解决纯手工的木薯采收劳动强度大等问题,提出了一种卧式杠杆木薯拔起装置。为应对在实际拔起过程中木薯秆的夹持及方向问题,在机械设计的过程中进行了较好的适应性设计,实现了木薯夹持工作的自锁功能及拔起的多自由度,并为需要达到的设计目标对设计方案进行运动仿真,确定该机械的可行性设计及设计方案。在实际中对该装置进行实验,获得实验数据,以此来优化该装置的结构及零部件的尺寸,保证卧式杠杆木薯拔起装置的拔起力和采收率,在满足社会需求的情况下,实现木薯拔起的机械化夹持与拔起。
1 结构设计及工作原理分析
1.1 结构设计
卧式杠杆木薯拔起装置主要由3部分组成,分别为双齿轮驱动夹持木薯拔起机构、蜗轮蜗杆自锁木薯拔起机构及多自由度木薯拔起机构。其中,双齿轮驱动夹持木薯拔起机构能够利用外啮合齿轮转向相反的原理实现装置的夹持工作;蜗轮蜗杆自锁木薯拔起机构能够将作用在把手上的力通过蜗轮蜗杆带动双齿轮的夹持工作,同时还能够利用其自身具有的自锁功能,使得夹持机构能够紧紧地夹持住木薯杆;多自由度木薯拔起机构则处于装置的底部,用于实现在实际运转中需要在水平和垂直方向上的调整。运用三维造型软件UG对其进行三维造型,具体结构如图1所示。

1.把手 2.蜗杆 3.右轴承座 4.转动手轮 5.支撑板 6.弹簧 7.弹簧连接杆 8.转动轴 9.导槽 10.支架 11.后轮 12.前轮 13.轴承 14.从动转动轴 15.齿轮固定板 16.右夹持手柄 17.从动齿 18.左夹持手柄 19.主动齿 20.主动齿转动轴 21.蜗轮 22.左轴承座图1 卧式杠杆木薯拔起装置的三维造型Fig.1 The three-dimensional model of the horizontal lever cassava pull up device
1.2 关键部分设计
1.2.1 双齿轮的结构设计
在进行双齿轮驱动夹持木薯拔起机构的设计时,由于需要保持两夹持手柄的转动角度相同,其传动比应该要满足以下要求,即
式中z1—主动齿的齿数;
z2—从动齿的齿数;
i12—主动齿对从动齿的传动比。
经过严格的设计计算后,最终确定了该双齿轮驱动夹持木薯拔起机构的主要参数如表1所示。

表1 双齿轮的主要参数
1.2.2 蜗轮蜗杆的结构设计
考虑到蜗轮蜗杆在实际工作中传动平稳性及蜗轮滚刀切制蜗轮时产生根切与干涉的问题,将蜗轮蜗杆设计成如表2所示的参数。

表2 蜗轮蜗杆的主要参数
其中,传动比的计算如下,即
式中z3—蜗杆的头数;
z4—蜗轮的齿数;
i34—蜗杆对蜗轮的传动比。
1.2.3 关键部分的传动比计算
在上面对双齿轮驱动夹持木薯拔起机构及蜗轮蜗杆的设计参数中得到了双齿轮、蜗轮及蜗杆的齿数(头数)的具体数据,由此可得到运动的输入端与输出端的转速比。由于蜗轮与从动齿连接在同一根转动轴上,则其公式为
式中z3—蜗杆的头数;
z4—蜗轮的齿数;
i34—蜗杆对蜗轮的传动比;
i31—蜗杆对主动齿的传动比。
1.3 卧式杠杆木薯拔起装置的工作原理分析
卧式杠杆木薯拔起装置是一种能够实现木薯拔起的机械化夹持与拔起的农业机械设备,其整体运动是靠人力推动把手使得该装置向前运动,通过转动手轮带动蜗轮蜗杆转动进而驱动双齿轮运动,实现该装置的夹持运动。通过以转动轴的轴心为支点,作用在把手上的力为主动力,作用在夹持手柄上的力为阻力,实现装置的拔起功能。
在双齿轮驱动夹持木薯拔起机构中,用右转动夹持手柄调节螺栓和左转动夹持手柄调节螺栓,使得右夹持手柄和左夹持手柄分别与从动齿转动轴和主动齿转动轴连接在一起,使得夹持手柄随着齿轮转动轴的转动而转动;利用外啮合齿轮的齿轮转动方向相反的特点,当主动齿顺时针转动时,从动齿逆时针转动,左夹持手柄和右夹持手柄会靠近,从而进行木薯杆的夹持工作。
在蜗轮蜗杆自锁木薯拔起机构中,通过转动手轮带动蜗轮蜗杆转动进而驱动双齿轮运动,实现该装置的夹持运动;同时,利用蜗轮蜗杆的自锁原理,可以将木薯杆紧紧地夹持住,方便木薯的拔起工作。此外,通过往下压把手,以转动轴的轴心为支点,作用在把手上的力为动力,作用在夹持手柄上的力为阻力,形成一个杠杆机构,从而实现木薯的拔起工作。
在多自由度木薯拔起机构中,通过转动轴的作用,可以实现铅直方向的转动,从而实现木薯的拔起运动;通过导槽轮在左导槽和右导槽的滑动,实现水平方向的进给运动;通过转动轴承的作用,实现水平方向的旋转运动,从而在夹紧木薯杆的情况下,左右摆动把手,使得木薯杆的根部松动,便于进行拔起工作。此外,还能够利用弹簧的弹性作用实现装置的自动复位功能。该装置的多自由度设计能够满足绝大部分的社会的生产需要,具有很好的应用前景。
2 对卧式杠杆木薯拔起装置的动态仿真
在UG中做好三维造型后直接在UG中进行运动仿真,其目的在于验证机械的可运行性及是否存在机械运动过程中的零件干涉问题。模拟该装置在实际使用过程中的运动情况,从而优化卧式杠杆木薯拔起装置的结构。图2中,对装置的整体进行了仿真约束,主要对其在实际工作中所具有的运动进行约束,真实再现了卧式杠杆木薯拔起装置的工作环境。整体仿真约束如图2所示。
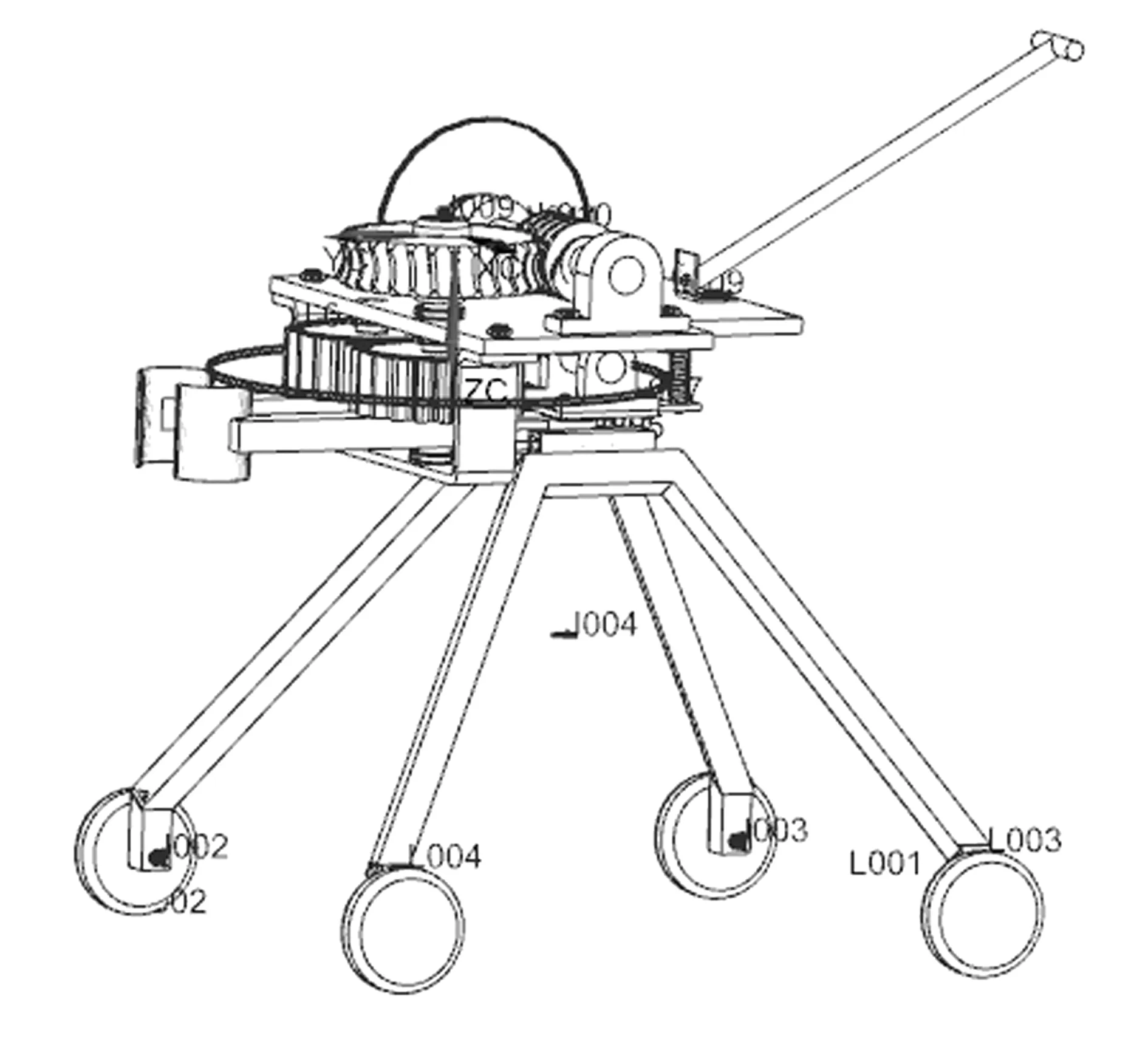
图2 卧式杠杆木薯拔起装置仿真约束图Fig.2 The graph of the horizontal lever cassava pull up device simulation
2.1 主要工作部位的动态仿真
蜗轮蜗杆及双齿轮驱动夹持部分是装置的重要组成部分。蜗轮蜗杆的自锁作用能够使得装置紧紧地夹紧木薯杆,方便木薯的夹持和拔起工作;而双齿轮驱动夹持部分则利用外啮合传动齿轮的旋转方向相反,实现夹持手柄的夹持作用。在图2中对装置的整体进行了仿真约束,着重对该装置的蜗轮蜗杆及双齿轮驱动夹持部分进行分析,以此得到了卧式杠杆木薯拔起装置的夹持机构的旋转范围,如图3所示。

图3 双齿轮驱动夹持木薯拔起机构的旋转角度范围图Fig.3 The figure of rotation angle range in the Pairs of gear drive clamping cassava pull up
对夹持手柄进行安全计算以及夹持手柄运动时干涉的分析,其转动范围为
φ=254.6°-201.2°=53.4°
式中φ—单个夹持手柄的旋转角度。
2.2 装置的整体动态仿真
对装置的主要零部件分析之后,着重对装置的整体运动进行运动仿真分析。本文从两个方面对装置的整体进行运动仿真分析,一是水平方向上的动态仿真;二是在铅直方向上的运动仿真。
2.2.1 装置的水平方向上的动态仿真
水平方向上,对卧式杠杆木薯拔起装置进行微调及左右摆动把手,能够摇动木薯杆根部,使得木薯秆根部松动,有利于提高卧式杠杆木薯拔起装置的整体适用性及满足实际的生产要求;水平方向上的旋转运动主要是由于轴承座圈的作用,通过人对把手施加力矩,从而使得卧式杠杆木薯拔起装置能够在水平方向上进行调整及实现木薯秆根部松动。在水平方向上,考虑到卧式杠杆木薯拔起装置的干涉及人对把手的摆动范围,经过UG的运动仿真后,得出的卧式杠杆木薯拔起装置在水平方向上的旋转范围,如图4所示。

图4 卧式杠杆木薯拔起装置在水平方向上的旋转范围图Fig.4 The rotation range graph of the horizontal lever cassava pull up device in the horizontal direction
图4中,由于只模拟了1/2的旋转范围,则由图4可以得到卧式杠杆木薯拔起装置在水平方向上的旋转范围为
θ=2×(30°-0°)=60°
其中,θ为卧式杠杆木薯拔起装置在水平方向上的旋转范围。
2.2.2 装置的铅直方向上的动态仿真
在铅直方向上的运动是装置的主运动,起到装置的调整与拔起作用,因此设计时要充分考虑到夹持手柄在铅直方向上的旋转范围及整体装置的强度问题。在多自由度木薯拔起机构中,通过往下压把手,以转动轴的轴心为支点,作用在把手上的力为动力,夹持手柄上的力为阻力,形成一个杠杆机构,从而实现木薯的拔起工作。在充分利用杠杆原理的同时,还应尽量使得装置整体结构紧凑,设计合理,符合实际的生产要求。利用UG对卧式杠杆木薯拔起装置在铅直方向上的运动仿真的旋转范围,如图5所示。

图5 卧式杠杆木薯拔起装置在铅直方向上的旋转范围图Fig.5 The rotation range graph of the horizontal lever cassava pull up device in the vertical direction
图5中,标出的两个极点的角度范围即是卧式杠杆木薯拔起装置在铅直方向上的运动仿真的旋转范围,其值为
φ=196.7°-132.8°=63.9°
其中,φ为卧式杠杆木薯拔起装置在铅直方向上的运动仿真的旋转范围。
3 对卧式杠杆木薯拔起装置的仿真结果分析
在仿真运动的过程中,充分考虑了零件干涉以及实际工况会出现的各种问题,由此得出了的双齿轮驱动夹持木薯拔起机构的旋转角度范围图(见图3),可从中得出双齿轮驱动夹持木薯拔起机构的旋转角度范围为0°~53.4°。此处的最大值为夹持手柄为极限位置,但在实际的工作中极少情况会用到那么大的夹持角度。若以最大角度,由于运动的连续性,此时需要旋转转动手轮的圈数为

那么,此时转动手轮的转动圈数在0~4.15圈之间。在实际的测试中,由于需要的双齿轮驱动夹持木薯拔起机构的旋转角度范围很小(20°左右),那么此时的旋转圈数为

式中r,—实际需要的转动圈数;
φ,—实际测量中单个夹持手柄的旋转范角度。
4 对卧式杠杆木薯拔起装置的实验及分析
经过对木薯生活环境及生长规律进行研究,不断优化产品的机构,确定各零件的具体数值及装配工艺,进行实验和采收效率测试,以保证卧式杠杆木薯拔起装置的采收效率明显高于人工采收且能够最大限度减轻劳动强度。对卧式杠杆木薯拔起装置进行实地测试,可得到该装置采收的速度为10~15s/棵木薯,采收木薯的速度比纯手工采收快将近两倍,且卧式杠杆木薯拔起装置的自锁性能好、夹持力度大,对木薯的夹持及拔起有很好的适应性。其实物图如图6、图7所示。

图6 卧式杠杆木薯拔起装置整体实物图Fig.6 The graph of the horizontal lever cassava device to pull up with the overall physical diagram

图7 卧式杠杆木薯拔起装置部分实物图Fig.7 The graph of the horizontal lever cassava device to pull up with the portion physical diagram
5 结论
经过仿真及对装置的实地测试可知:卧式杠杆木薯拔起装置具有良好的工作可靠性和适应性,其实际工作效率10~15s/棵木薯,是纯手工采收的将近两倍。同时,卧式杠杆木薯拔起装置的自锁性能好,夹持力度大,对木薯的夹持及拔起有很好的适应性,具有明显优于传统手工的优势,可满足社会生产需要,极具发展前景。
[1] 郑贤,陈科余,杨 望,等.木薯收获机块根拔起机构自适应控制算法研究[J].农机化研究,2017,39(4):12-20.
[2] 黄 晖,张 园,李 明,等.降低木薯收获机碎署率的机械结构改进[J].农机化研究,2013,35(8):119-124.
[3] 余瑞明,廖宇兰,刘世豪,等.木薯收获机夹持输送机构设计与力学分析 [J].农机化研究,2015,37(8):74-80 .
[4] 杨怡,廖宇兰,郑侃,等.木薯田间机械化作业研究现状分析[J].广东农业科学,2015,42(8):137-140.
[5] 方 佳,濮文辉,张慧坚.国内外木薯产业发展近况[J].中国农学通报,2010,26(16):353-361.
[6] 蒋瑞,黄晖,崔振德.国内外木薯机械化种植技术的研究现状和发展动态[J].中国热带农业,2012(3):58-60.
[7] 刘洁. 蜗轮蜗杆传动优化设计研究[J].机械传动,2008, 32(2):53-54.
[8] 周少秋,王彦军. 基于Pro/E的蜗轮蜗杆参数化设计[J].宁德师范学院学报:自然科学版,2015,27(2):180-184.
[9] 姜海军. 基于UG的直齿圆锥齿轮三维建模研究[J]. 煤矿机械,2005,26(7):74-76.
[10] 黄跃娟,矫健,肖明喆.基于UG的复合轮系齿轮传动三维建模及运动仿真分析[J].林业机械与木工设备,2015,43(2):41-44.
Based on the UG for the Horizontal Lever Cassava Pull up Device Design and Movement Simulation
Wang Yong, Ye Ziwang, Lu Di, Dong Zhen, Ma Yanjie
(College of Mechanical Engineering , Guangxi University , Nanning 530004 , China )
Currently, cassava pull up the bulk of the work is still using the manual method, although there is a large cassava harvesting device, but these large equipment is not suitable for the foothills of the Guangdong , Guangxi , Guizhou and other regions, and large equipment investment cost is high, the product promotion in rural areas there are a lot of resistance. In order to solve the farmers harvest cassava manual harvesting in the process of slow speed, easy to hurting hands, etc., this paper puts forward a horizontal lever cassava pull up device of machinery, and before applying for the national invention patent, this paper will use UG to the mechanical design and simulation movement, realizes the mechanization of cassava pull up clamping and pull up and reduce the labor intensity of cassava pull up, at the same time also can improve the efficiency of cassava harvest, improve the economic benefits of cassava crop production and the production level, meet the growth needs of cassava.
cassava pull up device; motion simulation; UG
2016-12-05
地区科学基金项目(51465005)
王 勇(1972-),男,湖南安化人,讲师,硕士,(E-mail)wangy72@gxu.edu.cn。
董 振(1981-),男,安徽宿州人,工程师,(E-mail)cybhdz508@163.com。
S225.7+1
A
1003-188X(2018)02-0014-05
