快件分拣机器人导航定位系统的研究
2018-06-04周建浩董小雷赵丽宏
周建浩,董小雷,赵丽宏
(1.华北理工大学 机械工程学院,河北 唐山 063000;2.唐山市产品质量监督检验所,河北 唐山 063000)
0 引言
近年来,随着我国经济的增长和电子商务行业的快速发展,快递行业对快件包裹的自动分拣有强烈的市场需求。传统交叉带分拣系统存在占地面积大、成本高等问题,中小分拣中心难以承受,且传统物流中心作业模式下人工工作量大、分拣效率低、出错率高,不能满足如今丰富的电子商务物流种类要求。所以迫切需要对商务物流中心分拣系统进行智能化、自动化的设计,以提升物流中心的分拣能力[1],降低工人劳动强度,提高工作效率,实现快件分拣的自动化。针对此,本文从实际应用出发,通过工业相机对二维码地标的扫描,采用惯性导航技术为主、视觉导航为辅的多种传感融合定位方式,对快件自动分拣机器人小车视觉导航定位进行研究。
1 惯性导航定位技术
1.1 平台式惯性导航系统
平台式惯性导航是将加速度计、陀螺仪等测量元件通过万向支架安装在惯性平台上,然后将惯性平台稳定在预定坐标系内,为测量元件提供一个测量基准,使其不受载体角运动的影响[2]。根据加速计的输出导航计算机开始导航解算,进而得出载体的速度、位置等导航参数。平台式惯性导航系统具有计算简单、直接模拟导航坐标系、能够隔离载体角运动、精度高等优点,但也有结构复杂、体积较大、制作成本高等缺点。平台式惯性导航系统原理框图如图1所示。
1.2 捷联式惯性导航系统
捷联式惯性导航是直接将速度计和陀螺仪安装在载体上,在计算机中实时计算载体与导航坐标系之间的关系,并实时计算姿态矩阵求得载体实时速度、位置等参数[3]。捷联式惯性导航具有功能强、可靠性高、精度高、便于安装维护等优点,被广泛应用于精确导航定位领域。加速度计和陀螺仪是惯性导航系统中的两个重要器件,加速度计主要由敏感质电位弹簧、阻尼器等组成,用于检测平移运动的加速度,指向当地的垂线方向;陀螺仪是一种机械惯性导航传感器,可以测得载体的加速度和旋转角度,具有很高的定位导航精度[4]。捷联式惯性导航系统原理框图如图2所示。

图1 平台式惯性导航系统原理框图
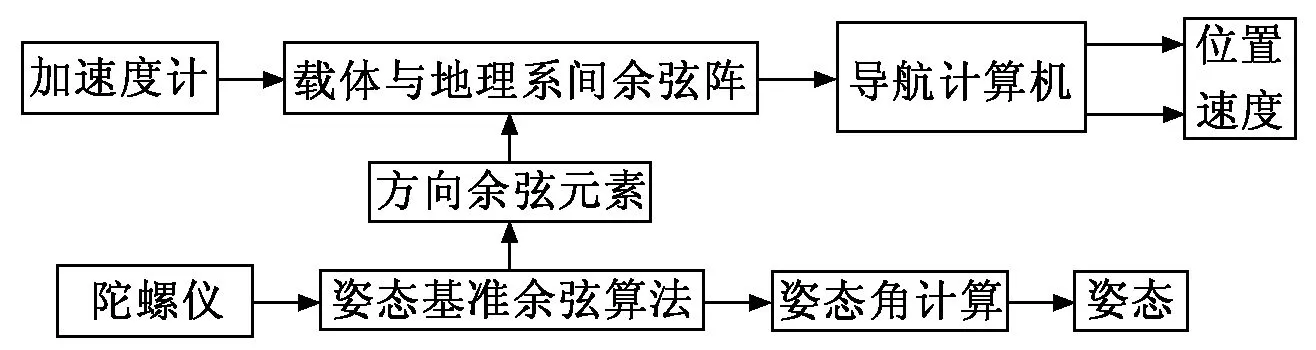
图2 捷联式惯性导航系统原理框图
2 视觉导航定位技术
视觉导航主要是通过工业相机对路标图像进行信息的获取、传输、处理与解析,从而使分拣机器人能够感知自己的位姿信息。视觉导航定位系统由硬件模块和软件模块两部分组成,硬件模块由工业相机、地标图像及电源等组成;软件模块由上位机和图像解析软件组成[5]。
2.1 硬件模块
硬件模块中的智能工业相机是一种可以把图像信息转换成数字信号的工业视觉传感器件。本文所选取的工业相机型号为迪美捷500万像素黑白高速工业相机(如图3所示),相机内置图像处理功能,自带64 MB缓存,能够在高速视频流下显著节省CPU资源使图像传输更稳定,能够通过Link与控制系统快速链接,将图像信息以数字信号的方式传入工控机。
本智能工业相机具有光学字符识别、读取二维码地标、精准校验和程序控制等功能,其具体参数如表1所示。
二维码图像是一种黑白相间、用特定几何图形按一定规律在平面上分布的图形,用于储存分拣小车位置信息的数字数据,使分拣小车根据扫描二维码图像获取的存储信息检测自身所处的位姿,对行走左右偏向的距离做出调整,从而确保小车运行的精度。二维码图标详解如图4所示。

图3 工业相机
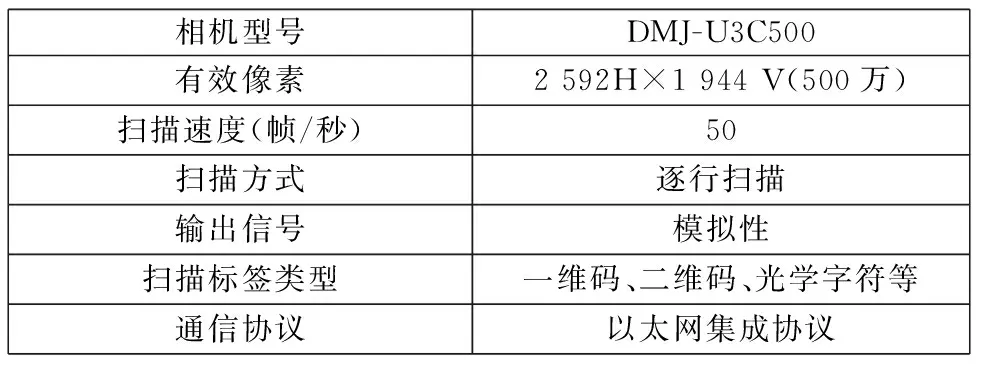
相机型号DMJ-U3C500有效像素2 592H×1 944 V(500万)扫描速度(帧/秒)50 扫描方式逐行扫描输出信号模拟性扫描标签类型一维码、二维码、光学字符等通信协议以太网集成协议
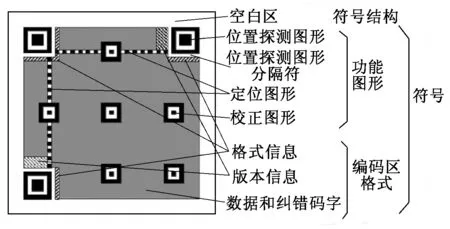
图4 二维码图标详解
2.2 软件模块
软件模块主要由图像解析软件和上位机软件组成,由智能工业相机扫描二维码图像并传入上位机,通过上位机读取界面对二维码进行解析。
图5为二维码图像解析界面,当定位圈由黄色变为绿色时,表示二维码图片解析成功,通过图片信息解读出当前二维码所在位置及小车位姿情况。其中左上角解析出的位置信息表示在世界坐标系下二维码的坐标及相对于Y轴的偏角,然后通过Link快速传入控制系统,通过扫描到的位置信息由控制系统对小车当前的运动状态进行纠正,确保小车的运行精度[6]。
2.3 视觉定位系统工作原理
通过摄像机对获取二维码图像信息的处理,经过特殊的算法解析获取分拣机器人小车的当前位置。视觉定位系统工作流程如图6所示。
3 结语
本文的自动分拣机器人采用惯性导航为主、视觉导航为辅的导航定位模式,即利用惯性导航作为导引技术,用视觉导航来纠正小车因为惯性导航长时间行走累计的误差,对惯性导航系统参数进行重整。经实验证明:采用惯性导航与视觉导航多传感融合定位导航的方式,使得分拣机器人小车运行更加稳定,能够有效地保证分拣小车的定位精度。

图5 二维码图像解析界面

图6 视觉定位系统工作流程
参考文献:
[1] 胡正伟.清扫机器人定位及路径规划研究[D].秦皇岛:燕山大学, 2010:44-47.
[2] 张汉斌.用于电商配送中心的物流仓储搬运机器人(AGV)的研究[D].北京: 北京物资学院,2014:23-26.
[3] 赵现强.平台式陆用惯性导航系统中控制回路的设计及实现[D].哈尔滨:哈尔滨工程大学,2012:33-35.
[4] 王华.基于隐形二维码的AGV自动导引系统研究[D].昆明:云南财经大学,2016:29-32.
[5] 计怡峰.全向移动机器人惯性导航系统设计[D].南京:东南大学,2016:41-44.
[6] 陈无畏,李碧春,孙海涛,等.基于视觉导航的AGV模糊—最优控制研究[J].中国机械工程,2006,17(24):2546-2550.
