基于图像识别的深海探测目标跟踪系统开发
2018-06-04李晓伟葛锡云冯雪磊陈南若
李晓伟,葛锡云,冯雪磊,陈南若
(中国船舶科学研究中心 深海载人装备国家重点实验室,江苏 无锡 214082)
0 引言
光学成像探测是目前载人潜器和水下机器人对目标物进行近距离观察和辅助作业的主要途径。由于高速摄像技术发展迅速,更高分辨率、更高速度摄像机的出现对相机成像质量的要求也在提高[1]。由于水下相机的控制人员往往担负着潜器的其他操控任务,不能第一时间对潜器相对于目标运动情况做出反应且对运动目标无预见性,通过手动控制云台来捕捉目标会造成拍摄图像的抖动和失焦等现象,不利于任务效率的提高。
目标跟踪在军事侦察、安防监控和智能交通等很多领域得到了广泛应用[2-3],但是在深海探测中很少有应用,有必要开发一种能够长时间自动跟踪目标,并且根据目标与摄像机的位置变化能够自动进行补偿,最终实现对目标进行对准的跟踪系统。
1 时空上下文STC跟踪器设计
深海探测作业实现水下光学探测跟踪的核心是目标的跟踪算法。根据背景是否参与计算跟踪算法可分为生成式跟踪算法和判别式跟踪算法[4-6]。目前广泛采用的机器视觉跟踪算法有如MIL、IMIL、IVT、FCT、VTD、TLD 及 Box-PF、IA-MCMC、ANNF-SSAMC算法等[7],但离真正实时跟踪的要求还有差距。Zhang[8]等人提出了相比前者更加高效的基于上下文的STC跟踪算法,其快速性超过了大部分主流算法。
1.1 STC跟踪算法
STC跟踪算法中当前帧的置信图函数c(x)表示为:
c(x)=∑v(z)εXCP(x|v(z),o)P(v(z)|o).
(1)
其中:x为目标相对于图像位置;o为目标对象;z为需要进行处理运算的像素点位置;v(z)为当前帧中z处的上下文特征;XC={v(z)=[I(z),z]|z∈ΩC(x*)}为上下文特征集合,I(z)为图像中z处的灰度值,x*为目标中心位置,ΩC(x*)为目标中心的周围区域;P(x|v(z),o)为条件概率,代表了上下文信息的空间关系,由式(2)表示;P(v(z)|o)为上下文先验概率,表示局部区域内部每个点为目标的概率,由式(3)表示:
P(x|v(z),o)=hSC(x-z).
(2)
P(v(z)|o)=I(z)ωσ(z-x*).
(3)
其中:hSC(x-z)为目标位置x与z之间距离和方向的函数,表示了x与z之间的空间上下文关系。式(3)中权重函数:
其中:a为归一化参数,保证概率取值范围为[0,1];σ为尺度参数。z与x*的距离越大权重值也就越大。置信图函数又可表示为式(4):
(4)
其中:b为规则化常数;α为尺度参数;β为形状参数,为了得到更好的鲁棒性,取β=1。由公式(4)可以得到卷积关系式(5):

(5)
对式(5)进行快速傅里叶变换可以得到频域关系式(6):

(6)
式(6)再通过傅里叶逆变换可以得到空间上下文的计算公式hSC(x),即:
(7)
(8)


(9)
至此新的一帧的目标位置即可算出,目标位置得到更新。STC目标跟踪算法的基本原理如图1所示。

图1 STC目标跟踪算法原理图
1.2 软件跟踪功能的实现及效果检测

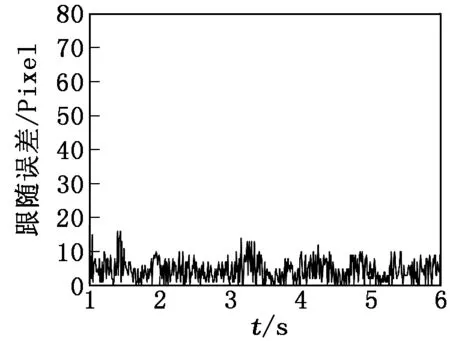
图2 跟随误差结果
由图2可以看出跟踪误差能够维持在一个较小的取值范围内,满足对水下低速转动云台的控制需求。
2 云台速度控制功能设计
云台电机控制采用速度控制方式,原理为根据靶框中心与目标框中心的相对位置来确定电机的运行速度,通过不断更新速度指令来实现目标跟踪。为了减小画面抖动,本文云台控制采用了目标位移和速度信息相结合的控制方式,实现原理如图3所示。

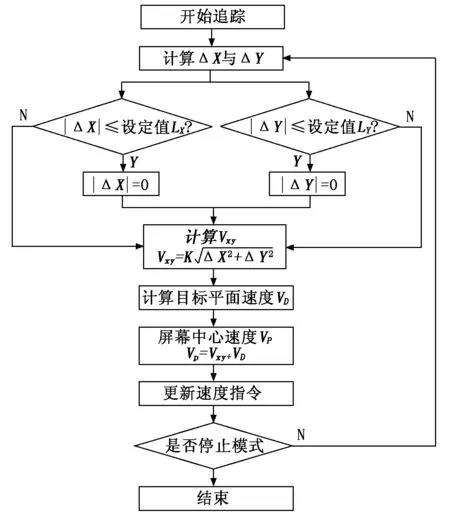
图3 电机控制指令生成原理
3 实验测试
本文中硬件测试平台采用双自由度变速云台观察组件,组件包括双自由度云台、水下高清摄像机以及补充照明设备。双自由度变速云台与上位机的通讯方式为RS485,硬件测试平台的实物图如图4所示。

图4 硬件测试平台实物图
实验中速度与跟随误差的关系可以转化为时间与跟随误差的关系,在单方向上可以得出时间与跟随误差的关系式为:
其中:k为比例因子;L为靶框中心与屏幕中心的偏移距离。k值越大时达到稳定的时间越短,但过高的k值会造成云台旋转过快,降低图像目标识别效果,在此取0.8。为了验证本文中目标跟踪系统对目标物的跟踪是否有效和便于对实验结果进行分析,取以半径为2 m的定速圆周运动的物体为目标物,周期为120 s,中心放置观察组件,在目标移动到距屏幕中心位置一定距离时启用跟踪功能,按照指定周期记录下屏幕中心与靶框中心之间的跟随误差,根据跟随误差绝对值与时间的关系确定跟踪功能是否满足需求。测试结果如图5所示,跟踪功能开启以后,跟随误差开始快速缩小,并且随着绝对值减小相对速度逐渐降低,当经过2 s以后跟随误差的值基本达到稳定状态,跟随误差的值稳定在20像素点以内,靶框中心基本能够稳定在距离屏幕中心一定范围内。经过实验检测,本文开发的目标跟踪系统基本能够满足最初设计需求。
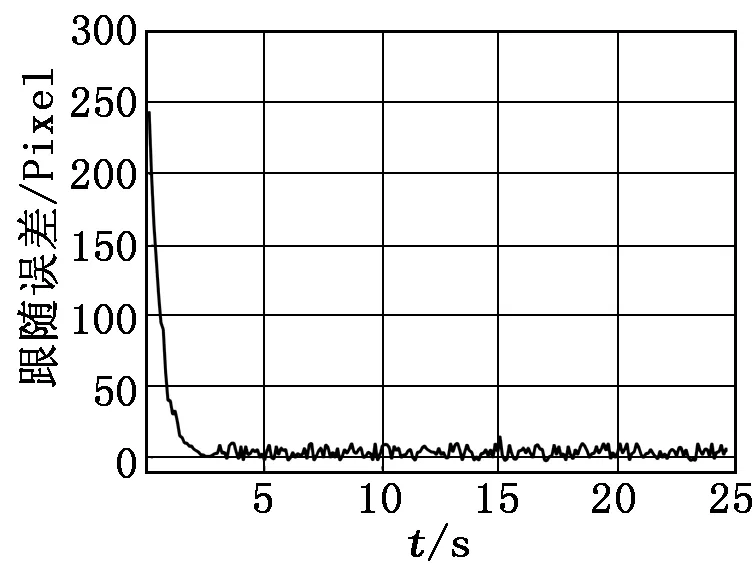
图5 跟踪过程中水平方向跟随误差与时间关系
4 结论
本文在对目前深海探测中光学观察手段分析后指出存在的问题,并提出了改进目标。介绍了现有的图像识别处理算法的发展状况,选取了适合处理高清水下图像的STC算法,在完成了跟踪器功能开发的基础上进行了电机速度控制功能开发,实现了水下移动目标的跟踪功能。通过实验可得出跟踪系统在对水下低速目标进行跟踪时能取得较好的效果,具有一定的实用价值,基本满足了初期的功能需求。
参考文献:
[1] 张彦敏,谢仁富,陈兵.水下高速摄像与照明系统[J].舰船科学技术, 2012,6(6):109-112.
[2] Wu Y,Lim J W,Yang M H.Online object tracking:A benchmark[G]//Proceedings of IEEE Computer Society Conference on Computer Vision and Pattern Recognition.Piscataway:IEEE,2013:2411-2418.
[3] Yilmac A,Javed O,Shah M.Object tracking:A survey[J].ACM Computing Surveys,2006,38(4):13.
[4] 刘威,赵文杰,李成.时空上下文学习长时目标跟踪[J].光学学报, 2016,36(1):109-112.
[5] 张红颖,郑轩.基于双目标模型的时空上下文跟踪算法[J].光学精密工程,2016,24(5):1215-1223.
[6] Grabner H,Leistner C,Bischof H.Semi-supervised on-line boosting for robust tracking[G]//Proceedings of 10th European Conference on Computer Vision(ECCV).Marseille:[s.n.],2008:234-247.
[7] 徐建强,陆耀.一种基于加权时空上下文的鲁棒视觉跟踪算法[J].自动化学报,2015,41(11):1901-1902.
[8] Zhang K H,Zhang L,Liu Q S,et al.Fast visual tracking via dense spatio-temporal context learning[G]//Proceedings of the 2014 European Conference on Computer Vision (ECCV). Czech Republic: Springer,2014:127-141.
[9] 杨彪,林国余,张为公,等.融合残差Unscented粒子滤波和区别性稀疏表示的鲁棒目标跟踪[J].中国图象图形学报,2014,19(5):730-738.
