皮带撕裂的视觉检测*
2018-06-04尚学文王福平王福斌
程 月,尚学文,王福平,王福斌
(1.唐山劳动技师学院 电气工程系,河北 唐山 063300;2.唐山昆达科技有限公司,河北 唐山 063020;3.大庆油田钻探集团 钻井三公司,黑龙江 大庆 163412;4.华北理工大学 电气工程学院,河北 唐山 063009)
0 引言
皮带输送设备在冶金、煤炭、矿山、水泥等行业的物料运输中起着重要的作用,随着企业生产规模的扩大,大量的物料需借助于皮带输送自动完成。在皮带的高速物料输送过程中,若不能及时发现皮带撕裂事故,将会造成皮带的大面积撕裂及物料的散落,甚至造成整条皮带的报废,给企业带来巨大的经济损失。
针对皮带撕裂监控难题,国内外许多研究机构都在探索解决方案。王瑞义等[1]早在1992年就对国外20世纪80年代输送皮带撕裂检测进行了总结:皮带撕裂检测从接触式向非接触式发展,并将超声波扫描技术应用于皮带撕裂的检测。Ceracki P等[2]提出的热轧带钢表面检测方法,对皮带表面划痕检测具有借鉴意义。张远等[3]采用干簧管检测皮带撕裂,但结构较为复杂。燕山大学的张春明[4]提出了基于线激光辅助的皮带撕裂视觉检测及保护方法,通过对检测图像中激光条纹中心的提取和分析来判断皮带表面是否存在撕裂,撕裂检测虽然取得了较好的效果,但激光条纹对皮带划痕的检测效果不很理想。
为实现皮带裂纹检测的自动化、智能化,本文设计并实现了基于智能相机的皮带撕裂检测系统,可对冶金、矿山、水泥、陶瓷等诸多行业的皮带输送进行安全监测。
1 皮带撕裂视觉监控系统原理
图1为皮带撕裂监控系统原理框图,由工业智能相机、LED照明光源、光源控制器、继电器控制模块及上位机等组成。
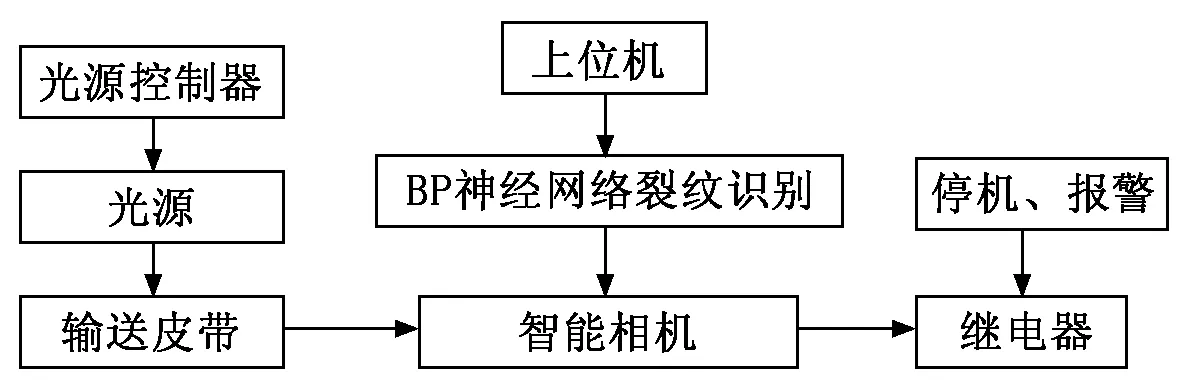
图1 皮带撕裂监控系统原理框图
为获得高质量的皮带工作面图像,应使用专用照明光源对皮带工作面进行照明[5],使得相机视场范围内光线均匀。智能相机采集到皮带图像后,经图像处理、特征提取及BP网络判断,对皮带的表面状况进行识别。当发现有疑似裂纹时及时发出警报,提醒工作人员做进一步确认处理;当发现有皮带撕裂现象时,报警的同时应切断皮带输送机工作电源,避免事故的进一步扩大。
皮带监控装置的输出信号通过转换电路将TTL电平转换为继电器输出信号,分别驱动报警、停机等不同功能部件,实现皮带输送监控功能。皮带监控装置的主要功能部件有:
(1) 智能工业相机。视觉监控相机选用德国Vision Components公司的VC4038工业智能相机。该相机将图像采集、处理、I/O控制及通信功能集于一体,处理速度达400 MHz,相机分辨率为(640×480)像素,帧率为63帧/秒。通过数据I/O可与PLC等外部设备直连,便于控制功能的实现。
(2) 光源及光源控制器。光源选用VL600D-W型号LED长条形光源2个,每个光源长度为316 mm,可覆盖相机视场范围,提高图像采集质量。光源控制器选用VP-24型,为双通道控制器独立控制,对光源亮度可进行精确的调节。为了扩大照明范围,两个条形光源以10°的倾斜角向外布置,可保证在相机视场范围内得到有效的照明。
皮带监控装置的安装及其光源布置[6-7]如图2所示。

图2 皮带监控装置的安装及其光源布置
皮带监控系统的关键是皮带裂纹图像的分割及识别,皮带裂纹图像的处理及识别过程如图3所示。由于皮带输送机在运行过程中存在一定的振动现象,且工作介质存在粉尘干扰,导致相机采集到的图像呈现一定程度的模糊退化,所以在进行图像分割及特征提取前要进行图像复原处理。
2 改进的Canny皮带裂纹边缘检测
图像局部灰度变化最显著的部分构成了图像的边缘。在皮带撕裂监控系统中,边缘是皮带裂纹图像最主要的特征之一,为了快速、可靠地识别皮带裂纹,采用Canny边缘检测方法[8],并对检测到的边缘进行四周扩展改进,在检测到的边缘基础上,增加一个裂纹权重值,使得边缘向外扩张,以便获得更加鲁棒的边缘检测效果。
Canny边缘检测算子采用原始图像f(x,y)与平滑滤波脉冲响应的一阶微分h(x,y)进行卷积运算,得到平滑后的图像g(x,y)=f(x,y)⊗h(x,y),然后再对此图像进行梯度计算[9]:

(1)
根据卷积运算得:
(2)
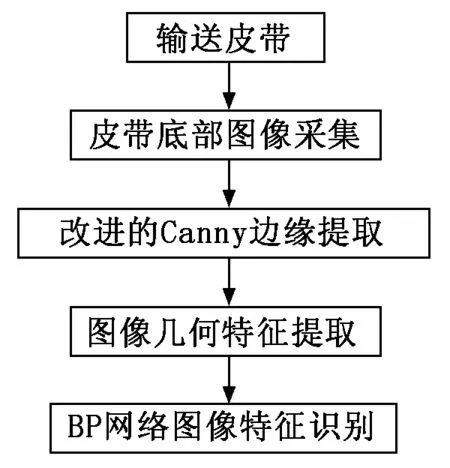
图3 皮带裂纹图像的处理及识别过程
为解决图像由于平滑后变得模糊而导致边缘变宽问题,首先用非极大点抑制方法限制梯度幅值[10],再用双阈值算法剔除假边缘,并把断续的边缘连接成轮廓,得到目标的轮廓边缘后,在边缘基础上增加一个δ值,使得整个被提取的边界向外扩张,在视场范围内将目标进行人为放大,以增强检测的可靠性。
图4为采用改进的Canny边缘检测算子检测皮带撕裂的结果。图4(a)中,连续4帧图像的不规则外边缘为(640×480)像素视场范围内的皮带检测轮廓提取结果,方框内为监控程序设定的感兴趣区域(ROI);图4(b)中,连续4帧图像的虚线框为在ROI区域内识别出的皮带裂纹的最小外接矩形;图4(c)为裂纹贯穿整帧图像时对裂纹的识别结果。
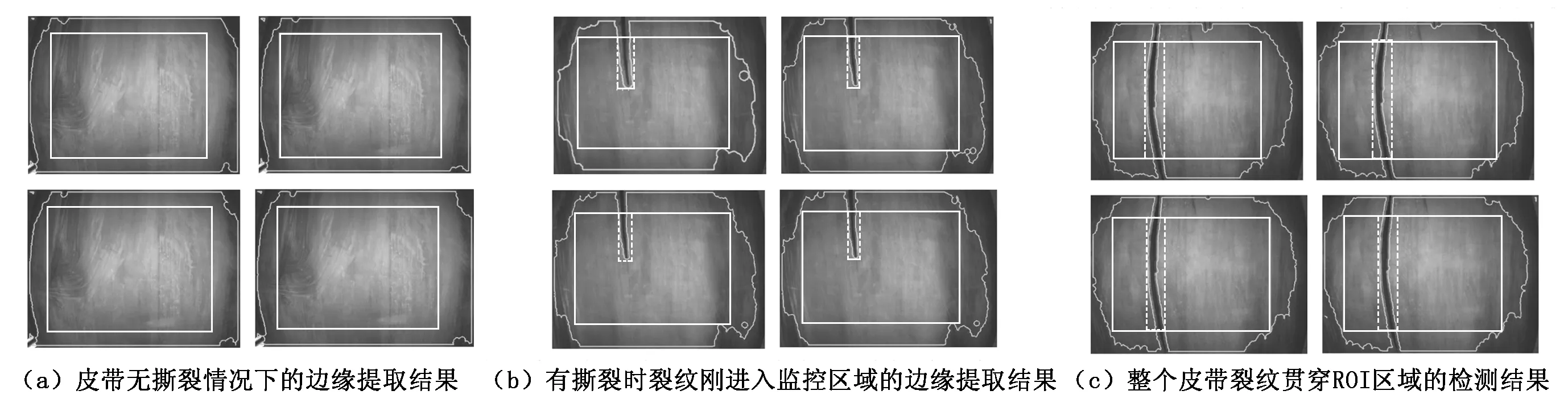
图4 皮带裂纹边缘提取结果
3 皮带裂纹的改进BP网络识别
神经网络所具有的并行信息处理、自学习及联想记忆能力使得神经网络很适合于模式的分类应用,三层BP网络结构如图5所示,隐层使用S形传输函数f1,输出层使用线性传输函数f2。
图5中,网络的输入层到隐层的连接权值矩阵和阈值矩阵分别为W1、θ1,隐层到输出层的连接权值矩阵和阈值矩阵分别为V2、b2,Pk为对应于网络输入层神经单元的R维特征输入向量,yk为对应于输出层神经单元的输出向量,a1为隐层输出向量[11]。
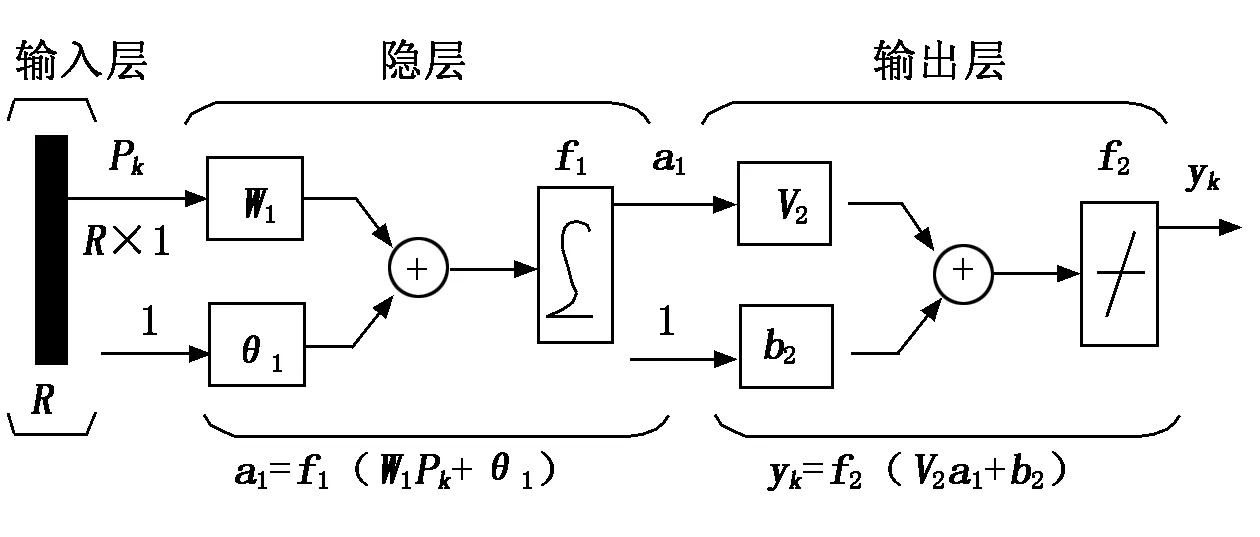
图5 三层BP神经网络结构
为提高BP网络的收敛速度并避免网络陷入局部极小,对标准的BP算法进行了算法修改,在更新网络的权值及阈值过程中引入了附加动量项[12]。
在对皮带运行过程进行监控时,对皮带图像特征进行提取及计算,并将特征值作为BP神经网络的特征输入量,实时预报皮带状态的监控结果。当皮带有撕裂现象发生时,根据决策规则及时输出相应的控制信号,对皮带输送机进行报警或停机等控制。
将皮带裂纹图像的面积作为输入量,并归一化处理,以对BP网络进行训练及测试。将训练收敛的网络作为识别、分类器,依据实时采集的皮带图像的裂纹面积几何特征对裂纹目标进行识别。
提取的皮带裂纹图像面积几何量的归一化表达式为:
(3)
其中:s0为ROI区域内无裂纹出现时的图像像素面积;s1为提取的裂纹图像像素面积。
当面积s大于或等于ε(ε为设定域值),且连续3帧图像中有2次出现面积大于ε的情况时,认为发生撕裂现象,BP网络的预报输出有效,并启动报警或停机控制命令。
在ROI有效区域面积内随机提取的8帧裂纹目标图像如图6所示。当皮带出现裂纹并进入ROI监控区域后,系统对采集到的每帧裂纹图像进行边缘提取,并对裂纹边缘内部像素进行计数,形成裂纹像素面积几何特征量。
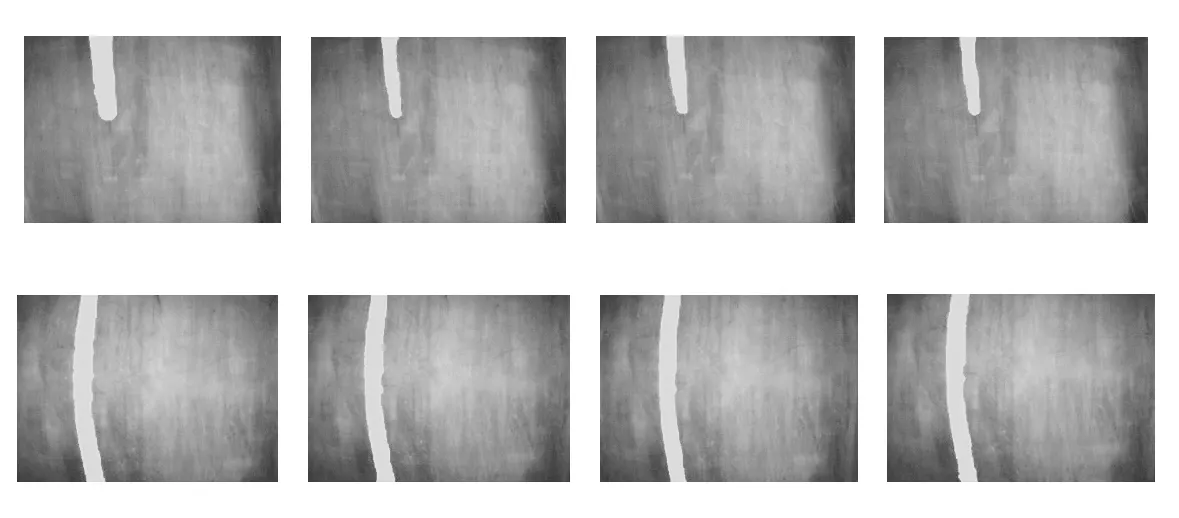
图6 ROI区域内的裂纹目标图像
为了进一步提高皮带裂纹识别的可靠性,将裂纹图像的长宽比参数作为辅助判断条件,每帧图像裂纹的长宽比与贯穿裂纹的最大长宽比相除作为归一化值。以第100帧图像为例,裂纹图像长宽比几何特征提取如图7所示。

图7 第100帧皮带图像的长宽比特征提取结果
表1为BP网络部分样本训练结果,样本分别选取无裂纹、部分裂纹及贯通裂纹三种情况,其中,第53帧~55帧图像为无裂纹图像,第99帧~101帧图像为刚刚产生裂纹图像,第139帧~141帧图像为裂纹贯穿ROI区域图像。通过对每帧图像进行面积及长宽比特征参数提取,构成BP网络的训练样本。考虑到在图像分割过程中若出现斑点干扰情况,可能会将斑点误分割为裂纹,此时斑点图像像素面积s接近于0,而长宽比却可能较大。因此,在构建训练样本时,为提高网络的可靠性、适应性,对无裂纹时图像样本的长宽比特征量取0~1之间的随机数[13]。

表1 部分皮带图像几何特征量样本训练结果
将训练样本数据作为BP网络输入特征量对网络进行训练,达到设定的误差阈值时网络收敛。构建的BP网络均方误差收敛曲线如图8所示。由图8可见,网络可以较快地收敛到期望的误差。
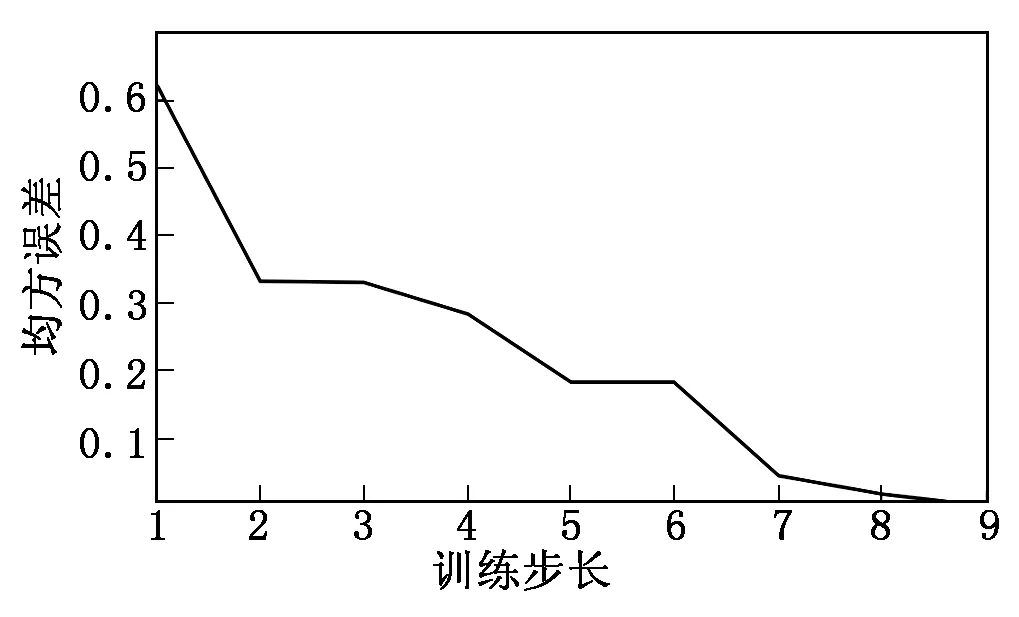
图8 BP网络均方误差收敛曲线
为验证训练后的网络识别能力,选取第55帧、102帧 、142帧图像作为测试样本,对网络的裂纹识别能力进行测试,测试输出结果如表2所示。从测试结果看出:对于不同类型的裂纹图像样本,网络均输出正确的识别结果,表明训练后的改进BP网络具备皮带裂纹识别能力。

表2 网络识别能力测试结果
4 结语
本文提出的皮带撕裂监控系统在首钢某矿山的皮带输送机上安装,经现场实际使用表明:皮带撕裂检测系统对皮带划痕、皮带裂纹等故障识别准确。
为进一步提高本文的皮带裂纹视觉识别能力,下一步将对系统在粉尘干扰环境下的工作可靠性进行研究。
参考文献:
[1] 王瑞义,韩菊娣.胶带纵向撕裂保护装置[J].工矿自动化,1992(3):42-45.
[2] Ceracki P,Reizig H J,Rudolphi U,et al.On-line inspection of hot rolled strip[J].MPT Int,2010,23(4): 66-68.
[3] 张远,高建民,王龙,等.采用干簧管检测的皮带撕裂监测装置:中图,CN204453669U[P].2015-02-12.
[4] 张春明.基于线激光辅助的皮带撕裂视觉检测技术研究[D].秦皇岛:燕山大学,2012:36-53.
[5] 张利平,张红英,吴斌.改进的基于空间特征的划痕检测[J].计算机工程,2010,36(22):190-191.
[6] Li Wei,Wang Zewen,Zhu Zhencai,et al.Design of online monitoring and fault diagnosis system for belt conveyors based on wavelet packet decomposition and support vector machine[J].Advances in Mechanical Engineering,2013(5):1-10.
[7] Li Ming,Du Bianjing,Zhu Meiqiang,et al.Intelligent detection system for mine belt tearing based on machine vision[C]//2011 Chinese Control and Decision Conference (CCDC).[s.l.]:[s.n.],2011:1250-1253.
[8] Shrivakshan G T,Chandraseka C.A comparison of various edge detection techniques used in image processing[J].International Journal of Computer Science Issues,2012,9(1):269-276.
[9] Chen Yong,Xu Min,Liu Huan-lin,et al.An improved image mosaic based on Canny edge and an 18-dimensional descriptor[J].Optik,2014,125:4745-4750.
[10] Deng Caixia,Wang Guibin,Yang Xinrui.Image edge detection algorithm based on improved canny operator[C]//Proceedings of the 2013 Interational Conference on Wavelet Analysis and Pattern Recognition,Tianjin:[s.n.],2013:168-172.
[11] 牛世峰,黎莉.神经网络与贝叶斯滤波器在换道预测中的应用[J].科学技术与工程,2016(14):212-216.
[12] 张龙,顾强康,张仁义,等.基于BP神经网络的盐胀量的预测方法[J].科学技术与工程,2015(10):215-219.
[13] Jian leikong,Li Fan,Jin Haoliu,et al.New calibration method of two-dimensional laser scanner and camera based on LM-BP neural network[J].International Journal of Signal Processing,Image Processing and Pattern Recognition,2016,9(7):231-234.
