基于激光雷达的地铁隧道侵限检测方法
2018-06-04刘璐宾宗光华
刘璐宾,王 巍,宗光华
(北京航空航天大学 机械工程及自动化学院,北京 100191)
0 引言
近年来我国轨道交通行业的发展十分迅猛,地铁隧道的数量和长度急剧增加,随之而来的是工作量巨大的地铁隧道维护与质量管理工作,包括隧道裂缝检测[1-3]、隧道变形检测[4-6]和隧道侵限检测等。其中,在隧道侵限检测方面已经取得了一些研究成果。孙睿等人提出了一种应用光纤光栅的检测方法,通过在墙体和防护网安装传感器的手段来建立限界物理模型[7]。韩志文将立体视觉与激光扫描技术相结合,完成了隧道内的侵限检测[8]。魏巍在立体视觉的检测手段中应用了匹配算法,进一步提高了隧道检测的精度[9]。激光扫描和视觉均被应用到隧道侵限检测任务中,但由于激光扫描的精度较高[10],故它在隧道侵限检测中具有不可替代的地位。以往的激光扫描方案,大都先基于横截面的形状建模,然后实现侵限检测任务。这种方案的误差偏大,实时性也难以保证。本文提出了一种基于铁轨建模的检测技术,为地铁隧道的巡检工作提供了一种在线检测且实时可靠的实施方案。
1 点云获取
从激光雷达获取的数据是以其自身坐标系为参照的点云数据。随着车体的运动,激光雷达坐标系不断移动,不同时刻下点云数据的基准坐标不同。因此,对所有点云数据进行坐标变换才能将其转换到同一坐标系下。如图1所示,在巡检车的初始位置建立全局坐标系XPYPZP、车体坐标系XBYBZB(初始与坐标系XPYPZP相同)和激光雷达的测量坐标系XLYLZL。

(1)

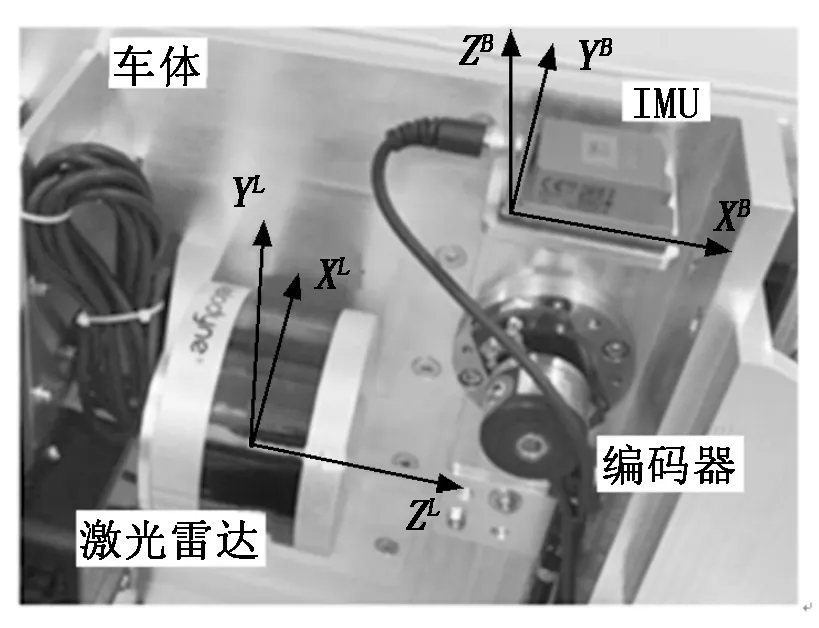
图1 坐标系示意图
2 点云预处理
2.1 法向量估计
点云的法向量指过该点且与点云组成的表面相切的平面的垂直向量。法向量的变化在一定程度上体现了点云表面的变化,这也为之后提取轨道提供了依据。
本文中利用最小二乘法估计点云法向量,假设点云模型的表面是处处光滑的,每个点的邻域都可以通过平面很好地拟合,这样就可以利用拟合平面的法向量代替该点的法向量[11]。对于点云中的点p计算出其近邻点,通过这些点拟合最小二乘平面L,该平面可用式(2)表示:
(2)
其中:n为拟合平面的法向量;d为拟合平面到原点的距离;k为拟合平面内点的总数;qi为原点指向第i个点的向量。
2.2 点云平滑
点云数据存在误差,故需要平滑处理以滤除噪声。本文中采用的是移动最小二乘(MLS)原理,其核心思想是任意点的坐标由其附近点决定,其他区域的点不产生影响。选取不同的基函数、权函数和影响区域会产生不同的拟合结果。目标点x最终的坐标可由目标函数式(3)表示:
(3)
其中:a(x)为待求系数;β(x)为基函数;f(x)为x处的坐标;t为基函数的维数。
对于全局坐标系中的点,以z为所求目标点,则基函数一般有两种:
(1) 一维坐标基:(1,x,y)T。
(2) 二维坐标基:(1,x,y,x2,xy,y2)T。
为了便于计算,这里取β=(1,x,y)T。
目标函数的误差可由式(4)表示:

(4)
其中:m为影响域内点的总数;zj为xj处的测量值;w(xj)为xj处的权值,可由式(5)决定:

(5)
其中:γ为常系数。
为使J取最小值,对a(x)求导:

(6)

2.3 提取轨道
轨道上表面是一个狭长的平面,从点云中直接提取轨道难度较大,因此,在本文中将提取工作分成以下两个步骤:①提取点云中所有的平面;②根据长宽比筛选出轨道。
2.3.1 提取平面
在点云中,平面由离散的点组成。当所有的点都接近于一个平面时,认为这些点近似组成一个平面。

【证明】协方差矩阵∑是实对称阵,则存在正交矩阵Q使式(7)成立:
cov(X)=∑=QTΛQ.
(7)
其中:X为点云的三维坐标矩阵;Λ为对角阵。
令Y=XQT,由矩阵性质可知,X经过数次初等变换可以得到Y,且X和Y内各点的相对位置不变,将Y代入式(7)可得:
cov(Y)=Q∑QT=Λ.
(8)

利用上述方法,计算点云中各点及其邻域点到拟合平面的平均距离。提取出平均距离小于阈值的点集组成的平面,即提取出点云中所有的平面。
2.3.2 计算宽度与长宽比
由先验知识可知,铁轨宽度在70 mm~100 mm之间,其外形的长宽比大于10。故从上述平面集合提取宽度与长宽比符合要求的平面即可视为铁轨平面。
由2.3.1节中证明可知,协方差矩阵∑的最大特征值λmax对应的特征向量nmax为Y中各点方差最大的坐标轴,即铁轨的长度方向l;第二大特征值λsec对应的特征向量nsec为Y中各点方差第二大的坐标轴,即铁轨的宽度方向θ。选取平面中趋于中心的点p,且以点p为中心设置一个半径r=200 mm(约为轨道宽度的2倍)的搜索窗(如图2所示),计算窗内各点在θ方向的分布宽度s。
分别计算搜索窗内的点与点p组成的向量(n1,n2,…)与θ的内积,其值为该点在θ方向的投影坐标,分别求投影坐标中的最大值smax和最小值smin,则s=smax-smin。由于点云误差,计算出的数值往往比理论值稍大,所以这里将铁轨的宽度范围取为70 mm~150 mm。
同样可以利用求平面宽度的方法求平面长度,再计算平面的长宽比。由于铁轨长度相对较大,搜索窗要取到所有的点势必涉及大量的计算,因此建议采用一种启发式的方法,即利用之前计算的λmax和λsec的比值代替长宽比(经验证λmax/λmin>20可满足要求)。
3 实时检测
隧道限界如图3所示。该图显示限界在隧道的横截面内的形状是处处相等的。同样地,限界在轨道的横截面内的形状也处处相等,基于该特点便可以把三维的问题简化成轨道截面内的二维问题。

图2 宽度搜索窗示意图 图3 地铁隧道扫描限界
首先,将扫描点投影到轨道平面内,利用k近邻算法计算各点与轨道的最近距离l1和l2,将之分别视为该点与轨道相切的圆半径,由于l1和l2远小于轨道转弯半径,故该点与两个切点位于同一条直线上,即同一横截面内。
沿着X方向整毫米间隔提取限界的Y坐标,再通过l1和l2的值确定扫描点的X坐标,然后查询对应的限界的Y坐标,即可判断出扫描点是否侵限,于是,相关的二维问题被转化到一维空间。
4 实验结果
系统中使用Velodyne公司VLP-16激光雷达,测量误差小于30 mm。数据处理采用NI公司的高性能工业控制器IC-3173,内部搭载了i7-5650U处理器。测试在室内环境下进行,最大测量距离为5 m,测量轨道宽度10 cm。
4.1 轨道提取实验
经多次扫描并设置不同的扫描场景可以得到多组不同的点云,利用上文提到的方法对点云进行处理得到表1所示结果。

表1 轨道点云提取实验结果
从表1可以看出,轨道点云提取的准确率高达93%,基本保留了轨道的轮廓信息,不过尚有7%的点无法提取出来。分析可以知道,这些点应该基本分布于轨道点云的两侧边界处,且基本上都属于在平面提取步骤当中的损失。由于本文基于主元分析法在点邻域内进行平面提取,故处于平面相交位置的诸点的邻域内存在同属两个平面的点,这导致了拟合平面方差过大,既然这些点无法并入任何一个平面中,便造成了最终的损失。
4.2 实时检测实验
在模拟环境中,设定限界的空间为距铁轨两侧各0.5 m,高度距铁轨平面1.5 m,准备了3个大小和形状均不相同的物体,分别将其置于轨道限界内,得到如表2所示的检测结果。

表2 3种异物侵限检测结果
激光雷达实时扫描点云图如图4所示,其中被圈中的点云为检测出的侵限点云,其他点云为非侵限点云。从图4看出,限界内的点云基本都被识别,检测准确率很高,且扫描与检测都是实时进行的,数据处理的效率也能满足实时性的要求。
5 结论
本文通过对限界检测问题的分析,结合限界模型的几何特征,将复杂的问题简单化,在保证检测精度的条件下,大大降低了运算量,为地铁隧道内实时侵限检测提供了解决方案。由于本文中使用多线激光雷达,每条扫描线之间存在着较大的间隔,需要结合多帧扫描数据才能提取表面特征,这在一定程度上影响了扫描的实时性和精度。在后续的研究中,可以改用固态面阵雷达,这样能够获得更多的密集型的点云,可以引入SLAM算法,提高定位精度,进而提高点云精度,获得更好的效果。
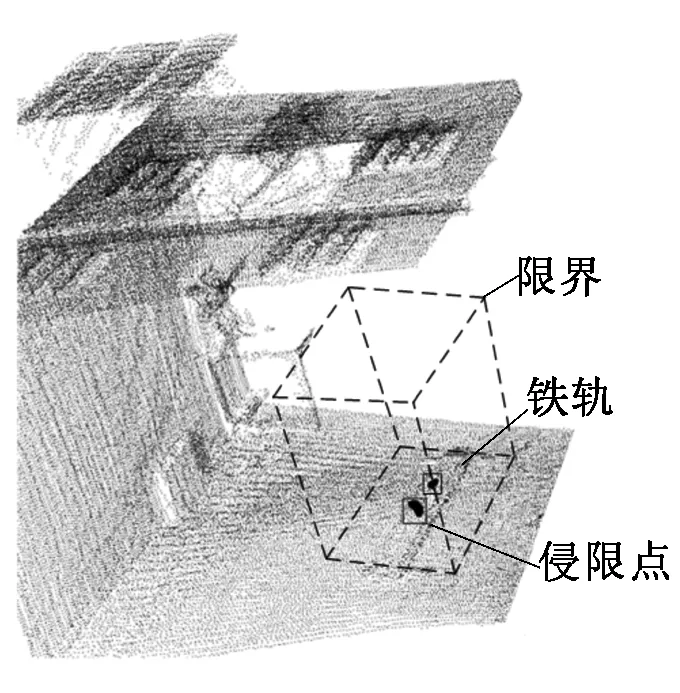
图4 激光雷达实时扫描点云图
参考文献:
[1] 成艳枝.基于图像处理的隧道衬砌裂缝检测系统设计与研究[D].太原:太原理工大学,2015:1-5.
[2] Yu S N,Jang J H,Han C S.Auto inspection system using a mobile robot for detecting concrete cracks in a tunnel[J].Automation in Construction,2007,16(3):255-261.
[3] Liu Z,Suandi S A,Ohashi T,et al.Tunnel crack detection and classification system based on image processing[C]//Electronic Imaging.International Society for Optics and Photonics.US:SPIE,2002:495-499.
[4] 刘绍堂,刘文锴,周跃寅.一种隧道整体变形监测方法及其应用[J].武汉大学学报(信息科学版),2014,39(8):981-986.
[5] Liu H L,Li S C,Li L P,et al.Study on deformation behavior at intersection of adit and major tunnel in railway[J].Ksce Journal of Civil Engineering,2017,21(6):2459-2466.
[6] Yoon J S,Sagong M,Lee J S,et al.Feature extraction of a concrete tunnel liner from 3D laser scanning data[J].NDT & E International,2009,42(2):97-105.
[7] 孙睿.光纤光栅在高速铁路异物侵限监测系统中的应用研究[D].兰州:兰州交通大学,2013:18-24.
[8] 韩志文.基于立体视觉的地铁异物侵限分析[D].北京:北京交通大学,2012:11-16.
[9] 魏巍.基于立体视觉的异物侵界检测方法研究[D].北京:北京交通大学,2014:25-29.
[10] 白素琴,史金龙,钱强,等.视觉与激光相融合的大尺度钢板三维测量[J].光电子·激光,2015,26(3):581-585.
[11] 李宝,程志全,党岗,等.三维点云法向量估计综述[J].计算机工程与应用,2010,46(23):1-7.
