电控无碳小车的设计与转向控制
2018-06-01何海燕洪明峰余菲菲
何海燕,杨 琦,洪明峰,余菲菲
(1.安徽工业大学 机械工程学院;2.安徽工业大学 创新教育学院;3.安徽工业大学 电气与信息工程学院,安徽 马鞍山 243002)
全国大学生工程训练综合能力竞赛是基于工程训练教学平台,面向全国在校本科生开展的科技创新实践的竞赛,第五届竞赛在原有的“8”形和“S”形的无碳小车赛项的基础上,新增了“以重力势能驱动的具有方向控制功能的自行小车”赛项,将机械小车与电气控制相结合,设计一个三轮小车以给定重力势能(1kg标准砝码在400±2mm的位置的势能)驱动下,沿着放有不同间距障碍物的赛道(如图1所示)行径,以避障数量的多少,前进距离的长短来评价小车的性能.

图1 赛道示意图
本文根据命题要求,设计了一款采用一级圆柱齿轮传动,使用红外、超声波等传感器检测的电控无碳小车,具有结构简单、性能稳定、拆装方便,能够适应障碍不同间距变化的特点.
1 结构设计
1.1 驱动机构设计
小车的动能来源于1KG砝码下降400mm的重力势能,重物下落时由绕线带动绕线轮转动,实现势能转化为动能,通过齿轮传递力的作用,带动后轴转动,为保证小车平稳匀速运行,减少能量损失,且考虑到小车上坡和启动力矩较大,故将绕线轮设计为锥形以调节扭矩,输出轴为细光轴以保证匀速运行.
设小车质量为m1,砝码质量为m2,D为小车后轮直径,d为绕线轮直径,重物下降的加速度为a,绳子的拉力为T,F为小车的驱动力,

绕线轴的力矩

(K为考虑绕线时的摩擦而设的系数)
采用一级齿轮传动,则后轴上产生的力矩

后轴上的力矩即为小车驱动力矩,即M=M2
由(1)(2)(3)(4)联立得

小车的传递效率是η,行驶总路程为S,砝码下落高度为400mm
由能量转换关系得到:

其中Ek为小车的动能,W损为小车运行中由于摩擦而损失的能量由(6)式可知,在保证小车稳定行驶前提下,F越小,小车前进距离越长.
由(5)式可看出,绕线轴直径与小车驱动力成正比.
本次参赛无碳小车的质量为1.5kg,绕线轴最小直径为6mm,后轮直径为120mm,采用7级精度圆柱齿轮传动(稀油润滑),传动比为6,传动效率为0.98,采用滚珠轴承(稀油润滑),传动效率为0.99,当小车匀速前进时,砝码降落的加速度a为0.
假定K为0.98,小车在运行过程中的能量损失W损=1.5J,由式5计算可得F=0.98×1×9.8×0.006/(6×0.12)=0.08N
经过试验测得,当绳子在绕线轴6mm的部分时,小车匀速运动的速度为 0.152m/s,Ek=1/2(m1+m2)v2=1/2(1.5+1)×0.1522=0.02889J
由式6计算可得
S=(1×9.8×0.4×0.98×0.99-0.02889-1.5)/0.08=28.4286m
1.2 传动机构设计
因齿轮传动具有传动比稳定,传递效率高,结构简单的特点,故采用一级齿轮传动.考虑到轴向分力,摩擦损失和调试环节的安装时间,选择直齿圆柱齿轮.
由式(5)、(6)可知,在保证小车稳定行驶的前提下,F 越小,i越大时,小车前进距离越长,对于一级直齿轮传动,传动比一般在3~6,故将传动比选定为6.
考虑到机构紧凑性,齿轮模数选定为0.5,小齿轮齿数为20.考虑到运动平稳性及摩擦损失,后轮采用两个单向轴承来产生差速驱动.在使用单向轴承时,我们提出了一个单向轴承加一个滚动轴承配对使用的方法,实验证明,该方法可有效减少摩擦损失.
1.3 转向机构设计
精准的转向控制是该小车的关键设计之一,故转向机构应尽量简单精确.此处采用直接控制法.通过舵机转向轴与前轮安装架直接相连来控制小车前轮转向,其中舵机型号为HSR-5990TG,该舵机为金属舵机,具有扭矩大,反应速度快的优良特点.
1.4 底板设计
小车的底板设计关系到小车整体机构的排布,底板的宽度和长度及部件安装位置关系到小车重心位置,进而影响到小车运行的稳定性.小车底板过小将导致小车转弯过程中重心不稳,产生倾倒翻车现象,而底盘设计过大会导致小车结构性不强,且不容易避过障碍物.综合考虑下将底盘设计成类三角形,底板材料选择钢板,厚度为5mm,宽80mm,长130mm.
2 控制系统的设计
2.1 硬件电路设计
由于本次比赛的场地设置较为简单,环境普通,考虑到性价比,最终决定使用51单片机作为主控.由于超声波可用于识别透明及漫反射性差的物体,稳定性强,测量数据精确,同时,红外测距装置制作方便,精度较高,故让两者共同作用达到测距的目的.安装时,将超声波传感器装到小车的正前方,两个红外传感器分别装到车身两侧.角度测量使用MP6050,经过对程序的不断调试,实现小车借助声光波测距来智能避障.
2.2 控制策略
接通电源后,小车首先进行初始化各个设备.开始正常工作后,超声波传感器与红外传感器一直检测障碍物,不断根据传感器所得数据计算出小车所处位置,单片机会根据传感器的信号,进行解码分析,判断避障条件,控制转向舵机工作.
2.3 转向控制
2.3.1 转弯
小车在如图1所示A-B区域进行中等角度转角,在过弯B、E区域进行大角度转角,在上下坡C-D区域进行微小角度转角来控制方向,现对A-B区域中等角度转角进行分析.
小车位于挡板前方时,会利用传感器测出距离数据来计算自己所处位置并进行轨迹预测,其中距离传感器测出小车距离右边距离d,距离前方挡板L,算出沿预测方向所需转弯角度θ
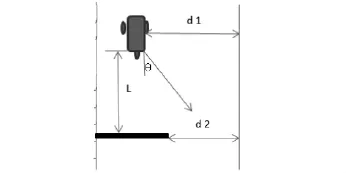
图2 小车转弯初始位置图

通过控制转向舵机进行转向,使之沿预测路线行驶.
2.3.2 偏差矫正
转向舵机转向后,由舵机转角精度等问题,导致小车的位置不会立刻转到既定的位置,而是逐渐转向,导致实际轨迹与预测轨迹产生偏差,使得小车无法顺利避障.
由于偏差现象的产生,我们需对(1)式进行校正,小车转角的弧度需要根据舵机的旋转角度计算,基本公式为:

联立(1)(2)(3)(4)即可求解出 θ 角
其中:R为圆弧半径,θ为实际转向角,α为舵机旋转角度,d为前后轮中心,K由实验测得,d1、d2、L为小车运行中距离传感器测得的值.
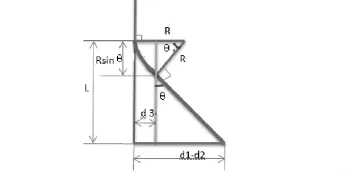
图3 小车数据处理图
2.3.3 模糊处理
实际操作中,由于转向轮与地面摩擦,导致舵机旋转角度不能立即精准的旋转到指定角度,实际轨迹会滞后于修正轨迹,所以我们采用模糊处理,采用公式

通过改变A的值,采用试凑法使小车能够顺利转弯.
当小车转弯完成后,沿斜线前进时,测量小车与外挡板的距离d,当d=B后,(B为设定值)小车方向回正,沿直线前进,回正角为上一个θ角,小车完成避障.
3 结束语
该电控小车具有结构简单,运行稳定,能适应不同间距障碍赛道的特点.有效的避障系统设计,合理地绕线轮设计,调试时尽可能地减少车体自身摩擦能量的消耗,同时减轻小车质量,合理选用材料,减少小车与地面和空气的摩擦阻力,经过反复的调试与实验,最终小车运行符合预期,在安徽省第四届工程训练综合能力竞赛中获得一等奖.
〔1〕 陈晓东,石雁南,张莉莉.无碳小车的设计、制作与创新实践[J].实验室研究与探索,2013(12):92-95.
〔2〕 张普,李森,刘洋.重力势能驱动的自控无碳小车设计,2017(04):39-41.
〔3〕 刘子浪,李德荣,林沛宣,庄集超,曾嘉煜.基于工程训练的自控行走小车结构设计与优化研究传动技术[J].2017(2):41-44.
〔4〕 谢明升,元帅,张志研,王子栋,肖强.电控无碳小车的设计及研究.山东工业技术,2017(14):197.
〔5〕 濮良贵,陈国定,吴立言.机械设计[M].第九版.北京:高等教育出版社,2013.5.
