基于特征融合的车型检测新算法
2018-06-01耿庆田于繁华王宇婷高琦坤
耿庆田,于繁华,王宇婷,高琦坤
(1.长春师范大学 计算机科学与技术学院,长春 130032;2.吉林大学 计算机科学与技术学院,长春 130012)
0 引 言
随汽车数量日益增多,交通系统的压力也越来越大。汽车车型检测作为智能交通中的关键技术,无论在交通管控还是在交通事故认定等方面等有广泛的应用。目前,常用的汽车车型检测方法有:基于地磁感应器的车型检测[1]、基于SIFT特征的车型检测[2,3]、基于小波分析的车型检测[4]、基于特征点的车型检测[5]、奇异值方法用于汽车车型检测[6]、基于神经网络的汽车车型检测[7]、基于模式匹配算法的车型检测[8]以及基于纹理特征的汽车车型检测[9]。以上检测方法能满足工程级实时性的要求,但由于特征维数高,导致检测速度慢,或由于环境背景复杂,导致检测率低。基于分类器的车型检测方法经常用于机器学习、云计算理论、人工智能等智能算法,但一般要求较大的训练样本。
本文提出了一种基于改进HOG特征提取并与LBP特征结合的车型检测方法,通过改进HOG特征并与LBP特征相融合,既提高了特征提取的速度,又改善了特征检测的精度,同时采用主成分分析(PCA)法约减维数来降低分类器的复杂性,提高图像检测速度。该方法改进了传统的单一特征提取方法。仿真实验结果表明:该方法对车辆轮廓外型检测有较好的实时性和较高的精确度。
1 改进的HOG特征算法
1.1 HOG特征对称处理
梯度方向直方图(Histogram of oriented gradient,HOG)[10]特征算子经常被用在模式检测与图像处理领域,通过用梯度的方向密度分布对目标物体的外形进行精确的描述,来实现对被检测图像中的目标物体特征向量的提取。因此,HOG特征提取从静止图像的目标检测到智能交通系统的动态目标检测均被广泛采用。
利用车辆轮廓对称性特点,本文使用HOG特征将原始车辆图像分为几个对称区域,如图1所示。

图1 图像HOG特征的对称性Fig.1 Symmetry of HOG features in an image
由图1可知HOG1与HOG2,HOG3与HOG4分别对称。由此可设S1,S2分别为对称特征的对称向量,则S1与S2也是对称关系。

图2 通道变化范围Fig.2 Channel variation range
如图2所示,每个HOG特征可通过8个Bin通道获得,但HOG特征与HOG向量需调整维数才能完全对应,过程如下:
HL=[hl1hl2hl3hl4hl5hl6hl7hl8]T
(1)
HR=[hr1hr2hr3hr4hr5hr6hr7hr8]T
(2)

(3)

S1=[s11s12s13s14s15s16s17s18]
(4)
(5)

1.2 对HOG称特征进行分层处理
为使HOG特征进一步适应环境的变化,提高车型图像的检测率,本文在对HOG特征做对称向量处理的基础上进行分层处理,如图3所示。

图3 HOG对称特征的分层过程Fig.3 Hierarchy process of HOG symmetric feature
具体算法如下:
(1)将第1层HOG特征的32维向量做对称处理,可得到16维对称向量。
(2)将灰度图像等分为4个单元,每单元等分为8个Bin通道,由此得到第1层的32维向量。
(3)将灰度图像分成9个块区域,得到9×32=288维向量。
(4)最后将所得向量串接得到336维分层HOG对称向量。
2 特征融合车型检测算法
虽然HOG特征可用来描述被检测物体的特征,但在复杂环境及光照因素的影响下,会使基于HOG特征的检测算法的检测率下降,本文融合LBP(Local binary pattern)[11,12]特征来消除由于环境复杂和光照因素的影响导致采用HOG特征时检测率下降的缺点。为提高车型的检测率及检测速度,提出了基于HOG+LBP多特征融合的车型检测算法,该算法先通过PCA算法对HOG特征进行降维改进,提高特征提取速度,然后利用改进的HOG+ LBP特征提高检测精度。
2.1 LBP特征
LBP特征具有灰度、尺度、旋转等不变性,因此对复杂背景和光照因素具有较好的鲁棒性,被用来表示图像信息的特征描述算子。LBP特征值定义
(6)

(7)
具体计算过程如图4所示,设3*3窗口的中心像素点的灰度值为80,且为阈值,与其相邻的窗口像素点的灰度值若大于阈值则标记为1,否则标记为0,由此得到LBP的二进制编码00110010,转换为十进制即得50。

图4 LBP特征值计算过程Fig.4 LBP eigenvalue calculation process
由于上述计算过程不能包含任意区域,不能精确计算复杂背景的目标图像的特征值,因此Ojala等[12]提出任意邻域的思想,并用圆形区域代替方形区域,其计算过程如下:
设T为区域内各像素灰度值的联合分布:
T=t(G1,G2,…,Gk)
(8)
式中:Go为区域中心像素点的灰度值,即阈值;Gk为与中心像素点相邻的k个取样点,则Gk的坐标为:
(xk,yk)=(xo+Rcos(2πk/h),yo-Rsin(2πk/h))
(9)
式中:(xo,yo)为区域中心点坐标;R为邻域半径;h、k分别为采样点数量和序号。则式(9)变为:
T=t(G1,G2-Go,…,Gk-Go)
(10)
假设Go与(Gk-Go)相互独立,则式(10)变为:
T=t(Go)(G1-Go,…,Gk-Go)
(11)
根据LBP特征值具有灰度不变性,而t(Go)仅表示亮度分布,它与区域特征值不相关,可忽略不计,式(11)可简化为:
T≈t(G1-Go,…,Gk-Go)
(12)
为满足LBP算子尺度不变特性,本文忽略差值大小关注差值的正负属性,则式(12)变为:
T≈t(S(G1-Go),…,S(Gk-Go))
(13)
用LBP(xo,yo)表示以(xo,yo)为中心点邻域的纹理信息,则有:
(14)
T≈t(LBP(xo,yo))
(15)
2.2 LBP特征提取
为提高抽取特征值的精度,本文在HOG特征的基础上引入LBP特征,其特征提取过程如图5所示。

图5 LBP特征提取过程Fig.5 LBP feature extraction process
2.3 PCA算法
在图像检测过程中,采用原始特征空间的高维度进行模型训练会使计算复杂度大大增加,导致样本的统计特性无法估计。因此需降低原始特征的维数。本文采用主成分分析(Principal component analysis,PCA)[13]法实现特征提取,以达到“约减维数”的目的,从而提高图像检测速度。
理想情况下,样本x的特征空间没有冗余信息,利用PCA算法可表示为:
y=MTx
(16)
(17)
式中:M=(m1,m2, …,mK)是RK特征空间的一组基底,对前k项的x进行估算,得:
(18)
由此产生的均方误差为:
(19)
根据Lagrange Multiplier算法,在满足式(20)的条件下可得到均方误差极大值表达式(21):
(S-aiI)mi=0
(20)
i=k+1,k+2,…,K
(21)
式中:yi=miTx,i=1, 2, …,K;S为x的协方差矩阵;mi为特征向量。
(22)
式中:当ai的值越小,对应的特征向量信息减损越少。
本文通过改进HOG特征并与LBP特征结合来对车型进行检测,既提高了特征提取的速度,又改善了特征检测的精度,同时采用PCA法约减维数降低了分类器的复杂程度,具体融合降维过程如图6所示。
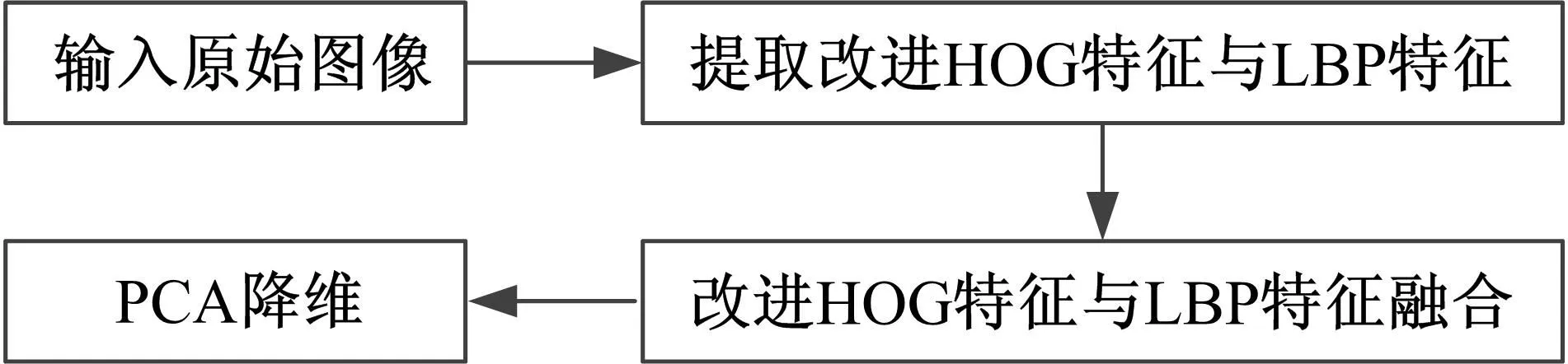
图6 特征融合流程图Fig.6 Feature fusion flow chart
2.4 SVM模型训练
支持向量机[14-17](Supper vector machine,SVM)是一种机器学习算法,以统计学为基础,使用最小化分类模型的结构风险和经验风险,在样本量不多的情况下,也能实现较好的分类效果。即SVM是通过在样本空间计算出一个最优的平面把不同的样本区分开,如图7所示。由于SVM更适合于图像检测过程中的特征值分类,因此本文选用SVM作为分类器。

图7 SVM分类示意图Fig.7 SVM classification schematic diagram
分类器常用的核函数包括:
K(x,y)=tan(a(x,y)+b)
(23)
K(x,y)=[(x,y)+1]d
(24)
(25)
K(x,y)=x,y
(26)
SVM通过分类样本的学习训练,而后达到完成分类的工作。如图8所示,H为分类面,H1、H2都平行于H,H1、H2是通过各类样本且距H最近点的超平面。若H满足分类间隔最大,则H为最优分类面。间隔越远,该分类器的推广能力就越强。
设训练样本集为S,则
S={(x1,y1),(x2,y2),…,(xn,yn)}
yi∈{-1,1}
《全日制义务教育语文课程标准》积极倡导:“语文教学应在师生平等对话的过程中进行。”教师在教学过程中应与学生积极互动、共同发展,形成“我—你”式的对话教学。
(27)
最优分割平面方程定义为:
wTx+b=0
(28)
由SVM的定义,若样本线性可分,则需满足:
yi(wTxi+b)≥1
(29)
分隔间隔表示为:
δjiange=yi(wTxi+b)
(30)
式中:yi表示所属类别,取值范围为[-1,1];xi是针对样本的特征向量。
分类器用于分类的函数简写为:
f(x)=wx+b
(31)
设阈值为0,由于样本所在类已确定,则有wx+b>0,yi>0,所以f(xi)>0;反之,有wx+b<0,yi<0,同样f(xi)>0。则有yi(wxi+b) >0始终成立,用|f(xi)|表示,说明几何间隔可用分类间隔表示:
δjihejiange=|f(x)|/‖w‖
(32)
对分类间隔进行调整后,得到最优分类面,如图8所示。
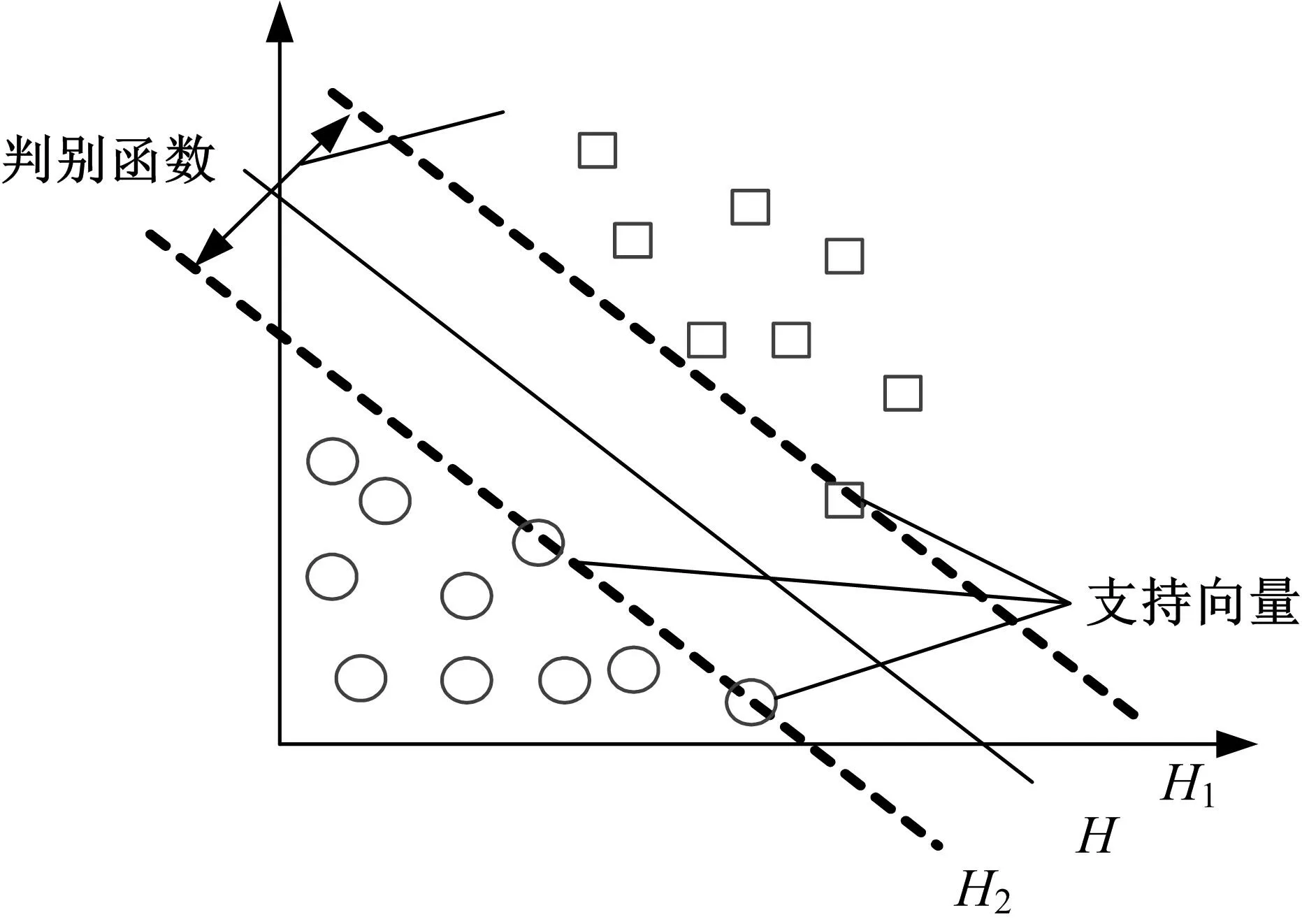
图8 最优分类面示意图Fig.8 Optimal classification plane schematic diagram
图8中,H1、H2两个分类面之间距离即是式(32)中所定义的几何间隔。
当样本发生错误分类时,错误分类的次数T为:
(33)
式中:R=‖xi‖,i=1,2,…,n,xi为第i个样本的特征向量。
特征向量大小的最大值R即为‖xi‖中的最大值。由式(33)得:错误分类次数与几何间隔为反比关系。为减少错误分类的次数,就要求有较大的几何间隔,故而,将任务调整为:
(34)
此类问题的求解可通过拉格朗日方法解决。利用拉格朗日乘子法,构造拉格朗日函数为:
L(w,b,a)=
(35)
式中:ai为拉格朗日因子,分别对w、b求解偏导数:
(36)
将式(36)的结果代回式(35),得:
(37)
对式(37)进行最值求解,结果即为所需的目标函数。
3 仿真实验对比及分析
3.1 检测率对比及分析
实验的车辆图像采用UIUC大学车型识别图库,训练样本数为2218,其中负样本数为986,使用SVM分别在HOG特征、LBP特征和融合改进的HOG+LBP特征3种不同特征条件下,每次任意选取1000幅图像进行测试,仿真实验结果如表1所示。

表1 车型检测实验结果Table 1 Model identification experimental results %
从仿真实验结果来看,在车型检测的3个算法当中,采用融合改进的HOG+LBP特征后的新特征的准确率最高,达到了95.6%,平均准确率达到94.58%。基于HOG特征方法的准确率最高达到86.4%,平均检测率达到86.4%。基于LBP特征准确率最高达到76.6%,平均准确率达到74.96%。以上实验数据表明,本文提出的特征融合算法更能精确描述图像中的车型信息。
3.2 检测时间对比及分析
对于3种方法的检测时间的优劣,本文在分辨率大小不同的正负样本中每次任意选取1000幅图片用于测试(检测时间单位是s),结果如图9和图10所示。

图9 正样本检测时间对比图Fig.9 Time contrast diagram of positive sample detection

图10 负样本检测时间对比图Fig.10 Time contrast diagram of negative sample detection
从检测时间对比图来看,在图像分辨率不同的条件下,本文提出的检测方法所用的时间最短,图像分辨率的值越高,检测时间的差距就越大。
4 结束语
本文根据智能交通系统中车辆检测精度高、速度快的要求,提出了基于改进HOG特征并融合LBP特征的车型检测方法,在车型检测过程中,根据车型所关联的外部轮廓特征,对HOG特征算法进行改进并融合LBP特征提取,最后结合支持向量机进行分类检测。经过仿真实验测试,结果表明,本文所提出的车型检测算法具有较高的检测率,并且对光线、部分遮挡噪声有较强的抗干扰性。从需求使用上来看,是现实可用、低投入高效率的应用方法;从技术使用上来看,是传统与现代相结合的有意义的尝试。
参考文献:
[1] He H, Mao C Q, Pan H Y, et al. Vehicle detection system based on magnetoresistive sensor[J]. App- lied Mechanics & Materials, 2015, 743:277-280.
[2] Wang P, Li X, Lv Z, et al. Vehicle outline detect- ion based on improved SIFT algorithm[J]. Intern- ational Journal of Earth Sciences & Engineering, 2015, 8(1): 396-400.
[3] Mu K, Hui F, Zhao X, et al. Multiple vehicle de- tection and tracking in highway traffic surveyance video based on SIFT feature matching[J]. Journal of Information Processing Systems, 2016,12(2): 183-195.
[4] Abadi E A J, Amiri S A, Goharimanesh M, et al. Vehicle model recognition based on using image processing and wavelet analysis[J]. International Journal on Smart Sensing & Intelligent Systems, 2015,29(9): 156-161.
[5] Song M. Vehicle model recognition based on SURF[J]. Journal of Information & Computational Science, 2015,12(17): 6249-6256.
[6] 魏小鹏, 于万波, 金一粟. 奇异值方法用于汽车车型识别[J].中国图象图形学报, 2003, 8(1): 50-53.
Wei Xiao-peng, Yu Wan-bo, Jin Yi-su, et al. Car shape recognition based on matrix singular value[J]. Journal of Image & Graphics, 2003, 8 (1): 50-53.
[7] He D, Lang C, Zhang C, et al. Vehicle detection and classification based on convolutional neural network[C]∥ACM International Conference on Internet Multimedia Computing and Service, New York, 2015: 3-8.
[8] Hsieh J W, Chen L C, Chen D Y, et al. Symmetrical SURF and its applications to vehicle detect- ion and vehicle make and model recognition[J]. Transactions on Intelligent Transportation Systems,IEEE, 2014, 15(1): 6- 20.
[9] Mejia-Inigo R, Barilla-Perez M E, Montes-Ven- egas H A, et al. Color-based texture image seg- mentation for vehicle detection[C]∥IEEE International Conference on Electrical Engineering, Computing Science and Automatic Control, cce. New York, 2011:1-6.
[10] 王丹, 张祥合. 基于HOG和SVM的人体行为仿生识别方法[J]. 吉林大学学报:工学版, 2013, 43(增刊1):489-492.
Wang Dan, Zhang Xiang-he. Biomimetic recognition method of human behavior based on HOG and SVM[J]. Journal of Jilin University(Engineering and Technology Edition), 2013, 43 (Sup.1): 489-492.
[11] 李宗民, 公绪超, 刘玉杰,等. 多特征联合建模的视频对象分割技术研究[J]. 计算机学报, 2013, 36(11): 2356-2363.
Li Zong-min,Gong Xu-chao,Liu Yu-jie, et al. Video object segmentation research based on features joint modeling[J]. Chinse Journal of Computers, 2013, 36(11): 2356- 2363.
[12] 王莹, 李文辉, 傅博,等. 基于水平分量优先原则的RDW-LBP人脸识别算法[J]. 吉林大学学报:工学版, 2011, 41(3): 750-757.
Wang Ying, Li Wen-hui, Fu Bo, et al. Face recognition algorithm using RDW-LBP based on horizontal component prior principle[J]. Journal of Jilin University(Engineering and Technology Edition), 2011, 41(3): 750-757.
[13] 于海琦, 刘真, 田全慧, 等. 一种基于GA-BP神经网络结合PCA的LCD显示器光谱特征化模型[J]. 液晶与显示, 2016, 31(2): 201-207.
Yu Hai-qi, Liu Zhen, Tian Quan-hui, et al. Spectral characterization model of liquid crystal display based on GA-BP neural network and PCA[J]. Chinese Journal of Liquid Crystals and Displays, 2016, 31(2): 201-207.
[14] 黄璇, 郭立红, 李姜, 等. 磷虾群算法优化支持向量机的威胁估计[J]. 光学精密工程, 2016, 24(6): 1448-1454.
Huang Xuan, Guo Li-hong, Li Jiang, et al. Threat assessment of SVM optimized by Krill Herd algorithm[J].Opt Precision Eng, 2016, 24 (6): 1448-1454.
[15] 林琳, 陈虹, 陈建, 等. 基于多核SVM-GMM的短语音说话人识别[J]. 吉林大学学报:工学版, 2013, 43(2): 504-509.
Lin Lin, Chen Hong, Chen Jian, et al. Speaker recognition with short utterances based on multiple kernel SVM-GMM[J]. Journal of Jilin University(Engineering and Technology Edition), 2013, 43(2): 504-509.
[16] 孙轶轩, 邵春福, 岳昊,等. 基于SVM灵敏度的城市交通事故严重程度影响因素分析[J]. 吉林大学学报:工学版, 2014, 44(5): 1315-1320.
Sun Yi-xuan, Shao Chun-fu,Yue Hao, et al. Urban traffic accident severity analysis based on sensitivity analysis of SVM[J]. Journal of Jilin University(Engineering and Technology Edition), 2014, 44(5): 1315-1320.
[17] 代琨,于宏毅,仇文博,等. 基于SVM的网络数据无监督特征选择算法[J]. 吉林大学学报:工学版, 2015, 45(2): 576-582.
Dai Kun, Yu Hong-yi, Qiu Wen-bo, et al. Unsupervised feature selection algorithm based on support vector machine for network data[J]. Journal of Jilin University(Engineering and Technology Edition),2015,45(2):576-582.
