位图局部敏感哈希的匹配二进制特征搜索算法
2018-06-01杨东升廉梦佳王丽娜
杨东升,张 展,2,廉梦佳,2,王丽娜,2
(1.中国科学院 沈阳计算技术研究所,沈阳 110168;2.中国科学院大学,北京 100049)
0 引 言
二进制特征是图像特征匹配和识别的先进技术,相对于SIFT[1,2]和SURF[3,4]特征,其具有有效计算、快速比较和紧密存储的优点。目前,主要二进制特征的提取算法有BRIEF[5]、ORB[6]、BRISK[7]、FREAK[8]和CBD[9]等。二进制特征即01字符串,一般使用汉明距离和最近邻比率算法[10](NNDR)判断两个二进制特征是否匹配。
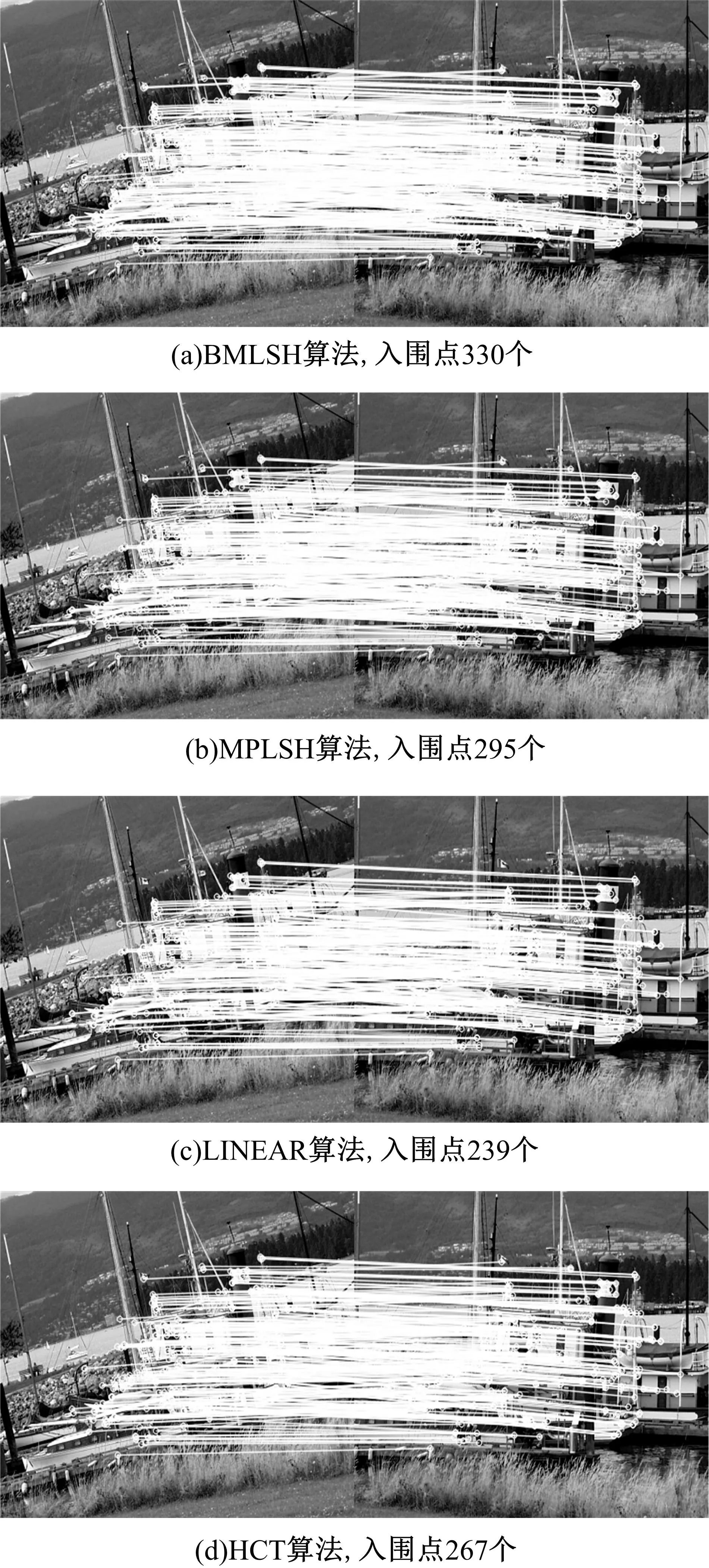
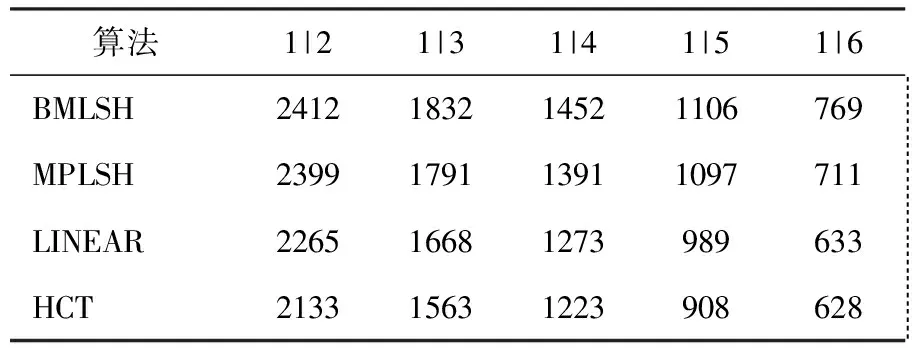
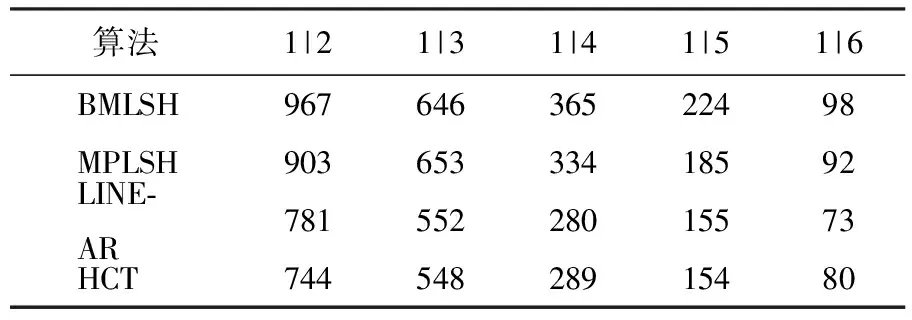
搜索匹配特征向量的算法有多种,但并不适用于搜索匹配二进制特征,因此有人提出了适用于搜索匹配二进制特征的哈希技术。例如:Indyk等[11]提出基于哈希表的近似近邻搜索算法——局部敏感哈希(LSH)算法,其只适用于欧氏空间特征向量的搜索。Lv等[12]提出多探头局部敏感哈希(MPLSH),有效地解决了高维特征的相似度搜索问题,且可用于匹配二进制特征搜索。Kong等[13]提出将曼哈顿哈希表用于大规模图像检索,把二进制特征转化为十进制数,根据曼哈顿距离计算不相似度进行查询。Shrivastave等[14]通过旋转致密化位排列哈希,实现了高维二进制特征的快速近邻搜索。Lin等[15]提出在高维数据中使用决策树快速监督哈希算法。Liong等[16]提出了基于紧凑二进制代码学习的深度哈希算法。Lin等[17]提出了二进制哈希编码的深度学习算法,实现了图像的快速检索。Norouzi等[18]在紧凑二进制代码中,给出最小亏损哈希算法;之后,采用多索引实现了在汉明空间的二进制代码子字符串的快速搜索,使在汉明空间的k近邻(KNN)搜索成为可能[19]。Muja等[20]在使用自动算法配置的快速近邻搜索中,给出多个随机KD树算法搜索高维匹配特征,在二进制特征快速匹配算法中提出了多层次聚类树(HCT)算法,在高维数据可扩展近邻算法[21]中,对近似最近邻算法做出总结,并给出相应的近似近邻快速搜索的函数库(FLANN)。文献[22]提出了位图索引的近邻搜索算法,具有占用空间少和搜索速度快的优点。
本文提出了快速计算位图(FCBM)算法和位图局部敏感哈希(BMLSH)算法,搜索两个数据集中的匹配二进制特征或相似的二进制代码,以提高匹配特征搜索效率和增加入围点数。本文实验使用文献[23]给出的图像数据集提取的ORB二进制特征,使用入围点数、入围率、平均查询时间、平均投影误差和空间复杂度等评价标准,将本文算法与FLANN函数库中的二进制特征匹配算法(包括LINEAR、MPLSH和HCT等)进行对比。实验结果表明:在相同条件下,本文算法的消耗时间少、搜索到的入围点数多、匹配入围率与平均投影误差与其他算法接近、消耗的内存空间与多探头局部敏感哈希算法相当。
1 理论基础
1.1 二进制特征
二进制特征的提取[5,24,25]是根据特征点邻域中,对应的“点对”之间灰度值大小确定特征0、1状态的取值,如式(1)所示:
(1)
设L为二进制特征的长度,F代表二进制特征,是依次将多个T(Pa)按顺序移位算出的整型数,如式(2)所示:
(2)
二进制特征(如BRIEF、ORB、BRISK和FREAK特征)在存储时,依次将每8个T(Pa)作为一个无符号字符类型(uchar,8 bit)存入内存,每个二进制特征长度为L,则每个二进制特征可以用L/8个无符号字符型表示。
1.2 局部敏感哈希


(3)

点积的投影使近邻特征映射到哈希表中相同的位置,需要的条件如下:
(1)在Rd空间(d维欧氏空间)中,任意特征向量p和q之间的距离小于等于R1,则特征向量p和q被分到同一个哈希桶的概率PH大于等于p1,如下所示:
PH=[h(p)=h(q)]≥p1
for‖p-q‖≤R1
(4)
式中:‖•‖为L2范数。
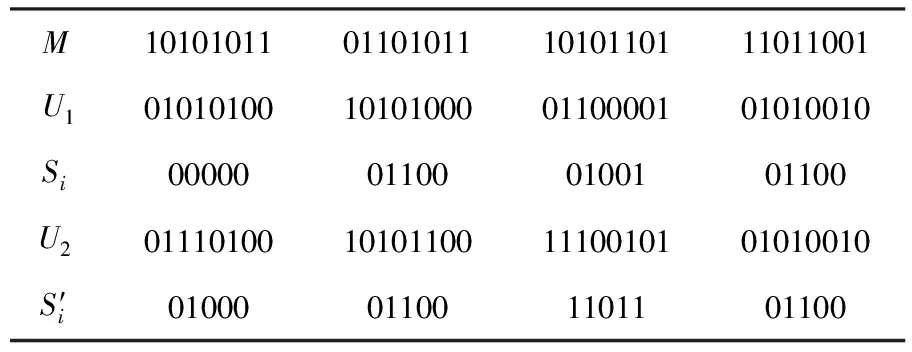
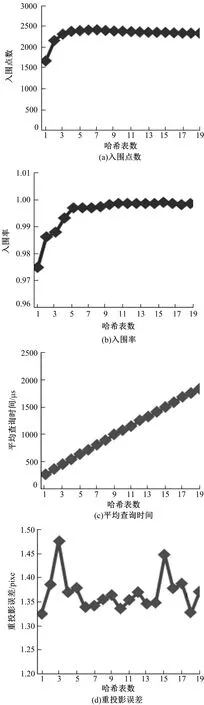
(2)在Rd空间,任意特征向量p和q之间的距离大于等于R2,则特征向量p和q被分到同一个哈希桶的概率PH很小,小于等于p2,且p2 PH=[h(p)=h(q)]≤p2 for ‖p-q‖≥cR1=R2 (5) 注意,由于线性点积,两特征向量p和q所在哈希桶的距离‖h(p)-h(q)‖拥有的量级分布与‖p-q‖成比例,因此p1>p2。 位图索引V是一个长度为N的聚集位向量[22],每位的状态只能是0或1。在位向量V中第i位的状态,取决于对应的记录,如果该位置的记录是t,则该位为1;否则为0。举例说明:当前的文件中,有6个记录,每条记录是(int,binary)的点对,编号为1到6,并依次为:(30,101),(30,010),(40,011),(50,101),(40,010),(30,011)。 例子中,有6条点对记录,所以位向量长度为6,第1条、第2条和第6条的整型记录为30,所以整型记录30对应的位向量为110001;同理,整型记录40和50对应的位向量分别为001010和000100。例子中,第1条和第4条的二进制记录为101,所以二进制记录101对应的位向量为100100;同理,二进制记录010和011对应的位向量分别为010010和001001。 二进制特征是高维的位向量,比如BRIEF、ORB特征是256位,BRISK、FREAK特征为512位。本文以ORB二进制特征为例,描述本文FCBM算法。ORB特征以无符号字符型(uchar)的形式存储在内存,所以256位的ORB特征在内存中存储了32个无符号字符型数。FCBM算法的主要目的是让近邻的二进制特征获得相同的或近邻的位图,并使计算位图的速度更快。 FCBM算法如下:首先从一个无符号字符型数(8 bit)中选取5 bit,组成一个5 bit的无符号字符类型数Si,Si∈[0,31],则长度为32个无符号类型的ORB特征,经过以上处理可以得到32个Si,将Si按照ORB特征中对应无符号类型数的排序,依次编号为1~32,则每个ORB特征对应的记录为S=S1S2…S32;Si∈[0,31],即S的每个位置上的记录Si∈[0,31]。然后,按照1.3节的方法计算位图,记录0~31都有一个对应的位向量设为Bj,j∈[0,31],将位向量Bj转化为32 bit无符号整型数,存储于内存中。最后,将近邻记录的位向量按位或得到最终位向量作为ORB二进制特征的位图。ORB特征由32个无符号字符型组成,只取前4个对FCBM算法进行举例说明。 表1 无符号字符型的取位Table 1 Getting bits of unsigned characters 表2 记录Si和对应的位向量Table 2 Bit vector of Si and 将每个二进制特征的位图或其位图的一部分作为关键字,将关键字与二进制特征的ID作为映射存入每个哈希表相应的桶中。每个哈希表都有一个与关键字长度一致的掩码,目的是再计算二进制特征的位图时,避开近邻特征中不一样的位和降维。一般构建多个哈希表,哈希表中的一个哈希桶对应一个关键字,一个关键字对应一个或者多个二进制特征ID。因为ORB二进制特征是由256位组成,即32个uchar类型,所以ORB二进制特征位图是32维的位向量,转化成32 bit的无符号整型数,保存在内存中。 位集(bitset)是快速查询关键字是否存在的一种算法。本文使用位集对匹配二进制特征的查询进行优化,以快速判断当前查询特征是否存在于哈希表中。初始化位集为0,首先根据式(6)将哈希表中所有的关键字key存储到位集bitset[]中,如下所示: bitset[key/32]|=(1<<(key%32)) (6) 查询时,根据式(7)判断当前查询关键字是否存在于哈希表中: bitset[key/32]&(1<<(key%32))!=0 (7) 若当前计算结果为0,则关键字不存在;若计算结果不为0,说明关键字存在,则查询与当前哈希表对应的桶。 在位集中,若当前关键字存在于哈希表中,则查询关键字对应的哈希桶中所有ID相应的二进制特征,计算当前关键字相应的二进制特征与ID相应二进制特征的汉明距离,当遇到与当前查询二进制特征的最近邻特征和次近邻特征时,保存相应的ID以及最近邻和次近邻距离。设最近邻距离为d1,次近邻距离为d2,根据NNDR算法,判断当前查询特征与ID相应的二进制特征是否匹配,如式(8)所示: R=d1/d2 (8) 若满足阈值条件R<0.6,则匹配;否则不匹配。 实验包括5个部分:①计算位图:提取左、右两图像的二进制特征,使用FCBM算法,分段依次计算每个二进制特征对应的位图。②构建哈希表:使用左图二进制特征对应位图作为关键字,将关键字与二进制特征的ID作为映射,存入每个哈希表里相应的桶中,一个关键字可以对应多个二进制特征的ID。③位集优化搜索:将哈希表中的关键字存到位集中,原因是位集可以快速判断当前查询关键字是否存在于当前哈希表中。④保存查询信息:若右图特征对应关键字存在于哈希表中,则计算左图关键字对应二进制特征与当前右图特征的汉明距离,保存当前特征的最近邻和次近邻距离以及关键字对应特征的ID。⑤匹配入围点判断:使用NNDR算法,判断左、右两图二进制特征是否匹配,根据左、右图像匹配点集合,计算左图转到右图点的旋转矩阵,旋转矩阵乘以左图点得到的坐标与对应右图点坐标的距离叫投影误差,根据投影误差判断当前点是否是入围点,入围点数除以匹配点数即为匹配入围率。 实验使用Windows7操作系统,OPENCV图像处理函数库;使用文献[23]给出图像数据集所提取的ORB二进制特征作为算法评价数据集。文献[23]给出的图像数据集中,每个图库有6幅图像,且每个图库里的图像都是同一场景在不同情况下拍摄的。实验时使用其中的5个图库,包括bike、boat、luven、trees和ubc图库,同一图库将第1幅图像提取的ORB特征作为训练特征,其他图像提取的ORB特征作为匹配查询二进制特征,图库中每张图提取的ORB特征数如表3所示。使用搜索算法,查询左图与右图的匹配二进制特征,计算两图的匹配点数、入围点数、入围率和平均投影误差等。将本文算法与FLANN函数库中的搜索匹配二进制特征的算法进行对比,包括LINEAR、MPLSH和HCT算法等。 表3 提取不同数据集中各图像的ORB特征个数Table 3 Number of ORB features for extracting each image in different dataset 3.2.1 哈希表数目不同 本文BMLSH算法有两个变量,分别是哈希表数和关键字长度。如图1所示,本文算法的定量分析图,设置关键字长度为20,提取bike图库中bike1图的ORB特征为5972个,bike2图的ORB特征为5067个。由图1(a)可以看出:本文算法搜索到的入围点数在哈希表数不少于3个时,入围点数大于2300,并且随着表数的增加,入围点数先是快速增加随后趋于稳定;由图1(b)可以看出:本文算法的入围率高,入围率随着哈希表数的增加先是增加随后趋于稳定;由图1(c)可以看出:本文算法的平均查询时间随着哈希表数的增加呈线性增长;由图1(d)可以看出,本文算法搜索到入围点的平均投影误差小于1.5 pixel。 3.2.2 关键字长度不同 图2为不同关键字长度时本文算法的性能,定量设置哈希表数为5和12,提取bike图库中bike1图的ORB特征为5972个,bike2图的ORB特征为5067个。由于3.2.1节入围点数入围率在哈希表数为5时接近最大,在哈希表数为12时趋于稳定,所以设置两个定量分析:当哈希表数为5时,设置关键字长度为14~25;当哈希表数为12时,设置关键字长度为15~27。 图1 不同哈希表数量时本文算法的性能Fig.1 Performance of proposed method under different number of hash tables 由图2(a)(b)(c)可知:随着关键字长度的增加,入围点数先增加后减小,入围率逐渐减少,平均查找时间逐渐减少,在关键字长度为20左右时,入围点数最多,入围率最高,平均查询时间适中;由图2(d)(e)(f)可知:随着关键字长度的增加,入围点数先增加后减小,入围率逐渐减少,平均查询时间逐渐减少,在关键字长度为20左右时,入围点数最多,入围率最高,平均查询时间适中。 3.2.3 不同算法性能的对比 图3 使用bike图库时不同算法的性能Fig.3 Performance of different algorithms test bike dataset 图3为LINEAR、MPLSH和HCT算法,与本文BMLSH算法的性能对比。其中,提取bike图库中6张图像的ORB特征数,如表3所示。本文以bike1作为源图像提取ORB特征作为训练特征,其他图像(bike2、bike3、bike4、bike5和bike6)提取的ORB特征作为查询特征,bike图库中的图像随着编号的增加其模糊程度也增加。在相同的情况下,图3(a)表明本文算法的入围点数比其他算法多40个以上;图3(b)表明,随着查询特征的增加,本文算法所需查询时间的增加程度小,所需的查询时间少;图3(c)表明本文算法的查询入围率大于95.8%,与其他算法相当;图3(d)表明本文算法平均投影误差与其他算法接近。 图4为使用boat图库,不同算法的性能对比。提取boat图库中6张图像的ORB特征数,如表3所示。boat1~boat6图像是不同视角不同旋转角度下拍摄的图像。在相同的情况下,图4(a)表明本文算法的入围点数多比其他算法至少多11个;图4(b)表明,在查询特征数目一定时,本文算法所需查询时间少且稳定,为622.899~664.01 μs;图4(c)表明本文算法的查询入围率大于85%,与其他算法相当;图4(d)表明本文算法平均投影误差与其他算法接近。 3.2.4 特征匹配效果对比 图5 不同算法的入围点连线图Fig.5 Inliers connection diagram of different algorithms 图5为本文BMLSH算法与其他算法的入围点连线效果图。实验使用boat图库,提取boat1和boat2图像的ORB特征分别为1500和1497个。本文BMLSH算法搜索到的入围点数为330个,MPLSH算法搜到295个,LINEAR算法搜到239个,HCT算法搜索到267个。比较入围点连线图5(a)与图5(b)(c)(d)可知,本文BMLSH算法的入围点连线比较稠密,匹配入围点数较多。 表4为不同算法使用luven图库查询匹配特征的入围点数,1|2是指luven1和luven2组成的图像对。表5为不同算法使用luven图库查询匹配特征的平均查询时间。由表5可知:本文BMLSH算法查询的入围点数多,比其他算法多9个以上,平均查询时间短,在666.046 μs以下。表6为不同算法使用trees图库查询匹配特征的入围点数。表7是不同算法使用trees图库查询匹配特征的平均查询时间。由表7可知:本文BMLSH算法的查询入围点数多,平均查询时间最短,在636.796 μs以下。 表4 luven 图库不同算法的入围点数Table 4 Number of inliers for different algorithms under luven dataset 表5 luven图库不同算法的平均查询时间Table 5 Average query time by different algorithms under luven dataset μs 表6 trees图库不同算法的入围点数Table 6 Number of inliers for different algorithms under trees dataset 表7 trees图库不同算法的平均查询时间Table 7 Average query time by different algorithms under trees dataset μs 针对线性搜索、层次聚类树等查询匹配二进制特征时,效率低和入围点数少的问题,本文提出了快速计算位图(FCBM)算法以及位图局部敏感哈希(BMLSH)算法。本文算法可用于匹配二进制特征的搜索、二进制特征识别、图像定位和拼接等领域。实验证明:在相同条件下,本文算法的消耗时间少,搜索到的入围点数多,入围率和平均重投影误差与其他算法接近,消耗的内存空间与多探头局部敏感哈希算法相当。 参考文献: [1] Lowe D G. Distinctive image features from scale-invariant keypoints[J]. International Journal of Computer Vision,2004,60(2):91-110. [2] 聂海涛,龙科慧,马军,等. 基于快速SIFT算法和模糊控制的人脸识别[J]. 吉林大学学报:工学版,2016,46(2):549-555. Nie Hai-tao,Long Ke-hui,Ma Jun,et al. Face recognition based on fast scale invariant feature algorithm and fuzzy control[J]. Journal of Jilin University (Engineering and Technology Edition),2016,46(2):549-555. [3] Bay H,Ess A,Tuytelaars T,et al. Speeded-up robust features (surf)[J]. Computer Vision and Image Understanding,2008,110(3):346-359. [4] 郭清达,全燕鸣,姜长城,等. 应用摄像机位姿估计的点云初始配准[J]. 光学精密工程,2017,25(6):1635-1651. Guo Qing-da,Quan Yan-ming,Jiang Chang-cheng,et al. Initial registration of point clouds using camera pos estimation[J]. Optics and Precision Engineering,2017,25(6):1635-1651. [5] Calonder M, Lepetit V, Strecha C,et al. BRIEF:binary robust independent elementary features[J/OL].[2017-03-22]. http:∥icwww.epfl.ch/~lepetit/papers/calonder_eccv10.pdf. [6] Rublee E, Rabaud V, Konolige K, et al. ORB:an efficient alternative to SIFT or SURF[J/OL].[2017-03-25].http:∥www.cs.zju.edu.cn/~gpan/course/materials/ORB.pdf. [7] Leutenegger S, Chli M, Siegwart R Y. BRISK: binary robust invariant scalable keypoints[J/OL].[2017-03-23]. http:∥www.robots.ox.ac.uk/~vgg/rg/papers/brisk.pdf. [8] Alahi A, Ortiz R, Vandergheynst P. FREAK:fast retina keypoint[J/OL].[2017-03-24]. https:∥infoscience.epfl.ch/record/175537/files/2069.pdf. [9] 张展,杨东升. 圆周二进制描述符的图像点特征提取方法[J]. 计算机辅助设计与图形学学报,2017,29(8):1465-1476. Zhang Zhan,Yang Dong-sheng. Image point feature extraction algorithm of circumferential binary descriptor[J]. Journal of Computer-Aided Design & Computer Grphics,2017,29(8):1465-1476. [10] Richard Szeliski. 计算机视觉-算法与应用[M]. 艾海舟,兴军亮译. 北京:清华大学出版社,2012:175-176. [11] Indyk P, Motwani R. Approximate nearest neighbor: towards removing the curse of dimensionality[J/OL].[2017-03-23]. http:∥www.cs.princeton.edu/courses/archive/spr04/cos598B/bib/IndykM-curse.pdf. [12] Lv Qin, Josephson William, Wang Zhe, et al. Multi-probe LSH: efficient indexing for high-dimensional similarity search[J/OL].[2017-03-24]. http://www.cs.princeton.edu/cass/papers/mplsh_vldb07.pdf. [13] Kong Wei-hao,Li Wu-jun,Guo Min-yi. Manhattan hashing for large-scale image retrieval[C]∥Proceedings of the 35th International ACM SIGIR Conference on Research and Development in Information Retrieval, New York, NY, USA,2012:45-54. [14] Shrivastave Anshumali, Li Ping. Densifying one permutation hashing via rotation for fast near neighbor search[J/OL].[2017-03-23]. http:∥proceedings.mlr.press/v32/shrivastava14.pdf. [15] Lin Guo-sheng,Shen Chun-hua,Shi Qin-fen,et al. Fast supervised hashing with decision trees for high-dimensional data[C]∥IEEE Conference on Computer Vision& Pattern Recognition, Columbus, OH, USA, 2014:1971-1978. [16] Liong Venice Erin, Lu Ji-wen, Wang Gang, et al. Deep hashing for compact binary codes learning[J/OL]. [2017-03-23].https://www.cv-foundation.org/openaccess/content_cvpr_2015/papers/Liong_Deep_Hashing_for_2015_CVPR_paper.pdf. [17] Lin Kevin, Yang Huei-fang, Hsiao Jen-hao, et al. Deep learning of binary hash codes for fast image retrieval[J/OL].[2017-03-22]. http:∥www.iis.sinica.edu.tw/~kevinlin311.tw/cvprw15.pdf. [18] Norouzi M, Fleet D J. Minimal loss hashing for compact binary codes[C]∥Proceedings of the 28th International Conference on Machine Learning, Bellevue, Washington, USA,2011:353-360. [19] Norouzi M, Punjani A, Fleet D J. Fast search in hamming space with multi-index hashing[J/OL].[2017-03-25]. https:∥www.cs.toronto.edu/~norouzi/research/papers/multi_index_hashing.pdf. [20] Muja M, Lowe D G. Fast matching of binary features[C]∥2012 Ninth Conference on Computer and Robot Vision, Toronto, ON, Canada,2012:404-410. [21] Muja M, Lowe D G. Scalable nearest neighbor algorithms for high dimensional data[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence,2014,36(11):2227-2240. [22] Garcia-Molina H, Ullman J D, Widom J. 数据库系统实现[M]. 杨冬青,吴愈青,包小源译. 2版. 北京:机械工业出版社,2010:688-693. [23] Mikolajczyk K, Schmid C. A performance evaluation of local descriptors[J]. IEEE Transactions on Pattern Analysis &Machine Intelligence,2005,27(10):1615-1630. [24] 邹瑜,梁斌,王学谦,等. 基于旋转投影二进制描述符的空间目标位姿估计[J]. 光学精密工程,2017,25(11):2958-2967. Zou Yu,Liang Bin,Wang Xue-qian,et al. Spacetarget pose estimation based on binary rotational projection histogram[J]. Optics and Precision Engineering,2017,25(11):2958-2967. [25] 崔少辉,谢征,王刚,等. 二进制鲁棒不变尺度特征匹配电子稳像[J]. 光学精密工程,2015,23(9):2715-2723. Cui Shao-hui,Xie Zheng,Wang Gang,et al. Feature matching electronic image stabilization based on binary robust in variant scalable keypionts[J]. Optics and Precision Engineering,2015,23(9):2715-2723. [26] 罗家祥,林畅赫,王加朋,等.结合深度卷积网络与加速鲁棒特征配准的图像精准定位[J].光学精密工程,2017,25(2):469-476. Luo Jia-xiang,Lin Chang-he,Wang Jia-peng,et al. Accurate image positioning combining deep convolution network with SURF registering[J]. Optics and Precision Engineering,2017,25(2):469-476. [27] 熊昌镇,单艳梅,郭芬红.结合主体检测的图像检索方法[J].光学精密工程,2017,25(3):792-798. Xiong Chang-zhen, Shan Yan-mei, Guo Fen-hong. Image retrieval method based on image principal part detection[J]. Optics and Precision Engineering,2017,25(3):792-798.1.3 位图索引
2 位图局部敏感哈希
2.1 计算二进制特征的位图




2.2 哈希表构建和位集优化查询
2.3 保存查询信息与特征匹配判断
3 实验验证
3.1 实验设计

3.2 实验数据及对比分析


4 结束语
