四象限探测器定位精度的分析与仿真
2018-05-26宋哲宇付芸范新坤吴凯
宋哲宇,付芸,范新坤,吴凯
(长春理工大学 光电工程学院,长春 130022)
四象限探测器(QD)具有响应快、动态范围宽、灵敏度高、体积小等特点,广泛应用在光电跟踪领域[1]。在空间激光通信系统中,利用四象限探测器这种具有高分辨率、高帧频的位置探测器件,作为精跟踪单元探测器实现光斑质心的精确计算,为伺服系统提供脱靶量数据,完成闭环跟踪。在激光通信工作过程中,光斑的大小与位置、背景光噪声、光斑能量分布等因素会影响系统的跟踪精度,从而影响空间激光通信的性能[2]。
对于提高位置检测精度,中国科学院光电技术研究所马晓燠老师分析了在有噪声和死区的条件下的四象限探测器的光斑能量探测率、质心探测误差和光斑位移灵敏度。分析和实验的结果都表明,在相同的噪声情况下,质心探测误差和位移灵敏度都随着光斑的高斯宽度与死区宽度之比的减小而增大,但是前者增大的趋势要大于后者增大的趋势,这将导致光斑的高斯宽度与死区宽度之比越大,四象限跟踪探测器的跟踪误差也就越小[3]。长春理工大学计算机科学技术学院韩成等人分析了光斑大小对动态范围和探测灵敏度的影响情况,结果表明,随着光斑半径的增加,光斑位置检测的动态范围在变大,并且对影响探测精度的多种因素进行了仿真[4]。中科院长春光学精密机械及物理研究所,周子云团队提出了一种基于四象限探测器的光斑中心定位算法,采用均匀分布的椭圆模型对光斑进行分析,结果表明,所提算法能有效提高四象限探测器的定位精度,较传统方法精度提高21.3%[5]。
基于以上研究成果,本文通过对四象限探测器的位置检测工作原理的研究,通过仿真详细分析了影响四象限探测器定位精度的各个因素,在作为精跟踪探测器时,提高其跟踪精度,提升了空间激光通信系统的通信性能。
1 四象限探测器位置检测工作原理
四象限探测器是将四个性能一样的光电二极管按照四象限分布的方式排列而成,根据光敏面上接收的光能量,检测相应的光电流的大小,解算出光斑的坐标信息。如图1所示,光斑在光敏面上的形状为圆形,设四个象限接收到的光功率分别为PA、PB、PC、PD,光斑在光敏面上的覆盖面积为SA、SB、SC、SD,对应产生的光电流为IA、IB、IC、ID。当光斑偏离探测器中心时,光斑在各象限的面积变化引起相应光电流的变化,得到光斑在QD光敏面上的相对偏移量Δx,Δy为:

式中,Kx、Ky分别为QD在x轴和y轴方向上的检测灵敏度。
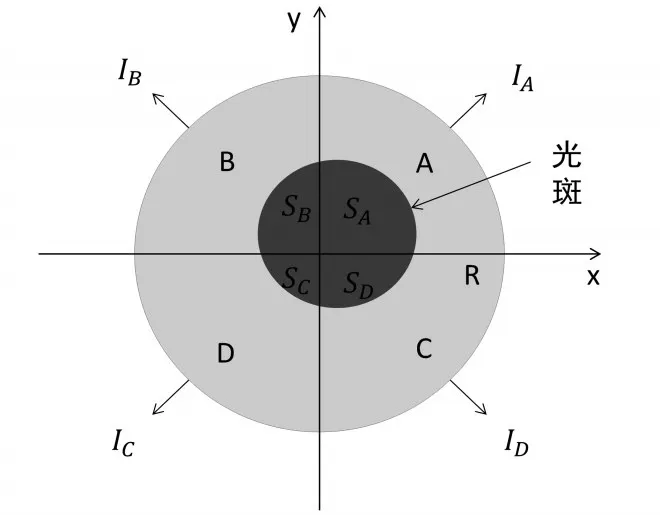
图1 四象限探测器工作原理
2 影响因素分析
针对四象限探测器在空间激光通信系统中的光斑检测原理,分析影响定位精度的主要因素并进行仿真,对提高光斑定位精度提供可靠的技术支持。本文通过对探测器的深入研究,主要完成了光斑半径、光斑位置、背景光、光斑能量分布、探测器死区宽度、系统信噪比对探测器定位精度影响的仿真分析[6]。
2.1 光斑半径与光斑位置的影响
在空间激光通信系统中,忽略大气信道、背景光等影响时,探测器接收到的光斑能量分布通常为高斯分布。由于光斑在X轴和Y轴偏移具有类似特性,本文以光斑在X轴上的偏移为研究对象,通过改变光斑半径的大小(r=0.5,1,1.5mm),利用Matlab仿真分析光斑中心实际偏移量与公式解算偏移量的关系如图2所示。从图2可以看出,随着光斑半径的增大,探测器的线性范围也增大,但是曲线的斜率变小了,即四象限探测器的探测灵敏度降低了。因此,可通过减小光斑直径来提高位置检测精度[7]。
当光斑半径一定时,在整个动态范围内,靠近探测器中心处的斜率系数较好,而在曲线边缘线性较差,在精跟踪阶段,使光斑动态保持在中心区域内。实际应用时,既要考虑四象限探测器的检测灵敏度又要兼顾其跟踪范围,一般选择光斑大小为探测器光敏面尺寸的一半。图3为光斑中心实际位置与计算偏移量斜率的关系曲线图,可以看出,光斑半径的增大使斜率的最大值减小,与上述分析一致。

图2 光斑中心实际位置与计算偏移量之间的关系

图3 光斑中心实际位置与计算偏移量斜率的关系
2.2 背景光的影响
在空间激光通信系统中,背景光的存在会使探测器接收到的总能量增加,造成输出电流为光电流与背景光电流的叠加[8]。图4为不同比例下的背景光与x轴脱靶量的关系曲线图。可以看出,随着背景光的增加,QD的斜率系数在不断减小,使光斑位置检测精度和灵敏度都在一定程度上降低。通过分析与仿真可知,背景光对光斑定位精度有很大的影响,需要采取一定的措施进行有效抑制。通常采取的措施有:在光学系统中添加窄带滤波片;设计高通滤波器对接收到的低频背景光噪声进行滤除;通过减小接收视场角和口径来减少背景光的进入。
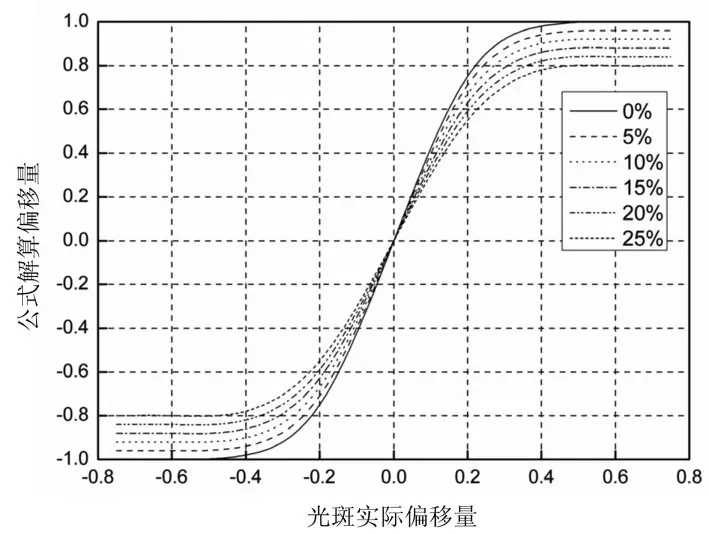
图4 不同比例背景光与X轴脱靶量的关系
2.3 光斑能量分布的影响
由于激光在传输过程中受到大气信道、背景光以及接收光端机的振动等因素的影响造成探测器接收到的光斑能量在不断变化[9]。通常情况下,光斑的能量分布为高斯分布、均匀分布、艾利分布。图5为不同模式下的光斑中心与探测器的输出值的关系。从图5可以看出,艾利分布下的光斑斜率最陡,表明检测灵敏度最高,但是线性动态范围最小;均匀分布下的光斑位置检测灵敏度最差,但是线性动态范围最大。实验时,在保证较大线性动态范围时应尽量使QD靠近光学系统的焦平面,以获得较高的检测灵敏度,所以实际工作时为离焦的高斯光斑。
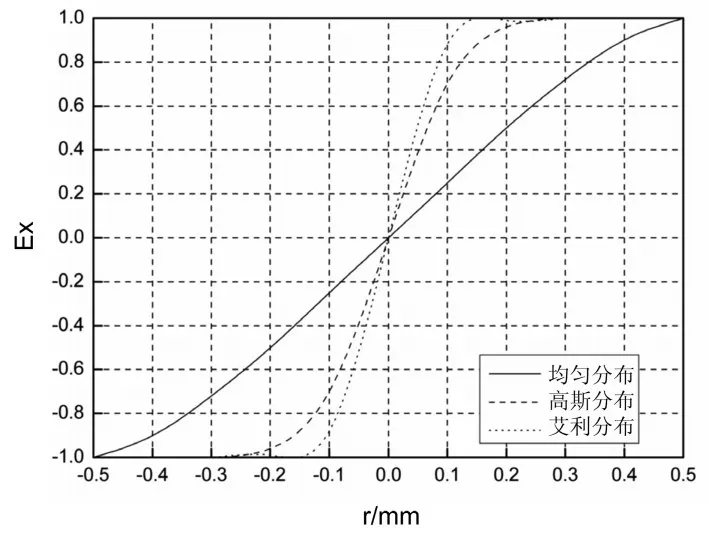
图5 不同模式下光斑中心与探测器输出值的关系
2.4 探测器死区宽度的影响
四象限探测器的死区将四个光电二极管分割,防止产生相互串扰。由于死区并不会对光照产生光信号,造成光斑总能量的减少,从而影响光斑检测精度。一般四象限探测器的死区宽度在几十微米到一百微米左右,相对于探测器光敏面尺寸要小1~2个数量级。考虑到死区宽度较小,分析时光斑尺寸不宜选择太大。

图6 不同死区宽度下公式解算偏移量随光斑位置的变化曲线
假设光斑半径为0.5mm,死区宽度为0、0.06mm、0.1mm分别进行仿真,得到归一化的公式解算偏移量X随光斑实际位置的变化曲线,如图6所示。当光斑半径一定时,随着死区宽度的增大,四象限探测器的线性动态范围将减小。
当死区宽度一定时,对光斑半径R为0.4mm和0.6mm分别进行仿真,如图7所示。可以看出,当光斑半径减小时,四象限探测器的线性动态范围减小,检测灵敏度得到了提高。
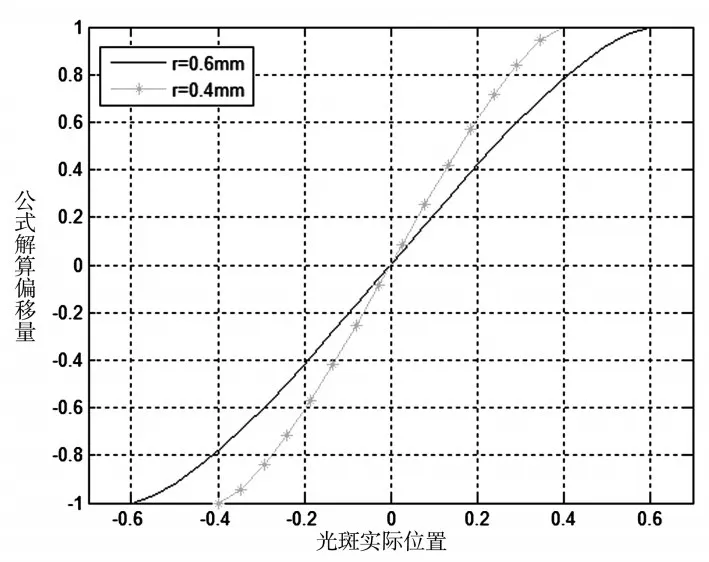
图7 不同光斑半径下公式解算偏移量随光斑位置的变化曲线
2.5 系统信噪比的影响
四象限探测器在工作过程中,会受到暗电流、背景光、散粒噪声等因素的影响,使光斑坐标解算值受噪声的影响波动大。当噪声信号过大,有用信号将会被淹没,造成通信系统的中断[10]。因此,提高系统信噪比对于提高位置检测精度起到关键作用。假设光斑半径r=1mm,光斑正位于光敏面中心,光斑位置标准差随信噪比(SNR)变化的仿真曲线如图8所示。当信噪比SNR<1时,曲线急剧下降,此时的光斑检测精度较低,分析原因为系统信噪比过小使光斑信号被噪声引号淹没所导致的。图9为对数坐标下,系统信噪比从5dB逐渐增大到50dB时光斑位置标准差(Er)的变化曲线。通过分析图8与图9可以得到,系统信噪比的提高对提高位置检测精度是最直接有效的方式。

图8 不同信噪比下光斑位置标准差仿真曲线

图9 对数坐标下Er的仿真曲线
3 结论
本文通过对四象限探测器的工作原理进行研究,仿真分析了光斑半径、光斑位置、背景光、光斑能量分布、探测器死区宽度、系统信噪比对探测器定位精度的影响。研究结果可以看出:光斑半径的增大使斜率的最大值减小,即四象限探测器的探测灵敏度降低,因此减小光斑直径可提高位置检测精度;背景光的存在会使探测器接收到的总能量增加,减小接收视场角和口径来减少背景光的进入;当光斑能量分布为高斯分布时,能够保证在较大线性动态范围的前提下,使QD尽可能地靠近光学系统的焦平面,以获得较高的检测灵敏度;光斑半径一定时,随着死区宽度的增大,四象限探测器的线性动态范围将减小,降低了探测器的检测范围;提高系统信噪比可以明显地提高探测器位置检测精度。以上仿真分析结果可以为QD在空间激光通信系统中的应用起指导作用,为今后的研究工作奠定了基础。
参考文献
[1] 赵馨,佟首峰,刘云清,等.四象限探测器在空间激光通信中应用研究[J].光电子·激光,2010,21(1):46-49.
[2] 范新坤,张磊,佟首峰,等.天空背景光对空间激光通信系统的影响[J].激光与光电子学进展,2017,54(7):96-104.
[3] 马晓燠,母杰,饶长辉,等.死区对四象限跟踪传感器跟踪精度的影响[J].物理学报,2012,61(7):1514-1521.
[4] 韩成,白宝兴,杨华民,等.自由空间激光通信四象限探测器性能研究[J].中国激光,2009,36(8):2023-2029.
[5] 周子云,高云国,邵帅,等.采用四象限探测器的光斑中心定位算法[J].计算机测量与控制,2014,22(7):2154-2156.
[6] 张辉,陈云善,耿天文,等.四象限探测器位置检测精度的主要影响因素研究[J].中国激光,2015,42(12):0906009-1-0906009-7.
[7] 李龙龙,刘智,张广栋,等.高斯激光束大气湍流传输的建模与仿真[J].长春理工大学学报:自然科学版,2017,40(03):67-70.
[8] 张爱丽.强天空背景光条件下空间激光通信系统的光斑检测技术研究[D].长春:长春理工大学,2011.
[9] 母一宁,宋路.大气信道无线激光通信系统设计方法研究[J].长春理工大学学报:自然科学版,2015,38(4):57-60.
[10] 范新坤,张磊,宋延嵩,等.四象限探测器的跟踪与通信复合探测技术[J].中国激光,2017,44(09):0906009-1-0906009-8.
