基于软件设计的空间望远镜主镜力促动器控制系统
2018-05-26韩雪曹小涛杨维帆
韩雪,曹小涛,杨维帆
(中国科学院长春光学精密机械与物理研究所,长春 130033)
望远镜的口径越大,其集光能力越强、分辨能力越高,获取天体信息的能力也越强,越有利于航空航天、现代天文、国防军事等领域的深入发展。随着望远镜口径的增大,主镜重力变形和热变形问题尤为突出,严重影响成像质量。传统的被动支撑方式很难保证主镜的面形精度,因此主动光学技术迅速发展并逐渐成熟[1]。目前大口径望远镜大多采用了主动光学技术[2],通过检测望远镜的波前像差,利用主镜背后的力促动器来实现复杂外界因素下主镜的面形保持或校正,使望远镜始终保持优良的成像质量[3,4]。
在主动光学中,力促动器是定位支撑机构,也是校正镜面面形的执行机构[5-8]。力促动器要保证具有促动精度高、线性度好、响应速率快和运动平滑的特点[9,10]。因此开发一种满足上述要求的力促动器控制软件具有重要意义。
本文设计了力促动器的控制系统,该控制系统采用PID控制算法实现力与位移双闭环控制,由上位机软件实现系统控制。其中,力促动器采用了结构简单的电机和丝杠结构,作为空间望远镜主镜面形校正的执行机构。该控制系统包括机械传动机构、驱动控制系统和反馈环节三大部分。最后对所设计的力促动器控制系统的可靠性和有效性进行了实验验证。
1 力促动器控制系统
1.1 系统设计方案
空间望远镜系统中常用的力促动器主要有机电式、液压式和气动式三种[11]。液压式力促动器输出力大,减速比高,但实际操作过程中存在液体泄漏造成主镜污染的危险。气动式力促动器结构简单,无污染,速度快,但控制复杂,低速稳定性差。机电式力促动器响应速度快,控制精度高,但易受电源电压、频率变化的影响。结合实际情况和项目实验要求,本文采用了电机+丝杆的机电式力促动器结构。
本文设计的力促动器控制系统包括机械传动机构、驱动控制系统和反馈环节三大部分。图1为力促动器控制系统组成结构。机械传动结构主要由减速器、联轴节、螺母丝杠、导向装置等组成。驱动控制系统包括直流电机、驱动器和控制软件。力传感器与编码器实现反馈控制。

图1 力促动器控制系统组成结构
图2为力促动器系统硬件实验环境。直流电机采用MAXON公司的型号为EC-I 40系列的无刷直流电机;编码器为1024线增量式编码器;采集卡为NI公司的型号为NITB4330,集成24bitA/D,转换范围±25mV,力的分辨率为0.15mN/bit;驱动器采用MAXON公司的型号为EPOS2 24/5的驱动器;力传感器采用HBN公司的型号为S9M,测量范围±500N,分辨率0.02mV/N;NI半实物仿真平台负责力的采集、上位机软件编程实现、力闭环控制算法实现,与电机驱动器进行通信。

图2 力促动器硬件实验环境
1.2 控制器设计原理
图3为控制器原理图。fd表示控制系统给定的力值,xd表示内环给定的位移,x表示内环输出的位移,f表示力促动器控制系统输出的外力,G1(s)表示外环力环控制器的传递函数,G2(s)表示内环位置环控制器的传递函数,G3(s)表示执行器的传递函数,G4(s)表示传动机构的传递函数。

图3 控制器设计原理图
由于力促动器控制系统设计时,内环带宽可以设计为远大于外环带宽,因此在恰当设计内环位置环控制器G2(s)后,在带宽低频范围内,可以认为xd等于x,上图等效为图4。
恰当设计力环控制器G1(s),即可保证t→∞,f→fd,即力促动器控制系统输出力值趋近于给定力值。

图4 控制器设计简化图
1.3 系统工作原理
本系统采用了外环力环与内环位移环控制方法,其对应的力环控制器与位置环控制器均由上位机软件实现。
系统工作时,上位机接收到主镜面形校正所需的期望值,力环控制器将期望值与力传感器反馈的测量值进行比较,经控制算法校正处理后,发送控制信号至位置环控制器。位置环控制器对接收到的控制信号与编码器输出的旋转角度信号进行比较,经控制算法校正处理后,发送控制信号至电机驱动器,电机驱动器输出驱动电压信号控制直流电机旋转。电机作为执行机构,主要提供旋转扭力,通过联轴节驱动减速器带动精密丝杠转动,丝杠将旋转运动转换为螺母的直线运动,产生直线方向的拉力或者压力。与此同时,上位机软件平台实时显示力传感器反馈的校正力测量值,并对测量值进行存储。
2 软件设计
2.1 PID控制算法
PID控制算法可靠性高、算法简单、鲁棒性好、参数整定方便,广泛应用于工程实际中。PID控制算法根据给定值与实际输出值构成偏差值,将偏差值的比例、积分和微分通过线性组合构成控制量,对控制对象进行控制。
PID算法表达式为:

式中,Kp为比例系数,TI为积分时间常数,TD为微分时间常数,u(t)为输出的控制量,e(t)为偏差信号。
工程上PID参数的整定方法主要有临界比例度法、过渡过程响应法、试凑法等。本文采用试凑法来确定PID参数,通过控制系统的闭环测试结果,反复调节PID参数,来确定最终参数值。经过反复实验,得到位置环参数为P位=2.5、I位=0、D位=0.5,力环参数为P力=3、I力=0.35、D力=0,此时控制精度较理想。
2.2 软件设计
软件设计时,要满足以下三方面的需求:
(1)稳定性需求:要求软件系统在工作时具有稳定性,在控制系统发生故障和校正力测量值超出阈值时,能够及时、可靠的处理,使控制系统快速恢复到正常状态,确保实验环境安全可靠。
(2)实时性需求:校正力期望值发送后,及时接收校正力测量值,期望值与测量值经过控制算法处理后,输出控制信号,整个过程要保证实时性。
(3)扩展性需求:随着项目要求的变化,软件系统后期可能需要进行相应的修改和完善,例如增加新的功能模块、控制算法的更改,因此,软件设计上要考虑方便进行修改和维护的需求。
软件设计基于LabWindows语言,图5为上位机界面。用户界面包括力信号采集通道选择、采样频率设置、采集卡参数设置、力传感器参数设置、校正力期望值读入、校正力测量值保存、数据显示、力促动器位移与力值上升时间测量等。
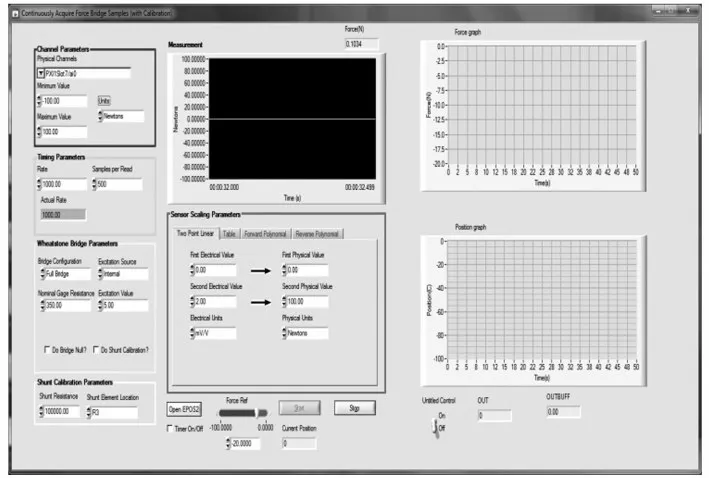
图5 上位机界面
图6为一个执行周期的系统软件流程图,系统上电后,初始化配置,设置系统定时中断,中断到来时,根据力给定值和测量值计算力控制误差,若误差大于零,电机正转,如误差小于零,电机反转,力控制算法对误差进行校正。

图6 软件流程图
3 力促动器性能测试
为了验证所设计的力促动器控制系统性能,进行了一系列测试,主要包括开环线性度测试、力稳态精度测试、控制系统抗干扰能力测试,以及系统阶跃响应测试。
3.1 线性度测试
在±200N测量行程内,测试系统开环状态下,系统输出的线性度。上位机发送位移指令,力传感器反馈输出力值。测试结果如图7所示。由图7可知,在测试范围内,系统输出是线性的。
3.2 力稳态精度测试
表1为系统闭环状态下,一组力稳态精度测试结果。经多次测试,结果表明±50N输出力范围内,力的稳态精度优于50mN,均方根误差为0.0298N。
3.3 抗干扰能力测试
力促动器不仅要准确地输出指定的力值,还要具有良好的抗干扰能力,力促动器系统的稳定性关系到整个主动光学系统稳定性。
当力促动器的输出力稳定时,对其施加外力进行干扰。图8所示是压力为10N时的抗干扰试验结果。从力变化曲线可以看出,力促动器未出现振荡等不稳定的情况,系统能够有效克服外界干扰,快速恢复到稳定值,使输出力保持稳定。

图8 抗干扰测试结果
3.4 系统阶跃响应测试
在初值为0时,分别进行了1N和10N的阶跃响应测试,测试结果如图9和图10所示。结果表明,输出力上升时间均在3s之内,并且系统超调量很小。

图9 输出1N力值时阶跃响应测试
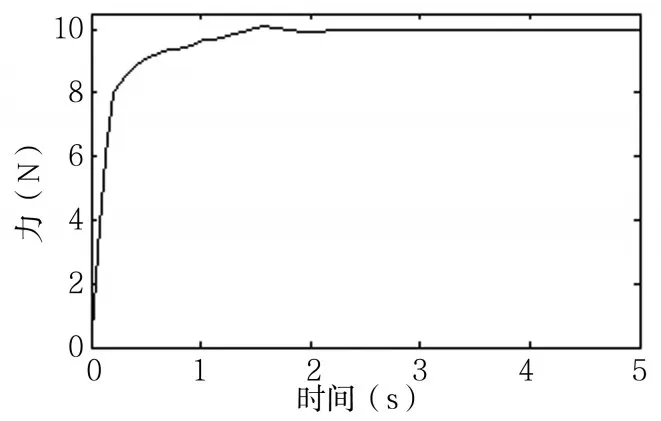
图10 输出10N力值时阶跃响应测试
4 结论
本文设计了基于上位机软件的空间望远镜主镜力促动器控制系统。控制策略为基于PID控制算法的力与位移双闭环控制,由LabWindows软件实现。测试结果表明,在±200N测量行程内,该系统具有良好的线性度和响应特性,稳态精度优于0.05 N,系统抗干扰能力强,满足项目对主镜力促动器控制系统的要求。
参考文献
[1] Wolf E.Progress in optics[M].Elsevier Press,2002.
[2] Gerard T B.The scaling relationship between telescope cost and aperture size for very large telescopes[J].SPIE,2004(5489):563-568.
[3] 戴晓霖,鲜浩,唐金龙,等.8m能动薄主镜侧支撑设计[J].光学学报,2015,35(6):622004-1-622004-6.
[4] 胡佳宁,董吉洪,周平伟.地基大口径望远镜主镜主动支撑系统综述[J].激光与红外,2017,47(1):5-12.
[5] 李剑锋,吴小霞,邵亮.大口径SiC主镜主动支撑研究及促动器设计[J].红外与激光工程,2016,45(7):13-18.
[6] 余正洋,李国平.用于主动光学的气体力促动器设计[J].液压与气动,2011(1):80-85.
[7] 彭尧,张景旭,杨飞,等.基于主动光学的大口径反射镜硬点定位技术[J].激光与红外,2016,46(2):139-144.
[8] Richard Bennett,Fred Baine.Active Mirror Support Using Pneumatic Actuators[J].SPIE,2004(5497):91-102.
[9] 张丽敏,张斌,杨飞,等.主动光学系统力促动器的设计和测试[J].光学精密工程,2012,20(1):38-44.
[10] 吴小霞,李剑锋,宋淑梅,等.4mSiC轻量化主镜的主动支撑系统[J].光学精密工程,2014,22(9):2451-2457.
[11] 李国平,苗新利.一种微位移促动器的设计和检测[J].光学精密工程,2005,13(3):332-338.