一种高速跳频通信系统发射功率自动控制方法*
2018-05-25赵敏丞
陆 阳,赵敏丞
(中国电子科技集团公司第二十研究所,陕西 西安 710068)
0 引 言
在未来的高技术战争中,复杂的电磁环境及全面的电子战、信息战将成为常态。如何在这样的环境中保持通信系统正常工作并减小无线信号被敌方侦测、截获的几率,是每一个军用通信系统必须考虑的问题。当前,采用高速跳频技术和精确控制发射功率成为一种行之有效的手段。受制于现有元器件和电路加工工艺,功放电路的增益及输出功率存在明显的个体差异,且随工作温度、工作频率的改变而发生改变。在跳频工作模式下,功放输出功率的最大值和最小值有时会相差3 dB甚至更多。当最小功率频点满足通信距离时,最大功率频点往往已经被敌人探测到。除了电子战方面的优势外,更高的发射功率平坦度会为接收方提供更好的接收条件,降低对接收机接收动态范围、自动增益控制的要求。因此,在射频领域,工程师们一直致力于提高大功率功放电路在全工作温度范围和全工作频段内的输出平坦度,特别是希望减小高速跳频发射时的功率波动,但结果往往并不理想。本文将从另一个角度,即数字自动控制的角度阐述一个全新的方法。
1 数控调节功放输出功率的方法
目前,现役的军用通信系统大部分不具有输出功率调节能力,或仅能够设置大小功率模式,无法进行精细化调节。部分新研或在研装备特别是综合化通信装备,正尝试以数控方式进行输出功率调节。目前,常用的方式主要分为两种。
一是通过程控衰减器对前级激励信号进行衰减,从而间接减小末级输出功率。这种调节方式的优点是原理简单、易于操作,缺点是受限于数控衰减器的控制精度和切换时间,无法进行连续调节和精确调节,特别是无法对射频脉冲信号进行幅度调制。
二是通过软件算法产生数字调制信号,再通过数模转换器件(DAC)将数字调制信号转化为模拟幅度调制信号。之后,通过电压和电流放大并输入功放电路,以此连续调制射频信号的幅度。
外军最新的机载通信导航识别系统[1]采用综合化设计,集成了航管应答机(ATC)[2]、敌我识别系统[3]、精密测距设备(DME/P)[4]、塔康(TACAN)[5-6]和联合战术信息分发系统(JTIDS)[7]等功能。各功能共用一台功放,需要针对各功能调节不同的发射功率,尤其是DME/P及TACAN功能,需要对射频脉冲信号进行幅度调制。实践中采用软件算法产生数字调制信号,经DAC产生0~3.3 V的调制信号,再通过多级三极管进行电压放大及一级NMOS器件完成调制信号电流放大。功放电路采用Si LDMOS器件,采取甲乙类漏极调制工作方式,以调制信号调整漏极脉冲电压,进而连续控制输出功率,完成DME/P及TACAN信号的幅度调制。参考电路如图1所示。

图1 脉冲调制功放参考电路
参考电路中,射频信号由Pi输入,经A1、A2、A3和A4共4级放大后由Po端输出。其中,A1、A2和A3采用固定增益放大,A4级的放大增益受调制信号控制。TTL端输入发射门控信号,而0~3.3 V端输入DAC产生的调制信号。在Po端后,还可以加入固定增益放大电路,以进一步提高输出功率。采用此种调节方式,控制精度将完全取决于调制信号本身能够达到的精度。
2 调制信号产生电路
调制信号产生电路主要包含处理器、数模转换电路、功率检波及采样电路等,功能框图如图2所示。
处理器主要负责执行相应算法对数字信号进行处理,包括调制信号产生算法、调制信号的自动修正等。数模转换电路主要负责将数字信号转化为模拟调制信号。功率检波及采样电路负责对发射信号的功率进行采样记录,成为调制信号自动修正算法的重要输入参数。

图2 调制信号产生电路原理
在生产过程中,电路由于器件个体差异及加工工艺限制,会出现实际指标与设计值存在一定差异。因此,需要对电路进行标定,而标定结果将成为使用过程中发射功率自动控制算法的依据。在生产调试过程中的标定称为初始标定。初始标定过程主要包含功率检波标定和发射增益标定。标定过程由上位机标定工具软件自动执行,具体标定流程如下:
(1)通过射频输入端口向功率放大电路输入待标定频点功率为标准值的射频信号,同时通过通信总线将频点号发送给处理器;
(2)处理器根据通信信号脉冲特征,通过DAC连续输出正三角波或幅度不同的方波脉冲调制信号;
(3)处理器通过DAC连续读取检波信号幅度值;
(4)射频输出端口连接功率计,实时监测输出功率,并将测试值通过通信总线实时传递给处理器;
(5)处理器将工作频点、工作温度、DAC输入值及其对应的ADC输出值、功率计测得的发射功率记录,在处理器内部非已失存储器中形成初始标定结果;
(6)如果有必要,可以调整射频输入功率重复以上流程,并将输入功率值一并记录到标定结果;
(7)根据以上流程,完成所有频点的标定工作。
3 高速跳频工作时的功率自动修正
3.1 调制信号生成算法
系统工作时,遵循以下步骤产生调制信号:
(1)根据当前工作频率、通信距离、天线增益、对方接收灵敏度、频谱感知数据和气象条件等多重因素,计算所需要的最低发射功率,同时留出适当余量应对水蒸气损耗、降雨损耗和多径干扰损耗等不易精确量化计算的功率损失,最终得出所需的发射功率;
(2)根据发射功率和发射信号的幅度调制要求,计算所需的射频信号包络曲线;
(3)上位机通过通信总线提前将未来一段时间使用的跳频图样发送给处理器。当系统采用加密的伪随机序列跳频图样时,上位机提前将加密过的伪随机序列生成种子发送给处理器,然后处理器通过种子计算出跳频图样。以发射开关信号作为频率切换信号,结合跳频图样确定工作频点。
(4)根据工作频率、工作温度和射频信号包络曲线,从标定数据中查找、计算所对应的DAC数据,并发送给DAC产生调制信号;
(5)当系统切换至新的工作频点时,以发射门控信号为界,处理器重新查找新的DAC数据。
通过以上过程,即使功率放大电路在不同工作频点下的发射增益特性不同,由于受到不同发射频点的调制脉冲控制,即使高速跳频仍可以保证不同频点的发射功率一致。
3.2 调制信号的自动修正
在功放电路工作过程中,由于环境温度的不断改变和功放电路自身产生的热量,功放电路的工作温度不断改变。工作温度的改变会直接影响功放电路的幅频特性曲线和功放的增益、饱和功率和1 dB压缩点等参数。同时,在功放长期使用后,必然会产生老化现象。受匹配电路等的影响,这种老化产生的影响也不尽相同,不能一概而论。因此,功放必须具有自动修正的能力,具体过程如下:
(1)通信系统开始工作时,从存储器中读取初始标定数据放入内存中形成当前标定数据。
(2)读取当前功放中功率器件附近的温度,利用当前标定数据、当前温度以及功放电路的典型温度特性曲线,对当前标定数据进行上电后的第一次修正。如果需要在通信系统开机时便保证射频隐身性能,则需要在第一次修正时将发射功率尽可能调低。虽然调低发射功率有可能会延长后续自动修正过程所需的时间,但这样做可以保证不会有功率过高的信号被发出,从而避免被敌方侦测到。
(3)当通信系统开始发射信号时,处理器可以通过计算伪随机序列得到当前的工作频点。从当前标定数据中读取调制信号数据,并通过DAC产生模拟调制信号,同时通过ADC获得当前功率检波数据。
(4)通过比较当前功率检波数据与初始标定数据中理想功率下的检波数据,可以得知当前调制数据是否准确。当一段时间内同一频点ADC数据平均值大于初始标定数据中的理想值时,减小调制信号数据;反之,则增大调制信号数据。
功放的工作温度变化和功放老化是一个相对缓慢的过程,而高速跳频系统频率切换速率往往为每秒数万跳且为伪随机序列。功放持续工作过程中,可通过实时维护功放各频点调制数据,使发射信号功率保持在理想状态。
4 某型通信系统功放验证数据
某型通信系统样机在生产加工完毕后,对功放进行了测试。其中,各工作频点调制数据全部相同,同时关闭了自动控制功能。它的发射功率曲线如图3所示。
该样机设计发射功率为57±0.5 dBm。未进行自动控制时,实际发射功率最低为56 dBm,而最大发射功率达到了59.6 dBm,显然不符合设计指标。通过对样机进行初始标定和开启自动控制功能后,当功放工作在伪随机序列高速跳频模式时,测得功放实际发射脉冲功率结果如图4所示。可以看到,发射功率已经控制在57 dBm附近,完全达到了预期的设计目标。
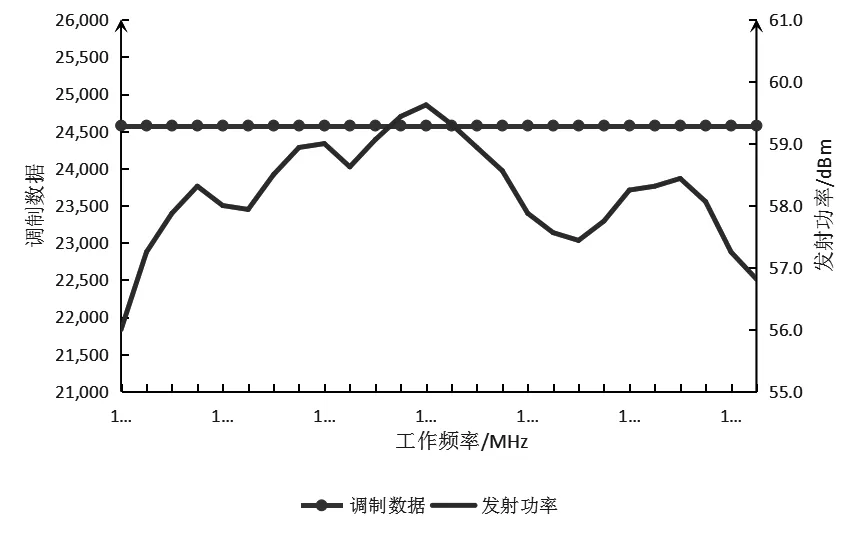
图3 未进行自动控制时的发射功率曲线
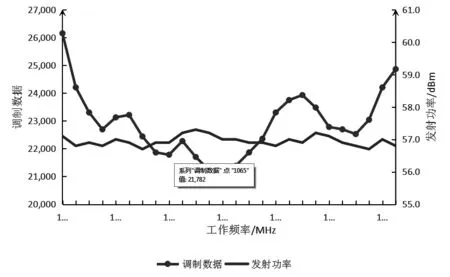
图4 进行自动控制后的发射功率曲线
5 结 语
本文介绍的自动控制方法可以在很大程度上将功放发射功率控制在理想范围内。特别是针对高速跳频系统中不同工作频点间的放大增益进行调节,改善功放的幅频特性,是一般系统无法做到的。
目前,功率控制精度主要受限于检波器的精度。虽然已经通过测量功放工作温度并对ADC采样数据进行了一定处理,但仍然无法完全修正检波器工作参数变化造成的影响。随着ADC器件和数字信号处理器件的进步,在成本可控的前提下,可以改用宽带ADC器件直接采样射频信号,并提取射频信号幅度信息,以进一步提升自动控制精度。
参考文献:
[1] 何进.国外L频段航空电子设备电磁兼容设计分析及启示[J].现代电子技术,2010(03):23-28.HE Jin.Analysis and Enlightenment of Electromagnetic Compatibility Design of Foreign L-band Avionics Equipment[J].Modern Electronic Technique,2010(03):23-28.
[2] 黎廷璋.空中交通管制机载应答机[M].北京:国防工业出版社,1992.LI Ting-zhang.Air Traffic Control Airborne Transponder[M].Beijing:National Defense Industry Press,1992.
[3] 钱眺,茅玉龙,查荣.IFF信号的分析与识别研究[J].雷达与对抗 ,2008(03):54.QIAN Tiao,MAO Yu-long,ZHA Rong.Analysis and Recognition of the IFF Signal[J].Radar and Countermeasure,2008(03):54.
[4] 周其焕.微波着陆系统[M].北京:国防工业出版社,1992.ZHOU Qi-huan.Microwave Landing System[M].Beijing:National Defense Industry Press,1992.
[5] 干国强.导航与定位(现代战争的北斗星)[M].北京:国防工业出版社,2000.GAN Guo-qiang.Navigation and Positioning(the Dipper of Modern War)[M].Beijing:National Defense Industry Press,2000.
[6] 谭忠吉,石宇,史彦斌.机载某型塔康设备特性研究[J].吉林大学学报(信息科学版),2004,42(02):115-118.TAN Zhong-ji,SHI Yu,SHI Yan-bin.A Certain Type of Airborne TACAN Equipment Characteristic Research[J].Journal of Jilin University(Information Science Edition),2004,42(02):115-118.
[7] 蔡晓霞,陈红,郭建蓬等.JTIDS信号对抗技术研究[J].航天电子对抗,2004(04):47-51.CAI Xiao-xia,CHEN Hong,GUO Jian-peng,et al.Research on JTIDS Signal Countermeasures[J].Space Electronic Countermeasures,2004(04):47-51.
