助行器的控制系统设计
2018-05-24常镭民
常镭民
(山西机电职业技术学院,山西 长治 046011)
0 引言
助行器是能够让人们穿戴行走的人机一体化装置,它将人类和两足机器人结合在一起,并利用智能的数字系统来控制机械装置,促使下肢瘫痪者正常行走。目前大多国内外研究的助行器的单腿只在髋关节、膝关节处安装驱动装置[1],使得穿戴助行器者关节活动单一,且受到限制。为了解决当前研究中的不足,本文提出了助行器控制系统中的多轴协同运动控制,并设计了扩展性能好、驱动能力强的控制系统。
1 助行器动力学分析
通过对人体腿部模型分析,建立助行器机械结构的三维模型,然后对模型进行动力学分析,为助行器智能控制系统的设计提供相对应的支撑,使下肢瘫痪者在穿戴助行器时可以达到正常人实际行走的效果。
人体腿部可以被抽象地视为平面三连杆机构[2],故建立的助行器模型如图1所示,在此助行器机械结构模型的基础上建立拉格朗日方程。
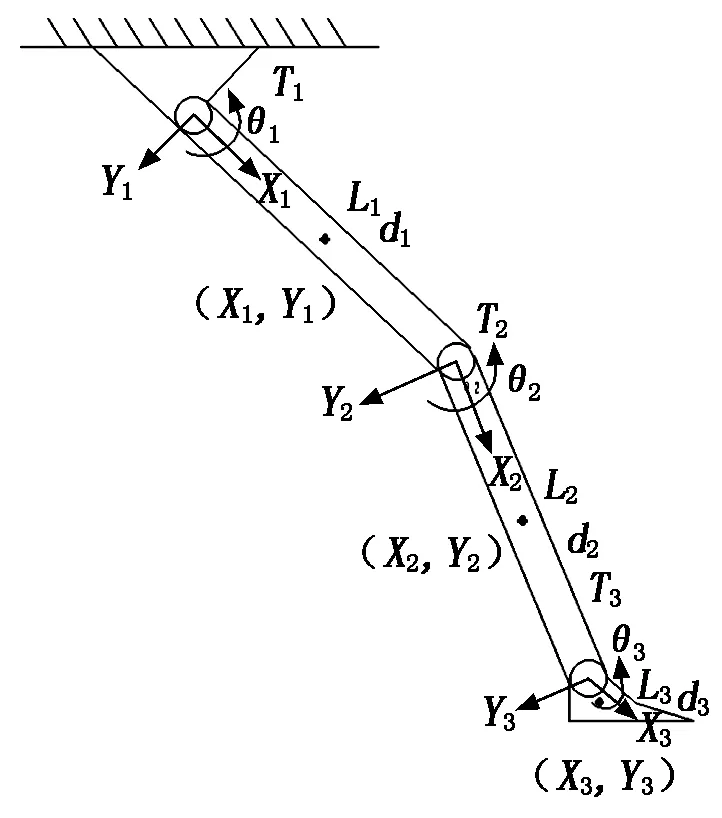
图1 助行器模型
在图1中,各关节的连杆长度为L1、L2和L3,质量为M1、M2和M3,转矩为T1、T2和T3;本文把连杆质量都视为集中在各杆的重心上,d1、d2和d3为各连杆重心的位置,其广义坐标(各连杆的角度)为θ1、θ2和θ3,定义正方向为逆时针。该模型视为由质点M1、M2和M3组成的质点系,构建的动力学方程为:
其中:Dii为第i(1,2,3)关节的等效转动惯量;Dij为关节i(1,2,3)和关节j(1,2,3)的耦合转动惯量;Dijj为向心力系数;Diik、Dijk为科氏力系数;Di为关节i重力系数;Q1为髋关节力矩;Q2为膝关节力矩;Q3为踝关节力矩。
按照GB10000—88中国正常成年人体尺寸国家标准,在此次助行器模型中,选取正常成年男子18岁~60岁年龄中的人体百分位中的第五十百分位数据作为参考依据,助行器模型的参数如表1所示。
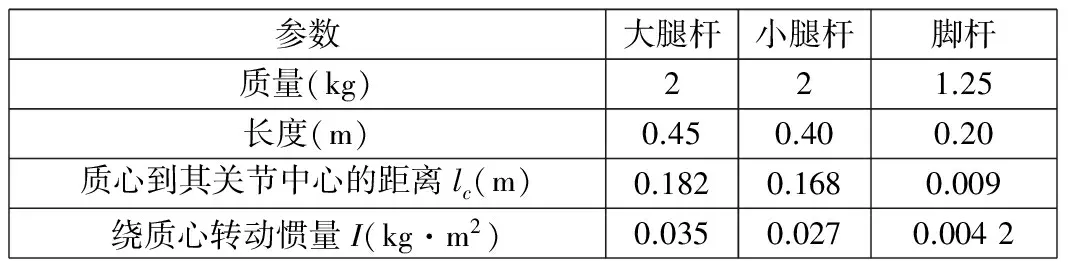
表1 助行器模型参数
助行器智能控制系统首先是以LD3 Hall Effect型电动推杆输出推力作为已知条件,将电动推杆不同值的推力输入到助行器的力—位置闭环控制系统,仿真得出各关节的运动角度,并与在VICON系统平台得到的正常人体行走时腿部各关节的运动角度做比较。把上述的人体腿部模型看成被控制机构,当助行器模型各关节的输出推力经过控制器后,进行科氏力和重力的补偿,最后助行器模型输出各关节角度模拟曲线。
通过建立动力学方程组,利用软件MATLAB中的Simulink模块搭建助行器智能控制系统仿真模型,以此来研究人体关节模型的角度。
当髋关节处的电动推杆输出推力F=600 N时,仿真结果如图2所示;当膝关节处的电动推杆输出推力为F=300 N时,仿真结果如图3所示;当踝关节的电动推杆的输出推力为F=150 N时,仿真结果如图4所示;且满足以上条件时,助行器模型各关节的运动角度模拟曲线与正常人体运动时各关节运动角度曲线比较时,产生的误差最小。

图2髋关节的角度追踪仿真曲线图3膝关节的角度追踪仿真曲线图4踝关节的角度追踪仿真曲线
2 助行器控制系统的设计
助行器控制系统的设计包括硬件设计和软件设计。硬件设计是建立助行器智能控制系统的基础,属于智能控制系统的底层结构。
助行器的控制目标是使穿戴助行器的下肢瘫痪者可以象正常人一样行走[3]。为了使穿戴助行器的人可以按照规定轨迹来实现行走功能,设计的助行器智能控制系统由一个作为主机的ATmega128单片机和两个作为从机的ATmega128单片机组成,主机和从机通过TWI总线通信,然后通过ATmega128单片机(从机)再分别对助行器各关节的电动推杆进行控制,如图5所示。

图5 助行器总体控制方案
正常人体的单腿包含5个自由度,但考虑硬件的实际驱动能力,本文按照助行器单腿模型3个自由度设计,助行器单腿的关节模型包含3个LD3 Hall Effect电动推杆和3个与其相对应的霍尔传感器元件。一个型号为LD3 Hall Effect电动推杆的控制端口需2个I/O端口,而与其相对应的霍尔传感器元件的控制端需5个I/O端口,对于建立的单腿模型控制各关节电动推杆就需要单片机21个I/O端口,再加上电源I/O端口以及人机界面按键的I/O端口等,一个单片机的I/O端口是不能满足条件的,所以本文使用3个型号相同的单片机,PC机和单片机(主机)之间采用USART异步串行通信方式,单片机(从机)与单片机(主机)间采用TWI总线的通信方式,以此来接收PC上位机已验证过的程序然后传达到各关节的动力机构。
3 结语
本设计将模块化和功能分解的思想应用到动力式助行器的控制系统设计中,且通过ATmega128单片机的TWI总线通信控制多自由度协同运动,从而解决了智能控制器I/O端口不足的问题,同时也利用助行器智能控制系统硬件系统和软件资源,实现了3个ATmega128单片机之间通过TWI总线通信,从而实现了对多自由度机械结构的协同运动控制。
参考文献:
[1] 刘志娟.多自由度下肢外骨骼控制系统研究[D].杭州:浙江大学,2011:1-18.
[2] 杨喜飞.助力式下肢外骨骼机构设计与分析[D].天津:天津科技大学,2012:28.
[3] 常镭民.动力式助行器的控制系统设计[D].天津:天津科技大学, 2013:14-15.
