电动汽车充电机谐波特性分析及抑制
2018-05-24赵强松
梁 芬,赵强松
(1.中原工学院 信息商务学院,河南 郑州 450007; 2.中原工学院 电子信息学院,河南 郑州 450007; 3.南京航空航天大学 自动化学院,江苏 南京 210016)
0 引言
随着能源危机和环境污染的加剧,如何高效、清洁地利用能源变得尤为重要,电动汽车是新能源汽车工业发展的重要方向之一[1],作为电网与电动汽车接口的充电站是电动汽车的重要配套设施。充电站中的充电机为非线性设备,在充电过程中会产生大量的谐波电流,对智能电网造成很大的危害[2]。因此,对充电机谐波特性及抑制方法的研究对今后大规模充电站的建设、提高电网质量等具有重要意义。
在对充电机谐波抑制的方法和措施上,目前多采用十二脉整流、有源电力滤波以及PWM整流等方法[3-5];在入网电流控制方法上,传统PI控制操作简单、易于被广泛采用,为了提高系统的控制精度,文献[6]采用准PR控制,文献[7]采用基于空间矢量的滞环控制方法等,但这都在一定程度上增加了控制器的复杂度。本文搭建了LCL结构PWM整流充电机仿真模型,通过选取合适的PI参数,降低了网侧电流的总畸变率THD,且系统具有良好的动态特性。
1 LCL结构PWM整流充电机拓扑结构与数学模型
LCL结构三相电压型PWM整流充电机主电路拓扑结构图如图1所示,其中ea、eb、ec为电网侧三相电压,电网侧电感和整流器侧电感分别为Lg、L,直流侧电流和负载电流分别为id和iL,ud为直流侧电压,C为直流侧滤波电容,Cf为交流侧滤波电容,电容电流分别为ica、icb、icc,iga、igb、igc分别为网侧三相电流,六个IGBT组成三相桥式整流电路,整流器侧电流分别为i2a、i2b、i2c,整流器三相控制电压分别为ua、ub、uc。
以单相PWM整流充电机为例,忽略电感内阻,根据图1可得出LCL结构的PWM整流充电机中网侧电流Ig(s)与整流器控制电压U(s)的传递函数为:
(1)

图1 LCL结构PWM整流充电机拓扑图
由于LCL系统中存在谐振极点而不稳定,若采用无源阻尼抑制[8],设交流侧滤波电容Cf上串联三相电阻Rc,忽略电感内阻,网侧电流Ig(s)与整流器控制电压U(s)传递函数为:

(2)
取式(1)和式(2)中各参数分别为:Lg=3 mH,L=2.6 mH,Cf=10 μF,Rc=10 Ω,采用无源阻尼前后的伯德图如图2所示。显然,采用无源阻尼后系统谐振点频率处增益明显降低。
2 充电机模型中谐波分析
充电站中的谐波主要来源有:①电网背景谐波;②PWM整流装置中PWM死区产生开关频率整数倍谐波,这些谐波扰动信号是周期的。文中采用LCL结构的PWM整流充电机模型能很好地抑制电网中存在的高次谐波,但在实际电网电压中仍然含有很多低阶次谐波,如含有大量的工频整数倍谐波[9-10],在该频率区域内,系统开环增益较低,降低了低频处系统谐波抑制能力。
大量实验和研究结果表明:对于现阶段广泛采用的三相不可控桥式6脉动整流充电机,以网侧电流A相为例,进行傅里叶分解[11],得:
(3)
其中:ω为电流角频率;I1为基波电流有效值;In为谐波电流有效值。
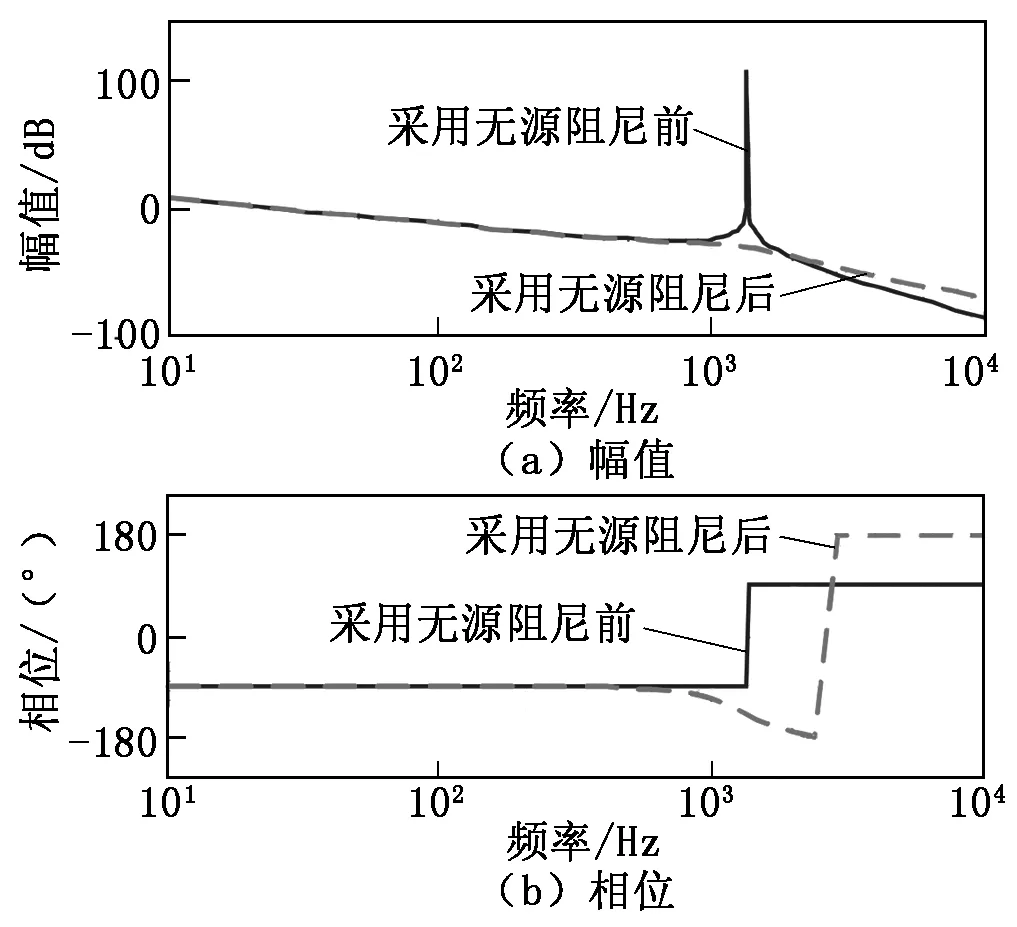
图2 采用无源阻尼前后控制系统bode图
可见,对于三相桥式不控整流充电机,其谐波电流次数主要是5次、7次、11次、13次等;谐波电流大小与谐波次数成反比,谐波的次数越大,谐波电流值越小。并且在充电机一个充电周期内,谐波的幅值随着充电时间发生变化,其变化规律如图3所示。

图3 三相桥式不控整流充电机谐波变化规律
3 PWM整流器控制
整流电路的控制目的是实现网侧电流正弦化,且与输入电网电压同相位,从而获得单位功率因数;系统的直流电压输出稳定,且动态响应快,稳态误差小;能量可在交直流两侧流动,系统能够四象限运行。对于单相PWM整流器常采用的控制方法有网侧电流控制、直流侧电压控制等,其中直接电流控制多采用直流侧电压外环、网侧电流内环的双闭环策略,其动态响应速度快、稳态控制精度高、鲁棒性好,被广泛应用[12-13]。本文采用的矢量控制属于基于电压定向的直接电流控制,其控制结构如图4所示,其中GLCL(s)为网侧电流ig(s)与整流器控制电压u(s)的传递函数,GPI(s)为PI控制器传递函数,iref为参考电流,ug为电网电压,ig为电网电流,E(s)为误差信号。
取采样频率为10 kHz,参考信号频率为50 Hz,根据参考文献[14]取比例积分系数Kp=5,Ki=14 000,系统的开环bode图如图5所示,其中GLCL(ejω)为PWM整流充电机开环传递函数,GPI(ejω)×GLCL(ejω)为PI控制系统开环传递函数,根据图5可知,该参数能满足系统稳定性的要求。
4 仿真验证
在MATLAB/Simulink环境下搭建单相PWM整流充电机仿真模型,PWM整流充电机网侧电感、整流器侧电感、无源阻尼电阻的参数设置与上述相同,其余参数设置如表1所示。
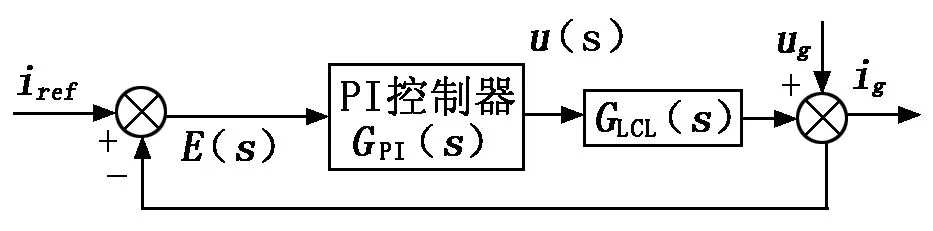
图4 控制系统结构图
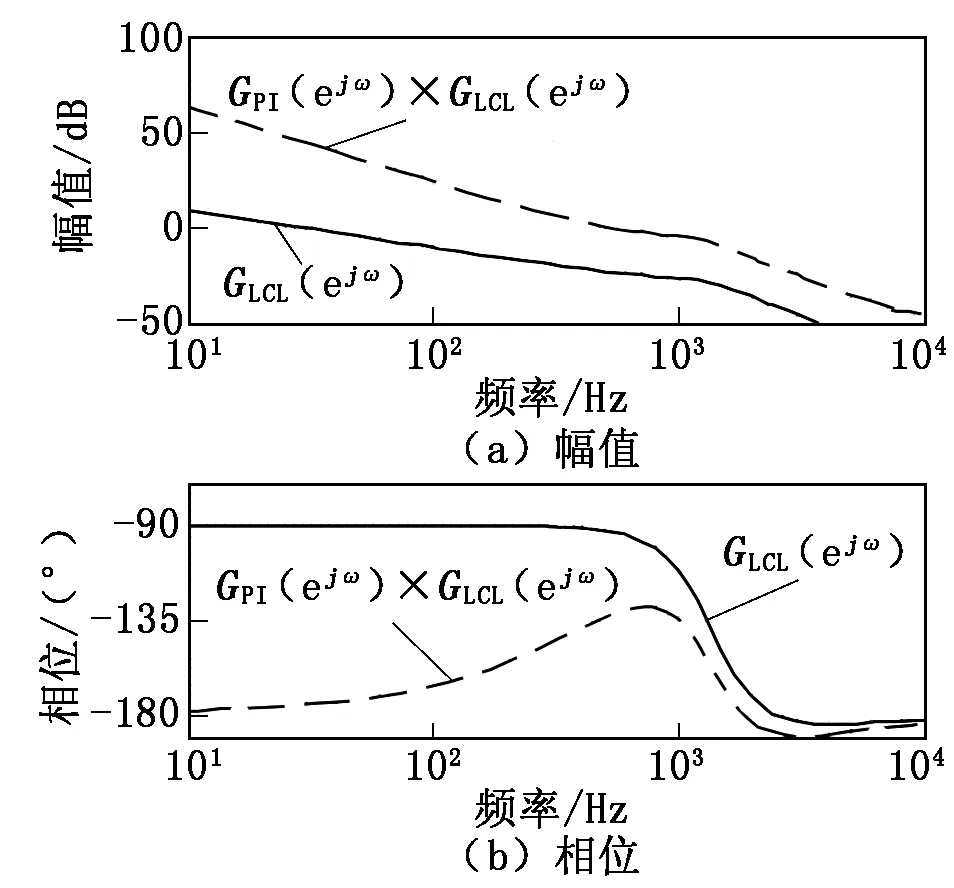
图5 PI控制系统的开环bode图
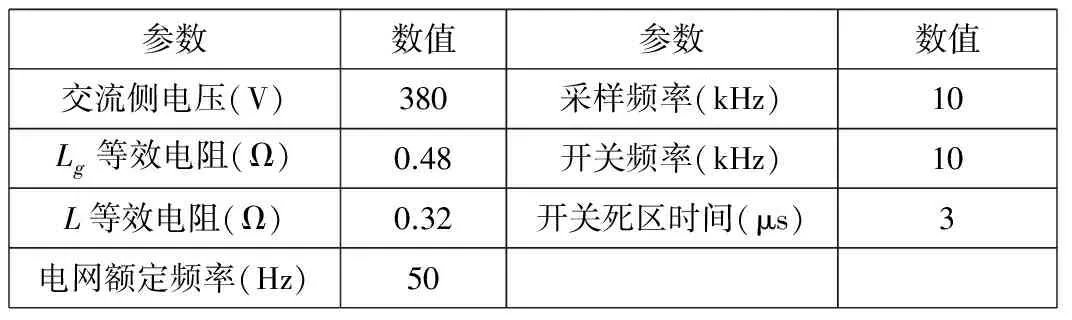
参数数值参数数值交流侧电压(V)380采样频率(kHz)10Lg等效电阻(Ω)0.48开关频率(kHz)10L等效电阻(Ω)0.32开关死区时间(μs)3电网额定频率(Hz)50
以9 kW单台充电机为例,当充电时间t=90 min时,对应的网侧电流谐波含量仿真图如图6(a)所示[15];图6(b)为采用PI控制后网侧电流谐波含量频谱分析。
可见,采用PI控制方案网侧电流3次、5次、7次、11次等奇次谐波明显减小,谐波电流总畸变率THD从21.73%下降到3.58%。

图6 网侧电流谐波频谱分析
5 结语
本文建立了LCL结构PWM整流充电机数学模型,并对其电网侧电流谐波特性进行分析,搭建了LCL结构PWM整流充电机仿真模型,通过选取合适的PI参数,降低了网侧电流的THD,对网侧电流指定次谐波有良好的抑制作用。
参考文献:
[1] Albert G Boulanger,AndrewC Chu,SuzanneMaxx,et al.Vehicle electrification: status and issues[J].Proceedings of the IEEE,2011,99(6):1116-1138.
[2] 卢艳霞,张秀敏,浦孝文.电动汽车充电站谐波分析[J].电力系统及其自动化学报,2006,18(3):51-54.
[3] 李璨.基于Y/Y与Y/变压器的电动汽车充电站的谐波抑制方法[J].电力科学与技术学报,2014,29(2):82-88.
[4] 杜学龙,刘志珍,王建,等.电动汽车充电站谐波抑制方法的对比分析[J].电力系统保护与控制,2012,40(19):139-149.
[5] 胡泽春,宋永华,徐智威,等.电动汽车接入电网的影响与利用[J].中国电机工程学报,2012,32(4):1-10.
[6] 曹以龙,黄锦,赵转.电动汽车充电机中PWM整流器的性能研究[J].电测与仪表,2016,53(2):102-107.
[7] 刘国海,魏明洋,陈兆岭.电动汽车充电机谐波抑制工作机理的研究[J].电力电子技术,2011,45(12):11-13.
[8] 王海松,王晗,张建文,等.LCL型并网逆变器的分裂电容无源阻尼控制[J].电网技术,2014,38(4):895-902.
[9] 王斯然,吕征宇.LCL型并网逆变器中重复控制方法研究[J].中国电机工程学报,2010,30(27):69-75.
[10] 鲍陈磊,阮新波,王学华,等.基于PI调节器和电容电流反馈有源阻尼的LCL型并网逆变器闭环参数设计[J].中国电机工程学报,2012,32(25):133-142.
[11] 胡婷,刘观起,韩笑.基于APF的电动汽车充电站谐波治理措施研究[J].电网与清洁能源,2013,29(7):99-104.
[12] 肖汉.单相PWM整流器矢量控制的研究[D].广州:广东工业大学,2010:3-5.
[13] 郭伟,王跃,王兆安,等.应用于电动汽车充电站的PWM整流器控制方法[J].电工技术学报,2012,27(2):153-158.
[14] 赵强松,叶永强,徐国峰.分布式发电系统中并网逆变器的新型有源阻尼策略[J].电力系统自动化,2015(14):140-144.
[15] 吴凯,程启明,白园飞,等.电动汽车充电机的谐波分析与治理[J].电源技术,2014,38(9):1720-1722.
