擦窗机起升冲击载荷的分析与计算
2018-05-24宣敏浩任仲贺谢家学
宣敏浩,任仲贺,何 帆,谢家学
(1.无锡市滨湖区太湖街道科学技术协会,江苏 无锡 214121;2.江南大学机械工程学院,江苏 无锡 214122;3.无锡雄宇集团吊蓝机械制造有限公司,江苏 无锡 214125)
擦窗机是一种用于对高层建筑外墙进行清洗与维护的专用设备[1]。随着我国经济的高速发展,高层建筑的数量和样式越来越多,对擦窗机的需求量也在持续增长,并且对擦窗机稳定性与可靠性的要求也越来越高[2、3]。
擦窗机在运作过程中,经常遇到起吊和空中制动的情况[4],吊物将会形成冲击载荷。目前,国内外擦窗机伸缩臂结构设计的计算一般是把动态问题简化为静态问题进行处理,以动载系数的形式考虑其在工作时所受的冲击载荷作用,即将额定载荷增大一定的倍数作为等效的动载荷,在计算时采用静力计算的方法。设计者往往采用过大的动载系数,使结构过于安全,从而造成材料浪费。因此,分析和计算擦窗机的起升冲击载荷,对于提升擦窗机的整体工作性能具有重要意义。
本文在对伸缩臂擦窗机的结构和基本要求进行分析的基础上,将擦窗机从地面吊起吊篮的作业过程分3个阶段进行研究,通过等效刚度和等效质量的替换,将二自由度系统转化为单自由度系统,提出了动力学简化模型,推导了起升载荷动载系数,并以CWGS250型擦窗机为案例,对其起升冲击载荷进行了分析与计算。
1 伸缩臂擦窗机的结构和基本要求
擦窗机主要用于对高层建筑外墙进行维护和清洁工作。为了满足不同结构造型建筑物的需求,擦窗机有很多种类,按安装方式可以分为:轮载式、屋面轨道式、悬挂轨道式、插杆式和滑梯式等。图1为一种典型的伸缩臂擦窗机的结构示意图。
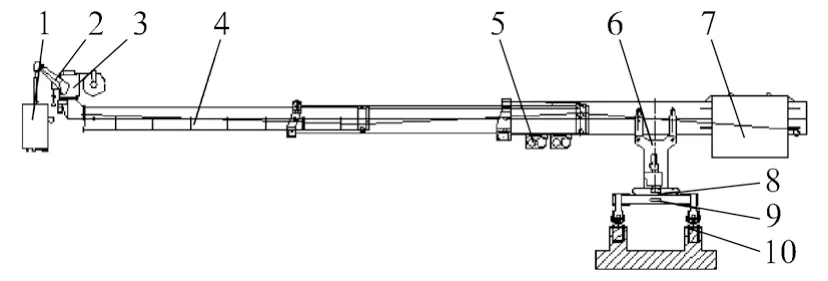
图1 伸缩臂擦窗机的结构示意图
在擦窗机的市场应用中,除了全自动化擦窗机无须载人之外,一般情况下擦窗机都须载人作业。因此,擦窗机重要部件的结构强度和稳定性直接关系到作业人员的生命安全。所以,对擦窗机的主要承载部件进行相关的结构分析与力学计算,以保证擦窗机的可靠性和稳定性,进而保证作业人员的人身安全,具有十分重要的意义。
其中,伸缩臂是擦窗机的主要承载结构。GB/T 19154-2003《擦窗机》[5]规定,擦窗机的伸缩臂必须满足以下基本要求:①擦窗机的伸缩臂和折弯臂有一套单独的驱动装置。对于伸缩臂擦窗机,伸缩臂伸出或缩回的极限位置应装有限位装置;对于折弯臂擦窗机,折弯臂上下摆动的极限位置应装有限位装置;②擦窗机的吊臂为双吊臂时,应保证它们工作的同步性;③臂架的强度、刚度须符合要求;此外,还要有足够的稳定性及抗腐蚀性能。
2 擦窗机伸缩臂的载荷分析
擦窗机的伸缩臂是承载结构,根据其用途的不同,它承受的外载荷也不同。合理地确定载荷值,正确地进行结构分析与设计,是保证擦窗机具有可靠的承载能力和良好的使用性能的重要前提。结合载荷的性质及对伸缩臂所产生的作用,把作用于擦窗机伸缩臂上的载荷大致分为以下3类。
1)主要载荷。即擦窗机正常作业时一直都会存在的载荷,不会因外界条件的变化而突然消失,如擦窗机自身重力所产生的自重载荷、电动机提升引起的起升载荷,以及上升下降过程中制动而产生的惯性载荷等。
2)附加载荷。擦窗机在正常作业时,根据当时具体工作条件可能会存在的载荷,如工作状态下自然条件变化(如风、温度等)引起的载荷等。
3)特殊载荷。擦窗机在作业时,由于外部条件的干扰而额外承受的载荷,如风载荷以及结构发生外部激励引起的载荷等。由于在大风以及有外部激励的情况下,擦窗机一般是不允许工作的,所以,在对其进行载荷计算时基本不考虑这些载荷的作用。
3 起升冲击载荷的分析
在擦窗机起吊或者空中制动时,吊重的运动状态发生改变,会对承载结构和传动机构产生附加动载荷作用,引起整机的不稳定振动,这种动载荷是擦窗机设计中所要考虑的重要载荷之一。由于吊物重力的冲击作用,作为擦窗机主要承载结构的伸缩臂会产生振动,从而产生较大的起升冲击载荷,即在极短的时间内(作用时间小于受力机构的基波自由振动周期的一半)以较大的速度作用在伸缩臂上的载荷。冲击载荷所带来的应力与变形量的计算十分复杂,一般根据机械能守恒定律进行分析。
擦窗机从地面吊起吊篮的作业过程,可分为3个主要阶段。
第一阶段,卷扬机构运作,卷扬机开始收缩钢丝绳,直到钢丝绳刚刚被拉直。此时,卷扬机构的钢丝绳还不受吊力的作用,整个系统处于临界状态。
第二阶段,卷扬机构继续收缩钢丝绳,钢丝绳开始承受吊物重力的作用,并且开始产生弹性伸长。但此时吊篮仍处于静止状态,直到钢丝绳的拉力与吊物的重力相等为止。此时,整个结构产生的位移表示为y1。
第三阶段,吊篮脱离了地表,在空中处于振动状态。此时,整个结构产生的位移表示为y2。
下面对擦窗机起吊过程中第二阶段和第三阶段所产生的动力响应展开研究。在对这一问题进行研究前,首先有以下几个基本假设:①考虑擦窗机作业的特殊性,在大风等自然环境比较恶劣的条件下是不允许作业的,因此,忽略风载荷等外界因素的影响;②卷扬机构在起吊时所产生的振动要远远大于机构自身的振动,因此,在此过程中忽略结构的自身振动;③擦窗机的整个起吊结构是一个多自由度系统,为了方便研究,本文将其简化为单质点等效系统。
在第二阶段,卷扬机构工作,吊篮未脱离地表,擦窗机起吊过程第二阶段的动力学简化模型如图2所示。

图2 第二阶段的动力学简化模型
在图2中,m1表示悬臂梁的换算质量,m2表示吊物的质量,C1表示悬臂梁自由端末端的刚度,C2表示吊钩-卷扬机构组的刚度。
在第三阶段,吊篮刚刚脱离地表,此时,擦窗机起吊系统的动力学简化模型如图3a所示。

图3 第三阶段的动力学简化模型
由图3a可见,此时整个起吊系统等效为二自由度系统。对图3a中的模型进一步简化,通过等效刚度(Ceq)和等效质量(meq)的替换,将二自由度系统转化为单自由度系统,如图3b和图3c所示。图3c中等效刚度Ceq的表达式为

式中,,其中,Qeq表示吊物的等效重力,γ0表示起升机构在吊物重力作用下的静位移,γ0的大小和起升高度H相关,在初步设计进行选值时,一般可取γ0=0.0029H(m)。
在进入第三阶段之后,吊篮就已经脱离了地表,当起升速度稳定为v0时,钢丝绳的拉力与吊物的等效重力Qeq是相等的,假设此时系统的等效质量为meq,可得系统的平衡方程为

式中,,表示吊臂与起升系统在吊物的重力作用(静载)下产生的应变之和。
于是

即

令,代入式(4)得

式(5)的通解为

将初始条件t=0,y=0代入式(6)得

所以

当=时,有最大振幅

进入第三阶段后,由于吊篮振动(动载)而引起的应变δ可表示为

将式(7)代入式(8)得

在金属结构的起升载荷计算中,通常用一个系数φ来考虑起升载荷对金属结构的动力作用[6],在本文,擦窗机起升载荷动载系数φ的表达式为

将δ0=y1+γ0代入式(10),且令v0=bv,得

式中v——上升速度(m/s);
b—— 操作难度系数,擦窗机一般取b=0.5;
g——重力加速度,取g=9.8(m/s2);
y1—— 吊篮在脱离地面前的临界位置时,吊物的重力使擦窗机伸缩臂悬挂点产生的静位移(m)。
擦窗机的起升冲击载荷P1=φP0。
4 起升冲击载荷的计算案例
以雄宇重工集团CWGS250型擦窗机为例,对其起升冲击载荷进行分析计算。
在图4所示的擦窗机伸缩臂受力示意图中,P1为擦窗机起升冲击载荷,P0为擦窗机起升静载荷,满足P1=φP0;L1、L2、L3依次为擦窗机伸缩臂的基臂长度、伸缩臂长度和燕尾臂长度;L4为燕尾臂质心到伸缩臂端部的距离;ΔL为伸缩臂工作伸出长度;G为燕尾臂自重载荷;q1、q2分别为擦窗机基臂与伸缩臂的自重载荷。

图4 擦窗机伸缩臂受力示意图
伸缩臂各部分长度分别为L1=10m,L2=9m,L3=1m,L4=0.4m,ΔL=6.5m;立柱高为H=10m;基臂截面尺寸为宽b=0.50m,高h=0.65m,厚t=10mm。均布载荷q1=170kg/m,q2=150kg/m;燕尾臂重量G=3 000N;擦窗机起升静载荷取P0=10 000N;起升速度取V0=0.2m/s;金属材料为Q235,弹性模量E=2.1×105MPa,钢丝绳的弹性模量Es=1.0×105MPa。
由材料力学可得悬臂梁的惯性矩及最大挠度

卷扬机构的静位移

式中i——钢丝绳的分支数;
As—每根钢丝绳的截面积,mm2。
用钢丝绳截面应力σs(通常取平均应力σs=240MPa)代入式(12),得

将已知量代入式(13)得

根据GB50018-2002《冷弯薄壁型钢结构技术规范》[7],对于擦窗机伸缩臂,一般取b=0.5。
于是,擦窗机起升载荷动载系数为

擦窗机起升冲击载荷为

可知,在擦窗机起吊或空中制动时,由于吊物重力的冲击作用,伸缩臂会产生振动,导致动载荷的产生,使结构处于振动状态,增大了起升载荷的静力值,所以在计算时可以将起升载荷乘以大于1的起升载荷动载系数 ,以有效计算起升载荷的这种动力响应。
5 结 论
本文在对伸缩臂擦窗机的结构和基本要求进行分析的基础上,将擦窗机从地面吊起吊篮的作业过程,分为3个主要阶段进行研究,通过等效刚度和等效质量的替换,将二自由度系统转化为单自由度系统,提出了相应的动力学简化模型。根据作业过程的动力学简化模型,推导了起升载荷动载系数φ,并对起升冲击载荷进行了分析与计算,可作为擦窗机结构设计的技术参考。
[参考文献]
[1]兰阳春,薛抱新.擦窗机设计概述[J].建筑机械化,2010,31(7):43-46.
[2]黄日龙.大型轨道式擦窗机的结构优化设计和稳定性分析[D].江南大学,2014.
[3]张 珂,吴仁山,曹远洋.浅谈斜爬轨道式擦窗机的设计及应用[J].建筑机械化,2016,37(7):28-31.
[4]毛伯永,谢石林,张希农.冲击载荷识别的瞬态统计能量分析方法[J].振动与冲击,2013,32(14):46-51+63.
[5]GB 19154-2003,擦窗机[S].
[6]郑夕健,时海洋,常晓华,等.屋面轨道式擦窗机起升动载系数分析[J].建筑机械化,2015,36(8):45-49.
[7]GB 50018-2002,冷弯薄壁型钢结构技术规范[S].