基于材料特性的压路机最佳速度模型与仿真
2018-05-24刘洪海刘腾辛强郑平安
刘洪海,刘腾,辛强,郑平安
压实是通过专门的设备,增加材料单位体积内固体颗粒数量,减小空隙的过程。不同类型的设备工作原理不同,会产生不同性质的作用力;作用力的性质不同,又会对材料产生不同的作用效果。振动压路机利用振动轮内高速旋转的偏心机构,通过调整运动参数,使被压材料产生高效压实效果[1]。关于压路机运动参数与压实效果之间的关系一些国内外学者进行了研究,麦雄平[2]研究了压路机振动加速度与压实度之间的关系,得出振动加速度幅值对有效振幅的影响;尹继瑶[3]研究了碾压速度对压实能力的影响,认为一个振动周期下,振动轮行驶距离在3 cm以内较为合理;冯建亮等[4]基于钢轮接地宽度与冲击间距相等的原则,确定了最佳碾压速度。许多研究均表明振动压路机的运动参数对被压材料的压实效果有显著影响[5-9],因此,如何定量确定振动压路机的合理压实速度受到关注。本文在已有研究的基础上,从设备和材料之间相互作用关系出发,针对碾压过程中材料变形特性,通过Burgers模型分析,推导压路机碾压过程数学模型,确定临界压实速度,并采用Matlab对影响因素进行仿真分析。
1 运行中的激振器与被压材料之间产生共振的条件
振动压路机的压实作用是一个复杂的随机过程,在此过程中,材料颗粒发生位移,颗粒间隙中的空气排除,达到压实紧密的效果。共振学说常用来解释振动作用产生的高效压实现象,该学说认为当激振频率与被压材料的固有频率一致时,材料发生共振现象,颗粒振幅增加,内摩阻力减小,压实效果最佳[10]。共振理论描述的是被压材料产生共振的基本原则,其前提条件是激振器与被压材料之间能够有足够的作用次数。对于运行中的激振器而言,两者之间产生共振的条件,则需要基于该理论,通过分析两者之间的相互作用关系获得,并满足以下2个条件。
1.1 被压材料产生共振的必要条件
自然振动是材料的一种固有的振动特性,它具有谐波的振动特征,在被激发之后会独立于激发强度进行自我调节,每个振动幅度在其系统的特征频率下重复出现,该特征频率称为固有频率。固有频率取决于设备与材料组成的系统特征,如设备大小、材料参数、接触情况及临界条件等,如果某系统中包含有若干个固有频率,每个固有频率都有其自身的振动模式,当用与固有频率之一相同的频率去激发该系统,并获得激发之后将产生高振幅的共振现象。共振理论认为最佳压实效果在机器与材料组成的系统自然频率内获得。
1.2 被压材料产生共振的充分条件
被压材料颗粒由静止状态到运动状态需要一个过渡过程,在过渡过程中只有连续的对其进行激振,才能使其处于振动状态,这是产生共振的充分条件。过渡过程与线性动荷载对材料颗粒的连续激振次数有关,研究表明材料颗粒至少应连续受到 3次以上的激振,才能处于振动状态[11]。只有当颗粒处于振动状态,且振动频率与被压材料的固有频率相适应时,被压材料才会发生共振,减小材料之间的内摩阻力,使颗粒具有更好的取向。过渡过程的影响因素主要有压路机的振动轮直径、振动频率、碾压速度以及铺层材料特性和厚度等。
2 沥青混合料压实过程模型
2.1 Burgers模型
沥青混合料由沥青、矿料和空隙组成,在正常施工温度下,碾压过程中近似的认为其具有非线性黏弹性力学行为,弹性变形与塑性变形如图1所示。图中,横坐标为压路机经过某点的时间,纵坐标为被压材料的应变。t0为产生最大应变时刻,εe为发生瞬时弹性变形的应变量,εde为延迟弹性变形应变量,εv为塑性变形应变量。压路机碾压过程中,被压材料的变形由弹性变形和塑性变形2部分共同组成。这个过程可以由沥青流变学中的Burgers模型进行描述,见图2所示[12-20]。
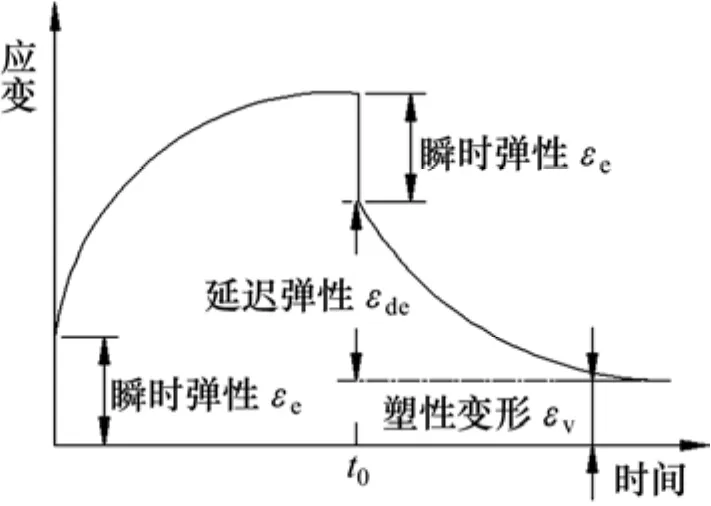
图1 混合料变形过程Fig. 1 Deformation process of mixture

图2 Burgers模型Fig. 2 Model of Burgers
图中,σ为正应力,kPa;E0为瞬时弹性模量,kPa;E1为延迟弹性模量,kPa;η1为延迟塑性系数,kPa·s;η0为塑性系数,kPa·s。Burgers模型由 Maxwell模型和Kelvin模型串联组成,Burgers模型的本构方见式(1):

式中:ε为正应变;t为加卸载时间,s。根据该模型作以下分析:
在整个碾压过程中,混合料同时存在着瞬时弹性变形、延迟弹性变形和塑性变形,但是在不同的碾压阶段总变形中的弹性变形和塑性变形所占有的比例有所不同。
碾压初期,混合料铺层空隙较大,碾压阻力较小,材料易于变形,在这个阶段弹性变形所占的比例很小,塑性变形所占的比例较大。碾压过后,瞬时弹性变形立即恢复,延迟弹性变形也逐渐恢复,最终保留了塑性变形量;接近碾压终了时,颗粒间空隙较小,碾压阻力较大,材料难于变形。在这个阶段塑性变形所占的比例很小,弹性变形所占的比例较大。碾压过后,弹性变形立即恢复,延迟弹性变形逐渐恢复,最终几乎不保留塑性变形量;中间碾压过程,随着碾压遍数增加塑性变形所占的比例逐渐减小,弹性变形所占的比例逐渐增大。塑性变形量小于初期碾压值,大于终了碾压值。
由以上分析,可得不同碾压遍数下被压材料加卸载形变图,见图3所示。图中,曲线1为初始碾压过程;曲线2为中间碾压过程;曲线3为终了碾压过程。
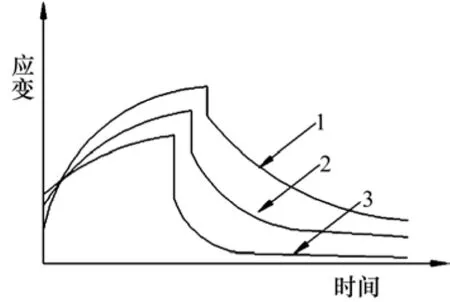
图3 不同碾压过程被压材料加卸载形变示意图Fig. 3 Sketch map of loading and unloading deformation in different processes of compaction
2.2 压路机压实过程数学模型
振动压路机的压实速度对压实效率和压实效果有着显著的影响,压实速度不宜过高,以使振动轮对材料施加足够的激振次数,产生共振;压实速度越低,振动轮对材料颗粒的激振次数越多,越易激发材料发生共振;但不宜过低,否则会降低施工效率,产生过压破坏材料原有级配或铺层产生推移。所以,压实速度存在最佳值,既能保证颗粒达到充足的激振次数,又使设备具有较高的生产效率。为了确定最佳速度,需建立压路机压实过程数学模型。压实过程中,压路机振动轮在铺层材料上的滚压过程见图4所示。
图4为压路机向右运动时振动轮与被压材料弧形接触截面图,c为接触起点,b为接触最低点,d为接触分离点。由图中的几何关系可得:

式中:h1为材料的塑性变形量,m;h2为材料的弹性变形量,m;D为振动轮直径,m。
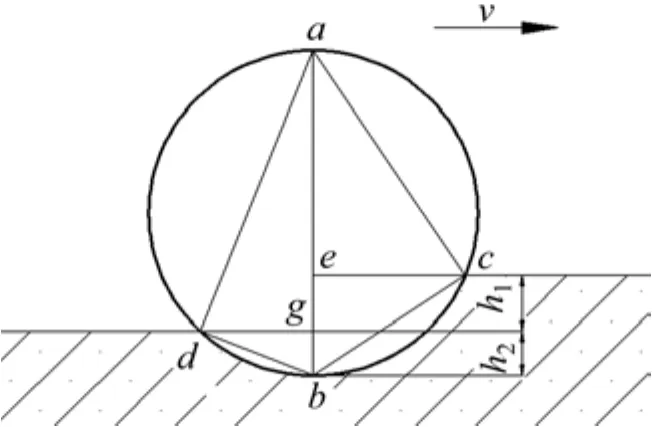
图4 振动轮与被压材料弧形接触截面图Fig. 4 Sectional view of arc contact of vibration wheel and pressed materials
同理可得:

则ce为:

同理,dg为:

碾压过程中,由于振动轮直径D远大于形变量h1和h2,故式(4)~(5)可简化为:

由前文所述共振产生的充分条件可知,若振动压路机满足通过ce + d g的时间内,振动轮对同一点施加不少于3次的有效振动,振动压路机的工作速度(m/s)应满足下式的要求:

式中:v0为振动压路机最佳压实速度,m/s;ce + bg为振动轮滚动距离,m;T为振动周期,s。
将式(6)~(7)代入式(8),可以导出以下工作速度(km/h)公式:

式中:f为振动频率,Hz。
由 Burgers模型知,混合料弹性应变为 εe,塑性应变为εv,且应变量存在如下关系:

式中:H为混合料铺层厚度,m。
将式(10)~(11)代入式(9),可得压路机最佳压实速度关系式:

由式(12)可知,压路机最佳压实速度与被压材料铺层厚度、碾压应变以及压路机的钢轮直径、振动频率之间存在定量关系,由设备参数及材料特性共同决定。由于在不同的碾压阶段,混合料的弹性应变和塑性应变所占比例不同,因此需要针对具体碾压过程进行分析。
3 碾压过程应变分析
由Burgers模型可知,初次碾压过程以塑性变形为主,终了碾压过程以弹性变形为主。假设初次碾压过程只存在塑性变形(瞬时弹性变形很小且能立即恢复,故可忽略),终了碾压过程只存在弹性变形(压实度接近100%,塑性变形可忽略)。对初次碾压和终了碾压过程应变作如下分析。
3.1 初次碾压状态下塑性应变分析
初次碾压过程中,混合料的塑性变形量主要与铺层压实度和材料特性相关,可通过铺层中任取一个单元体进行分析,见图5所示。单元体在压路机振动轮作用下处于三向应力状态,即2个横向应力σ2和σ3和1个竖直应力σ1[21]。进行分析之前作如下假设:
1) 碾压前后,混合料均匀一致,无材料离析和温度离析现象。
2) 碾压后,混合料压缩比一致。
3) 振动轮作用下,2个横向应力大小相等。
此单元体,在碾压前后的体积变化存在如下关系:

式中:v′为单元体碾压后体积,m3;v为单元体碾压前体积,m3;vε′为单元体塑形应变量;μ为泊松比(即铺层横向和竖向应变之比)。
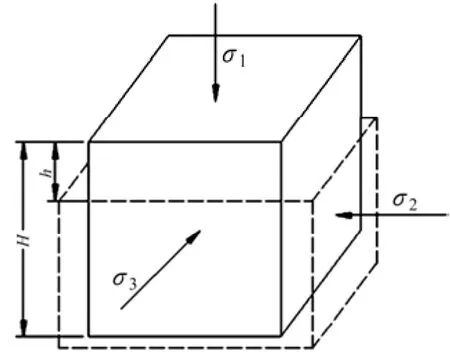
图5 单元体受力情况Fig. 5 Force of unit
道路施工中,可定义沥青路面压实度为材料的现场密度与理论最大密度之比,即:

式中:η为路面材料压实度,%;ρ′为沥青混合料最大理论密度,kg/m3;ρ为沥青混合料现场密度,kg/m3。在压路机碾压前后,沥青混合料质量M保持不变,并根据沥青混合料密度与体积和质量之间关系,可得到沥青混合料塑性应变为:

热拌沥青混合料施工中,由于路面宽度较大,且存在路缘石的横向约束,可认为混合料横向应变近似为0,则泊松比μ≈0,故上式可简化为:

因此,对于某一确定的路面材料,其初始碾压过程塑性应变与混合料的压实度之间存在着特定的关系。
3.2 碾压终了状态下弹性应变分析
在接近碾压终了时,混合料几乎不再产生塑性变形,此时可将铺层简化为具有一定厚度的刚性体。在压路机碾压过程中,路面受力状态可简化为只受到竖直方向的激振力,如图6所示。
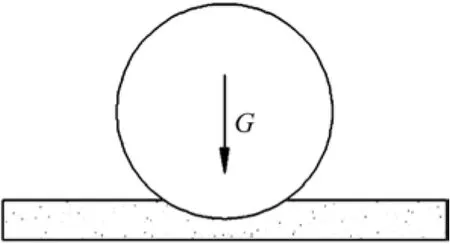
图6 刚性路面材料受压状态Fig. 6 Compression state of rigid pavement materials
为了评价振动压路机的压实能力,引入动线压力 q。压路机的动线压力指沿着振动轮轴向单位长度上对地面所施加的动压力。其表达式为:

式中:q为压路机动线压力,kN/m;G为压路机激振力,kN;B为振动轮压实宽度,m。
由图2可知,由于压路机直径远大于弹性形变量,因此碾压终了时,压路机与被压材料的接触弧长对应的弦长由下式计算:

式中:L为弦长,m。则铺层所受竖直方向正应力为:

式中:σ为铺层所受竖直方向正应力,kPa。混合料弹性应变由式(20)表示,变形量与应变由式(21)表示,则联立式(19)~(21),可得沥青混合料碾压终了弹性变形量,见式(22)。式中,E为铺层弹性模量,kPa。
4 压路机临界碾压速度模型
碾压过程中,在不同阶段混合料铺层的塑性应变和弹性应变在总应变中所占比例不同,可由下式表示:

式中:a为碾压过程中塑性应变所占比例;b为碾压过程中弹性应变所占比例。该比例大小与碾压过程中混合料的压实度相关,近似认为两者存在式(25)关系。对于普通摊铺机而言,摊铺作业的松铺层密实度不低于60%[22]。此时碾压,铺层主要发生塑性变形,近似认为a=1;混合料碾压完毕后达到最大理论密度时,主要存在弹性变形,近似认为b=1。在此条件下,可得如下关系式:

将式(26)代入式(23)和式(24),可得到压路机振动压实临界速度表达式方程组,见式(27)。

由式(27)可知,压路机临界碾压速度由混合料的材料特性和压路机的设备参数共同决定,临界碾压速度决定于铺层厚度、弹性模量、压路机振动轮直径、振动频率以及混合料的压实度等参数。
5 MATLAB仿真分析
采用Matlab软件对临界碾压速度与设备参数、材料特性参数等因素进行仿真分析。
5.1 不同轮径下的临界速度分析
在其他条件不变的情况下,压路机振动轮直径大小直接影响接地弧长,以沥青混合料施工中常规设备和材料参数为条件,对其进行仿真分析。令f=45 Hz,q=50 kN/m,H=0.06 m,E=50 MPa;在振动轮直径分别为D1=1.2 m,D2=1.3 m,D3=1.4 m,D4=1.5 m,D5=1.6 m时,根据式(27)作出压实度与速度之间关系曲线,见图7所示。
由图7几条几乎平行的曲线可知:1)钢轮直径对曲线的变化趋势没有明显影响,铺层压实度越高,最佳压实速度均越小;当铺层压实度达到96%以上时,最佳压实速度基本保持不变。2)在相同的铺层压实度下,不同的振动轮直径对最佳压实速度有影响,振动轮直径越大,最佳压实速度越高。常用压路机振动轮直径约为1.4 m左右,相对于最大理论密度的压实度为94%(混合料空隙率约为6%,为施工技术规范建议的设计控制空隙率[23])时,最佳压实速度4.3 km/h,轮径变化1%,最佳压实速度约变化0.54%。
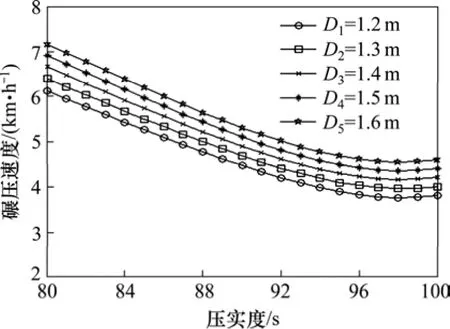
图7 不同轮径下的压实度与最佳压实速度曲线Fig. 7 Compactness and optimum compaction velocity curve under different wheel diameter
5.2 不同铺层厚度下的临界速度分析
在同等密实度和相同压路机条件下,对同一种混合料而言铺层厚度影响变形量。铺层厚度越大,压路机与被压材料所形成的接触面越大,被压颗粒在相同的激振的次数下,允许的压实速度可以增加。以沥青混合料施工中常规设备和材料参数为条件,对其进行仿真分析。令f=45 Hz,D=1.4 m,q=50 kN/m,E=50 MPa;在铺层厚度分别为H1=0.04 m,H2=0.05 m,H3=0.06 m,H4=0.07 m,H5=0.08 m条件下,根据式(27)作出压实度与速度之间关系曲线,见图8所示。
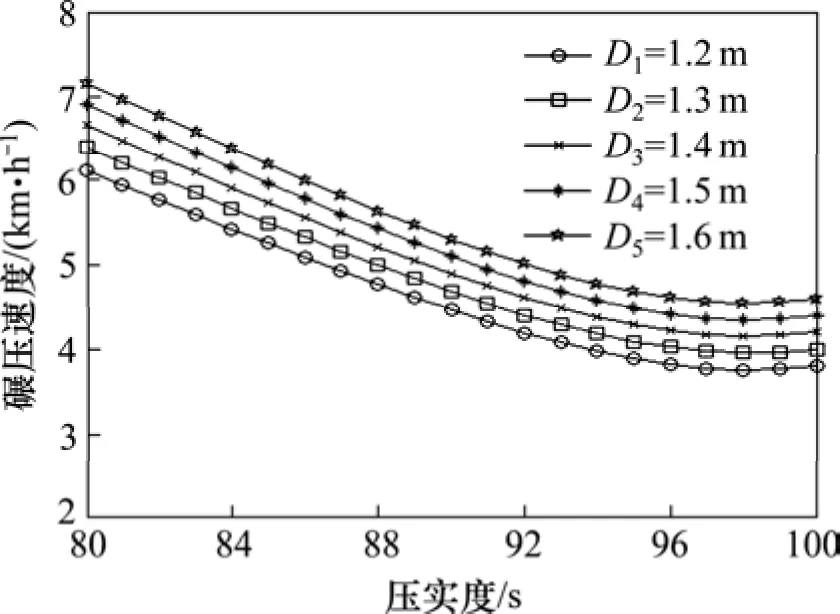
图8 不同铺层厚度下的压实度与最佳压实速度曲线Fig. 8 Compactness and optimum compaction velocity curve under different layer depth
由图8曲线可知:1) 不同的铺层厚度具有相似的变化趋势,铺层压实度越高,最佳压实速度越小;当铺层压实度达到96%以上时,最佳压实速度基本保持不变。2) 在相同的压实度下,不同的铺层厚度对最佳压实速度有影响,铺层厚度越大,最佳压实速度越高。在铺层厚度0.06 m,相对于最大理论密度的压实度为94%时,最佳压实速度为4.0 km/h,铺层厚度变化1%,最佳压实速度约变化0.45%。
5.3 不同弹性模量下的临界速度分析
对于相同设备在同等密实度条件下,混合料的弹性模量不同会影响最佳碾压速度。弹性模量越大,压路机与被压材料系统所形成的接触面越小,被压颗粒在相同的激振的次数下,允许的压实速度将降低。以沥青混合料施工中常规设备和材料参数为条件,对其进行仿真分析。令f=45 Hz,D=1.4 m,H=0.06 m,q=50 kN/m;在混合料的弹性模量分别为 E1=30 MPa,E2=40 MPa,E3=50 MPa,E4=60 MPa,E5=70 MPa条件下,根据式(27)作出压实度与速度之间关系曲线,见图9。
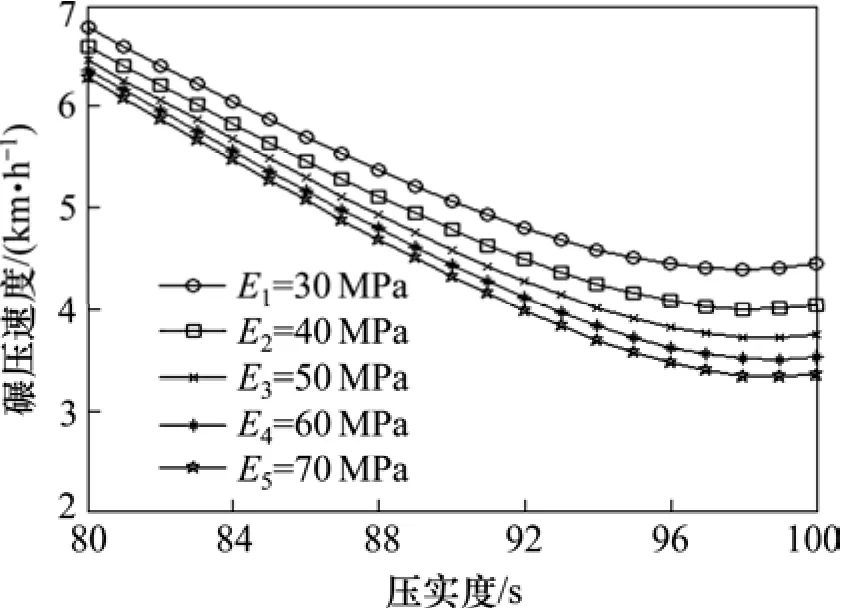
图9 不同弹性模量下的压实度与最佳压实速度曲线Fig. 9 Compactness and optimum compaction velocity curve under different modulus of elasticity
由图9可知:1) 不同的弹性模量具有相似的变化趋势,即铺层压实度越高,最佳压实速度越小,所不同的是随着压实度的增大,模量大较模量小变化的缓慢一些;当铺层压实度达到96%以上时,最佳压实速度基本保持不变。2) 在相同的铺层压实度下,不同的弹性模量对最佳压实速度有影响,弹性模量越大,最佳压实速度越低。通常在允许的施工温度范围内混合料铺层的弹性模量小于50 MPa,相对于最大理论密度的压实度为94%时,最佳压实速度约为4.2 km/h,弹性模量变化1%,最佳压实速度约变化0.39%。
6 结论
1) 对于运行中的激振器而言,与材料之间产生共振需满足2个条件,一是激振器的振动频率与被压材料的固有频率相符;二是同一被压材料需要受到3次以上的连续激振,使其进行受迫振动。
2) 压路机最佳压实速度由设备参数、被压材料密实度及材料特性共同决定,与被压材料铺层厚度、压路机的钢轮直径、振动频率等参数之间正相关,与铺层压实度、弹性模量等参数之间负相关;对于沥青路面施工中的常用设备参数(如f=45 Hz,D=1.4 m,q=50 kN/m)和典型的材料参数(如H=0.06 m,E=50 MPa),通过仿真分析可知,满足相对于最大理论密度的压实度为94%的规范设计要求时,振动压路机最佳压实速度约为4.0 km/h。
参考文献:
[1] 冯建生, 冯忠绪, 胡碧阳. 振动压路机振动轮上机架的偏振分析[J]. 长安大学学报(自然科学版), 2016, 36(5):103-109.
FENG Jiansheng, FENG Zhongxu, HU Biyang.Polarization analysis of vibratory roller wheel frame[J].Journal of Chang’an University (Natural Science Edition),2016, 36(5): 103-109.
[2] 麦雄平. 基于COSMOS的振动压路机振动加速度与压实度关系研究[D]. 重庆: 重庆交通大学, 2009.
MAI Xiongping. COSMOS―based acceleration of vibratory roller vibration roller vibration study and the relationship between degree of compaction[D].Chongqing: Chongqing Jiaotong University, 2009.
[3] 尹继瑶. 振动压路机的压实能力与碾压速度[J]. 建设机械技术与管理, 2007, 19(4): 61-64.
YIN Jiyao. Compaction capacity and velocity of vibratory roller[J]. Construction Machinery Technology and Management, 2007, 19(4): 61-64.
[4] 冯建亮, 赵真, 冯忠绪. 振动压路机碾压速度的选择[J]. 建筑机械, 2012, 31(5): 76-78.
FENG Jianliang, ZHAO Zhen, FENG Zhongxu. Selection of compaction velocity of vibratory roller[J].Construction Machinery, 2012, 31(5): 76-78.
[5] 龚创先. 振动压路机压实性能研究与优化[D]. 湘潭:湘潭大学, 2013.
GONG Chuangxian. The proble into compact capacity of vibratory roller and optimaze[D]. Xiangtan: Xiangtan University, 2013.
[6] 童飞. 从“土壤―机器”系统力学的角度探讨振动压路机的参数设计[D]. 上海: 同济大学, 2007.
TONG Fei. Discusion on design of parameters of the vibration roller from the perspective of “Solid-machine”system mechanics[D]. Shanghai: Tongji University, 2007.
[7] 程瑜. 双钢轮振动压路机性能评价指标体系研究[D].西安: 长安大学, 2014.
CHENG Yu. Study on property evaluation index system of double-drum vibratory roller[D]. Xi’an: Chang’an University, 2014.
[8] Dil Faraz Khan, Haiqing Yin, Zahid Usman, et al.Improvement of a high velocity compaction technique for iron powder[J]. Acta Metallurgica Sinica (English Letters), 2013, 26(4): 399-403.
[9] XU Q, CHANG G K. Evaluation of intelligent compaction for asphalt materials[J]. Automation in Construction, 2013, 30(6): 104-112.
[10] WANG Chi, ZHOU Yuqiu, SHEN Gaowei, et al.Numerical analysis of the resonance mechanism of the lumped parameter system model for acoustic mine detection[J]. Chinese Physics B, 2013, 22(12): 312-318.
[11] 杨士敏, 傅香如. 工程机械地面力学与作业理论[M].北京: 人民交通出版社, 2010: 188-189.
YANG Shimin, FU Xiangru. Ground mechanics and operation theory of construction machinery[M]. Beijing:China Communications Press, 2010: 188-189.
[12] 王丰胜. 基于Burgers黏弹性模型的沥青路面蠕变变形规律三维有限元分析[J]. 工业建筑, 2014, 50(3): 104-109.
WANG Fengsheng. A 3D fem analysis of creep deformation law of asphalt pavement based on bugers viscoelastic model[J]. Industrial Buildings, 2014, 50(3):104-109.
[13] 康永刚, 张秀娥. 岩石蠕变的非定常分数伯格斯模型[J]. 岩土力学, 2011, 32(11): 3237-3241.
KANG Yonggang, ZHANG Xiue. Nonstationary parameter fractional Burgers model of rock creep[J].Rock and Soil Mechanics, 2011, 32(11): 3237-3241.
[14] YANG Shengqi, HENG Qi, JIANG Yuzhou. Triaxial mechanical creep behavior of sandstone[J]. Mining Science and Technology, 2010, 20(3): 339-349.
[15] ZHANG Yu, XU Weiya, GU Jinjian, et al. Triaxial creep tests of weak sandstone from fracture zone of high dam foundation[J]. Journal of Central South University, 2013,20(9): 2528-2536.
[16] ZHANG Huabin, WANG Zhiyin, ZHENG Yali, et al.Study on triaxial creep experiment and constitutive relation of different rock salts[J]. Safety Science, 2012,50(4): 801-805.
[17] LI Yongsheng, XIA Caichu. Time-dependent tests on intact rocks in uniaxial compression[J]. International Journal of Rock Mechanics and Mining Sciences, 2000,37(3): 467-475.
[18] Gerald H, Stacy Glidden. Development of mixture creep performance tests using a dynamic shear rheometer[R].Transportion Research Board of the National Academies,2004.
[19] Christensen D, Pellinen T, Bonaquist R. Hirsch model for estimating the modulus of asphalt concrete[J]. Journal of the Association of Asphalt Paving Technologists, 2003,72(4): 97-121.
[20] Christensen D W, Anderson D A. Interpretation of dynamic mechanical test data for paving grade asphalt cements[J]. Journal of the Association of Asphalt Paving Technologists, 1992, 61(6): 59-72.
[21] 孙祖望, 刘洪海. 沥青路面平整度的传递规律及其试验研究[J]. 筑路机械与施工机械化, 1999, 16(1): 9-12.
SUN Zuwang, LIU Honghai. Study on transmission law of asphalt pavement evenness and its test[J]. Road Machinery & Construction Mechanization, 1999, 16(1):9-12.
[22] GB/T 16277―1996, 沥青混凝土摊铺机[S].GB/T 16277―1996, Asphalt concrete paver[S].
[23] 于江, 张金辉, 张帆, 等. 沥青混合料空隙率测定方法研究[J]. 中外公路, 2014, 34(2): 226-229.
YU Jiang, ZHANG Jinhui, ZHANG Fan, et al. Study on the determination method of asphalt mixture void fraction[J]. Journal of China and Foreign Highway, 2014,34(2): 226-229.