纯电动自动驾驶观光车的制动防抱死系统设计与研究
2018-05-21程泊静李治国
程泊静,陈 刚,陈 标,李治国
(湖南汽车工程职业学院,湖南 株洲412000)
随着科技的发展,自动驾驶技术得到了社会越来越多的关注。制动系统是车辆最关键的安全系统之一,车辆要实现自动驾驶首先要确保制动系统的稳定性和安全性。依据目前的有人驾驶的纯电动观光车驾驶平台进行自动驾驶的纯电动观光车驾驶平台改造工程,对自动驾驶技术发展具有重要意义。汽车制动防抱死系统,英文简称ABS,是提高汽车制动安全性的一个重要技术。ABS由汽车微电脑控制,当车辆制动时,它能使车轮保持转动,从而帮助驾驶员控制车辆达到安全的停车[1]。这种防抱制动系统是用速度传感器检测车轮速度,然后把车轮速度信号传送到微电脑里,微电脑根据输入车轮速度,通过重复地减少或增加在轮子上的制动压力来控制车轮的打滑率,保持车轮转动。在制动过程中保持车轮转动,不但可保证控制行驶方向的能力,而且,在大部分路面情况下,与抱死(锁死)车轮相比,能提供更高的制动力量。
1 纯电动自动驾驶观光车的制动系统改造方案
1.1自动驾驶整体方案设计
现如今液压制动技术已经相当成熟[2],对试验车辆液压制动系统进行自动化改造应不影响现有的制动性能。
为使纯电动观光车能够自动驾驶,首先需要给出整体方案设计(图1)。上层决策模块主要功能包括环境感知、环境建模和路径规划。其中环境感知模块通过外部环境感知传感器,如激光雷达[3]、摄像机、红外相机、夜视设备、毫米波雷达等,获取前方及周围行驶环境信息[4]。本试验车辆使用激光雷达和毫米波雷达进行环境感知,通过两种雷达的信息融合,得到当前环境的行驶现状。路径规划模块根据这些信息结合当前车辆设定的行驶任务进行局部路径规划,从而得到期望的行驶路径轨迹。当行驶路径轨迹规划完成,车辆控制模块会根据上层发出的信息结合车辆当前位置状态,计算出车辆纵向和横向控制的具体要求。最后具体的控制要求会输入相应的模块去进行执行。

图1 自动驾驶整体方案设计
1.2制动系统改造方案
目前国内学者对自动驾驶汽车的制动系统改造提出了多种方案。例如,电控制动、电控气压制动、双回路电控-液压制动[5]等等。本文研究的对象是纯电动观光车(图2),原车制动系统结构简单,在设计改造方案的过程中考虑到实用性和未来产业化的经济性,最终选择加装机械机构拉动制动踏板,并使用电机控制机械机构的方案。执行机构是该自动驾驶车辆制动系统中直接操纵制动踏板的关键部件,为保证方案的顺利实施和未来产业化的可能。因此设计方案应遵循如下原则:
(1)自动驾驶时,能良好执行控制命令。
(2)人工接管时对驾驶员干扰小。
(3)该机构可靠性高、故障率低。
(4)适当降低成本。

图2 观光车实物图
根据设计方案的要求,设计出了如图3所示的执行机构。

图3 执行机构示意图
电机是电动推杆的动力来源是该执行机构的核心部件,也是该电动观光车实现自动制动过程中被控制的机构。考虑到设计方案的需求,电机的选择应尽量成本低、故障率低、执行可靠。
2 纯电动自动驾驶观光车的制动防抱死系统设计
制动防抱死系统(ABS)可以有效避免车辆在紧急制动时车轮因抱死而导致失控的状况,从而提高车辆制动的安全性能。在对该车辆进行制动防抱死系统改造时应先进行模拟仿真试验。
2.1轮胎模型的建立
为了便于问题的研究,假设整个汽车的重量由一个车轮承担如图4所示,可得出下列方程:

车轮纵向摩擦力:Fxb=μFN=μmg
其中:m为1/4车辆质量;u为车辆行驶速度;μ为路面附着系数;FN为车轮对地面的正压力;Fx为车轮受到地面的阻力;Iw为车轮转动惯量;r为车轮滚动半径;Fb为车轮制动器制动力矩;w为车轮角减速度。

图4 车轮受力模型
2.2分段线性模型
轮胎采用简单的双线性模型,如图5所示,轮胎模型可以表达为:

上式中,μ为峰值附着系数;μh为最佳滑移率,即峰值附着滑移率;μg为车轮抱死时的附着系数;Sb为车轮滑移率。

图5 轮胎双线性模型
3 MATLAB仿真试验
3.1控制流程模型
汽车在防抱死的过程中,以滑移率为控制参数,其主控目的是使车轮的滑移率尽可能接近或等于最佳滑移率0.2,上面的动力模型参数由表1给出,设定的附着系数分别为μh=0.8,μg=0.6并且此时设定Smin=0.18,Smax=0.22.控制流程模型如图6所示。
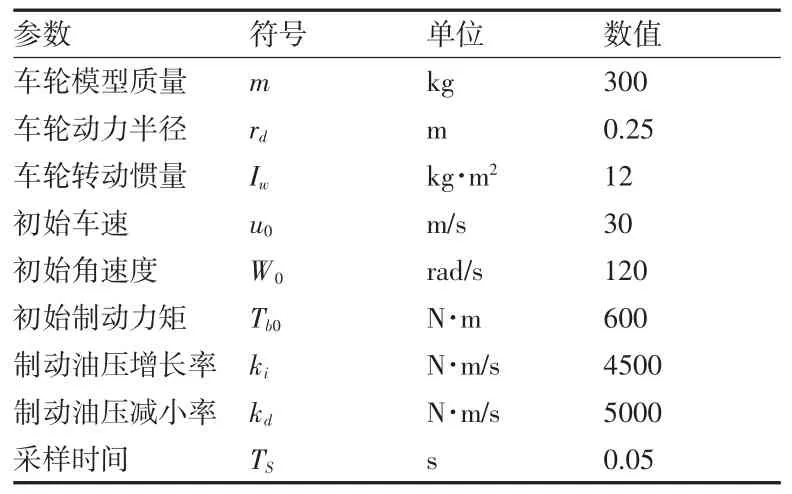
表1 动力模型参数表

图6 控制流程模型
3.2 SIMULINK搭建模型
运用SIMULINK搭建仿真模型如下图7所示。

图7 SIMULINK仿真模型
因为在驱动时是如图8,首先通过辨识出来的车身速度和轮速,计算出当时的滑移率,随着车子前进,车速和轮速不断变化,滑移率也不断变化。随滑移率的改变而发生了改变如图9.

图8 SIMULINK仿真-速度与滑移率

图9 SIMULINK仿真-滑移率与附着系数
随着滑移率的变化,根据滑移率和附着系数的曲线图,附着系数会发生相应的变化。
MATLAB中用Switch模块来进行这个变化的仿真。此时取S0=0.2,当滑移率进来,Switch模块进行判定,当S>0.2时,上面的通道导通,即功能模块图6中功能模块Fcn器起作用,里面的公式为:当时,下面的功能模块 Fcn1起作用,里面公式为

4 仿真结果分析与结论
从图10中可以看出,轮速和车速的差值始终保持一定的速度差,使车速保持平稳的速度下降。轮速在一开始急刹车制动时急剧下降,当滑移率过大时,系统减压,制动力减小,轮速开始回升,这样有效的防止车轮抱死的情况发生。其中A线为车轮速度,B线为车身速度。

图10 车轮-车身速度曲线
装载ABS后制动距离预测结果如图11所示。

图11 制动距离曲线
通过对仿真结果分析,发现如果将现有车辆的制动系统装载制动防抱死系统将能很好地控制车速,获得很好的制动性能。
本文描述了该纯电动自动驾驶观光车的整个改造方案设计,进一步详细论述了其制动系统改造方案设计。通过MATLAB/SIMULINK仿真平台上模型的搭建完成了对该纯电动自动驾驶观光车装载制动防抱死系统的计算仿真,为后续的改造方案实施提供了指导意义。
参考文献:
[1]王伟达,丁能根,张 为,等.ABS逻辑门限值自调整控制方法研究与试验验证[J].机械工程学报,2010,46(22):90-95,104.
[2]高 吉.新型电子液压制动系统研究[D].长春:吉林大学,2016.
[3]王世峰,戴 祥,徐 宁,等.无人驾驶汽车环境感知技术综述[J].长春理工大学学报(自然科学版),2017,40(01):1-6.
[4]朱 敏,陈慧岩,熊光明.无人驾驶轮式车辆电控气压制动技术,研究[J].兵工学报,2015,36(11):2017-2023.
[5]陈慧岩,张瑞琳,朱晓龙,等.越野无人驾驶车双回路电控-液压制动系统设计及试验[J].北京理工大学学报,2016,36(07):695-700.