基于智能多代理系统的VSC-MTDC系统分布式控制策略
2018-05-16佘冯建王炜宇曹一家
佘冯建,李 勇,王炜宇,曹一家
(湖南大学 电气与信息工程学院,湖南 长沙 410082)
0 引言
近年来,风电、光伏等新能源发电方式得到了广泛的应用,其有效的并网方式是研究热点。将海上风力发电输送到电网,传输距离较远,而且容量大。基于电压源型换流器的多端柔性直流输电(VSC-MTDC)系统将成为解决这些问题的关键技术手段之一[1]。VSC-MTDC系统在经济和技术方面具有诸多传统直流输电系统所不具备的优点,如成本低、能实现有功和无功功率解耦控制、损耗小、可多落点受电和多电源供电[2-4],因此多端柔性直流输电系统是海上风电场并网的有效方式。
国内外学者对VSC-MTDC系统的协调控制策略已经开展了深入的研究。主从控制策略、直流电压偏差控制策略、直流电压下垂控制策略是目前VSC-MTDC系统中3种最常见的协调控制策略[5]。主从控制通常设定某个换流站为主站,并且将其作为功率平衡节点来实现定电压控制,其他换流站则作为从站来控制输出的有功功率,这种控制方式有较高的通信要求[6];直流电压偏差控制策略则是在主从控制基础上的一种改进方法,假定作为主站的换流站因故障退出运行,系统直流侧电压会发生波动,这时预先设定作为预备站的从站就履行主站的职责,切换成直流电压控制模式以保持系统直流电压的稳定,这种控制方式设计简单、可靠性强[7];直流电压下垂控制策略的基本原理是根据功率与频率的下垂控制关系,通过监测系统直流侧电压偏差量,快速分配换流站有功功率以稳定直流电压[8]。
近年来,智能多代理系统MAS(Multi-Agent System)技术发展迅速,其为VSC-MTDC系统的协调控制提供了新的研究思路[9]。Agent本身具有自治性、反应性等特点,它能感知周围环境的变化并做出迅速调整。MAS中各Agent并行运作,并且只与邻居的Agent进行信息交换,可以减少通信延迟对MAS的不利影响。MAS中的控制器发挥作用,可以保持系统功率平衡并实现频率支撑。
本文提出了一种基于MAS的VSC-MTDC系统协调控制策略,使VSC-MTDC系统能够为交流主网提供快速频率支撑,同时保证换流站之间合理的功率分配。首先,引入了网络图论的概念,设计了MAS的最优通信拓扑结构,使其动态响应速度达到最快。在此基础上,为换流站设计了分布式频率支撑模块,使VSC-MTDC系统在交流电网因扰动而出现频率跌落时,能够提供快速功率支撑,抑制频率跌落。本文通过陆地侧换流站GSVSC(Grid-Side VSC) Agent间频率差的传递,对其各换流站的功率输出实施控制,以实现系统频率支撑。同时,提出了一种基于负载率信息的Agent控制器,通过换流站之间有功功率再分配,防止换流站重载甚至过载。然后,构建了完整的MAS控制策略,详细分析了频率支撑Agent FSA(Frequency Support Agent)和功率分配Agent PAA(Power Allocation Agent)的配合控制问题,控制器通过监测频率变化幅度自适应地调整功率再分配系数,以保证在实现GSVSC负载率均匀分配的同时,又能为系统的交流电网频率提供有效的支撑。最后在DIgSILENT/PowerFactory环境下搭建了一个典型的六端VSC-MTDC系统,其中包括详尽的MAS模型,通过仿真验证了所提控制策略的有效性。
1 VSC-MTDC系统的控制策略
1.1 海上风电场换流站的传统控制策略
海上风电场可被看作一个弱交流电网,需要通过风电场侧换流站WFVSC(Wind Farm-side VSC)对风电场提供电压和频率支撑。WFVSC的经典控制框架如图1所示。

图1 WFVSC控制框架Fig.1 Control diagram of WFVSC
电压外环控制、电流内环控制是WFVSC常采用的控制方法。在电压外环控制中,首先比较换流站交流母线电压幅值Vac与其参考值Vac_ref的偏差量,通过PI控制可以得到dq同步旋转坐标系下q轴电流参考值iq_ref。测量电压源型换流器交流侧电流iabc,并将其转换至dq同步旋转坐标系下,将q轴电流值iq与其参考值作差,通过PI控制得到相应的控制信号,最后产生脉宽调制(PWM)波[10-11]。
1.2 GSVSC传统下垂控制策略
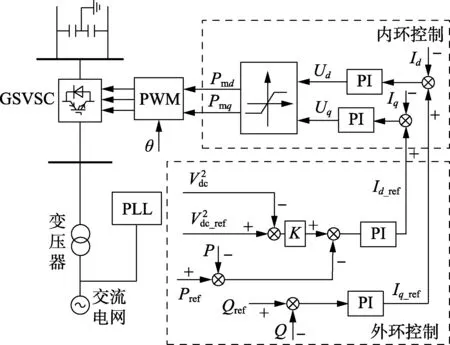
图2 传统下垂控制策略框图Fig.2 Block diagram of traditional droop control strategy
GSVSC常采用直流电压下垂控制。传统下垂控制的控制框架如图2所示。当VSC-MTDC系统输入和输出功率不平衡时,将导致各换流站直流母线电压发生改变,根据有功功率和直流电压的下垂关系,控制器可以根据直流电压偏差量调整有功功率,以此稳定VSC-MTDC的直流电压[12]。传统下垂控制的电压-功率关系为:
(1)
其中,K为电压-功率下垂系数;Vdc_ref、Vdc分别为换流站直流侧电压的参考值、实际测量值;Pref、P分别为流入换流站有功功率的参考值、实际测量值。根据式(1)可知,GSVSC之间的功率分配由下垂系数决定。
传统的VSC-MTDC系统控制策略仅考虑直流电网本身的安全稳定运行,未能考虑其对交流电网产生的影响。由于电压源型换流器具有灵活的功率调节能力,在传统控制策略的基础上,可进一步开发针对交流电网的频率支撑功能。MAS具有自治性、反应性等优点,其分布式控制思想与智能电网的发展趋势相契合,本文基于MAS设计了适用于VSC-MTDC系统的并网控制策略。
2 基于MAS的换流站控制器设计
2.1 Agent简介及其应用
Agent是一个信息交流的实体,MAS包括了2个甚至更多的Agent。当系统运行状态发生变化时,Agent能够及时感知自身的状态变化,并与相邻Agent通信,根据本地与邻居Agent的量测信息采取相应的调整措施,最终实现了整个系统的优化控制。
在含有VSC-MTDC的交直流混联系统中,当交流系统发生发电机停运、负荷突增等事件时,会导致电网功率失衡,进而引发频率偏移。而各个换流站可通过控制有功功率的输出,为交流电网提供频率支撑。每个Agent仅测量本地的频率偏差,通过通信网络将该偏差信号传输给相邻Agent,同时接收邻居Agent的频率偏差信号,综合考虑本地频率偏差、邻居的频率偏差信号,调整换流站的输出功率,以达到频率支撑的目的。同时Agent通过相互传递负载率差值进一步调整功率以保证系统功率的合理分配。
本文基于上述思想达到频率支撑和功率分配的效果,为了方便起见,将MAS控制系统中提供频率支撑作用的Agent称为FSA,而提供调整功率使系统合理分配功率功能的Agent简称为PAA。
2.2 MAS通信拓扑设计
MAS的通信网络拓扑通常可采用图论来分析。假设MAS中各Agent连接的拓扑结构图用G={V,E}表示,其中V中元素代表图G的节点,而E中元素则代表边[13-14]。在一个无向图G中,用(Vi,Vj)表示节点Vi和Vj之间是相连的,每个节点代表每个Agent所处的位置,若两节点有边连接,则代表Agent间有信息传递。可以用邻接矩阵A=[aij]描述连通图G中的节点连接情况,对角矩阵D=[dii]。其中aij和dii定义如下:
(2)
dii=d(Vi)
(3)
其中,d(Vi)为节点Vi的入度。根据各Agent之间的连接情况,可分别求得相应的对角矩阵D和邻接矩阵A,对其作差可得到对应的拉普拉斯矩阵L:
L=D-A
(4)
由文献[15]可知该拉普拉斯矩阵L仅有一个特征值为0,其他特征值均为可随拓扑改变而变化的正值,所有特征值可以表示为:
0=λ1≤λ2≤…≤λn
(5)
在一致性算法下,Agent的状态模型可以用矩阵表示,整个系统可以表示为:

(6)

e-L(G)t=e-(UΛUT)t=Ue-ΛΛ(G)UT=
(7)
其中,Λ为特征值所构成的对角矩阵;矩阵U由矩阵L的规范正交化向量组成;u1、u2、…、un分别为对应特征值λ1、λ2、…、λn的特征向量。
本文针对VSC-MTDC系统的4个GSVSC设计了MAS控制系统的通信拓扑结构,图3为4种典型通信拓扑结构,各拓扑结构的特征参数见表1。

图3 MAS通信拓扑结构Fig.3 Communication topologies of MAS
本文设计的通信网络拓扑结构如图3(a)所示,该拓扑结构下λ2比较大,系统的动态响应最快。
2.3 具有频率支撑功能的Agent控制器
VSC-MTDC可实现有功、无功功率的解耦控制,根据该特性可为VSC-MTDC系统设计频率支撑功能。交流系统中,同步发电机的转子运动方程如下:
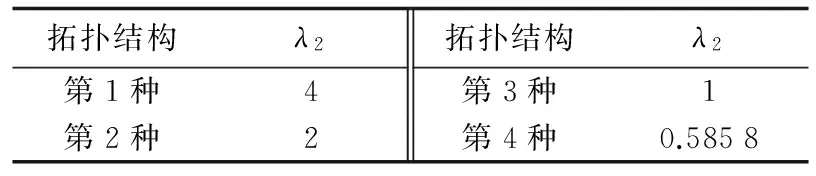
表1 各拓扑结构的特征参数Table 1 Characteristic parameter of each communication topology
(8)
其中,H为同步发电机的惯性时间常数;PT和PE分别为同步发电机的机械功率和电磁功率;fN为交流系统的额定频率;f为交流系统的实测频率;上标“*”表示量纲采用标幺值形式。
由式(8)知,若电网有功功率需求增加,这时需要发电机输出更多的有功功率,进而导致输出电流、电磁转矩增大,若机械转矩保持不变,就会导致同步发电机转速发生变化,从而使整个系统的频率下降。
直流系统中可以用直流母线电压表示系统功率平衡,可得:
(9)

考虑换流站交流、直流接口处的功率动态平衡,交流侧功率的缺额可由直流侧功率补偿,令式(8)、(9)相等并对两边积分可得[17]:
(10)
于是可得换流站两侧频率与电压的关系为:
(11)
其中,Kw为交直流系统V2-f下垂系数,其值等于4HSN/(CdcfN)。
假设每个换流站交流侧频率的测量值为f,而系统频率的参考值为fref,则换流站频率的变化为:
Δf=f-fref
(12)
WFVSC采用传统的控制方式,而GSVSC均配有FSA实时监控本地交流电网的频率偏差量。当VSC-MTDC所连接的某交流电网频率偏移量Δf超过阈值Δfthre时,换流站i的FSA启动。换流站i与其邻居换流站进行通信,比较本地频率偏移量与相邻换流站所采集的频率偏移量的差值,并计算所有偏差值的均值,即:
(13)
其中,Ni为换流站i的邻居换流站集合;N为与换流站i有通信的换流站个数。进一步综合式(11)和式(13)可以得到:
(14)
于是,可得直流电压参考值的调整量ΔVdc_ref,将其送至电压-功率下垂控制环节中,最终可得到整个换流站的有功功率调整量ΔPag为:
(15)
其中,ΔVdc_ref为通过FSA控制所得到的直流电压参考值的变化值。
最后通过限幅环节后将计算的功率调整量送至有功功率控制环节。
2.4 具有负载率调节功能的Agent控制器
换流站之间功率的不合理分配可能会导致换流站重载甚至过载,这会影响设备的使用寿命,甚至会威胁系统的安全稳定运行。因此保证各换流站的负载率处于正常范围对VSC-MTDC系统的安全稳定运行至关重要。
为了使系统功率分配的合理性得到定量分析,用参数Δδ表征换流站间负载率之差:
(16)

本节根据各GSVSC的负载率之差Δδ对输出功率进行调整。PAA实时监测本地换流站功率的负载率,同时与其他PAA相互通信,获取邻居换流站的负载率信息,求取本换流站与邻居换流站负载率差额的平均值,即:
(17)
根据负载率差值的平均值调整本换流站系统功率流动以保证换流站功率的合理分配。正常运行时换流站所分担的功率缺额应该与其额定容量呈正相关关系,所以应该按照换流站的额定容量设定调整系数Kt来对系统功率进行再分配:
(18)
其中,ΔPt为功率调节量;Kt为调节系数。这样,当某个换流站退出多端系统时,系统的功率缺额就可以由其他换流站按各自的额定容量分配,同时又避免了换流站出现过载的情况。
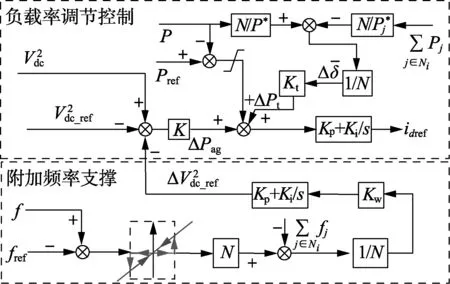
图4 FSA与PAA控制框架图Fig.4 Control block digram of FSA and PAA
2.5 分析FSA与PAA的配合控制问题
FSA与PAA的控制框架如图4所示。值得注意的是,当交流电网因扰动发生频率偏移时,FSA参与系统调频过程中每个换流站应当承担的功率缺额补给量不同,但PAA为了防止换流站的过载再次调整了功率的分配。因此,PAA对系统频率的恢复可能会造成不利的影响,PAA控制器可使调节系数Kt随着频率的变化幅度做出相应的调整,如式(19)所示,这样就缓和了PAA对FSA控制效果的影响。
(19)
其中,K1为频率偏差绝对值小于df1的功率调节系数;K2为频率偏差绝对值不小于df1、不大于df2的功率调节系数,并且满足K1>K2>0。

3 仿真结果与分析
为了验证本文所提控制策略的有效性,基于DIgSILENT/PowerFactory软件搭建了如图5所示的六端VSC-MTDC系统仿真模型。系统各项参数和控制器参数分别如附录A中表A1、A2所示。

图5 六端VSC-MTDC系统模型Fig.5 Model of six-terminal VSC-HVDC system

图6 不同通信拓扑结构下的系统频率Fig.6 System frequency under different communication topologies
图5中,风电场侧换流站WFVSC1、WFVSC2采用传统的定交流电压定频率控制,陆地侧换流站GSVSC1、GSVSC2、GSVSC3、GSVSC4采用下垂控制,所有GSVSC均装有FSA和PAA控制器,各个换流站频率Agent信息交流的连接采用如图3(a)所示的通信网络拓扑结构。
3.1 通信拓扑结构的比较
以短路事件为例,1s时设置2区4机系统中线路L1发生短路,单独开启FSA,通过仿真观察不同通信拓扑结构时2区4机系统的频率支撑效果,如图6所示。由图6可知,采用图3(a)所示通信拓扑结构时系统最易于实现频率稳定。
通过仿真可以看出,当图3(a)所示通信拓扑下系统频率达到稳定时,其他拓扑结构下的系统频率仍有较大的波动。通过仿真数据得到各种拓扑下的频率稳定所需时间,如表2所示。由表2可以看出,本文设计的通信拓扑下频率稳定所需的时间最短,系统频率的收敛速度最快。

表2 不同通信拓扑结构下频率稳定所需时间Table 2 Time required for frequency stability under different communication topologies
3.2 负荷事件
在3.1节研究内容基础上,进一步研究负荷突变时MAS控制策略的频率支撑、负载率调节效果。
为了验证FSA控制的有效性,预设MAS控制系统中PAA退出运行,设置FSA正常运行和退出运行2种情况。传统下垂控制与配备FSA的系统频率如图7所示。通过对比发现,传统下垂控制比开启FSA控制时的系统频率支撑效果差。

图7 传统下垂控制与配备FSA的系统频率Fig.7 System frequency of traditional droop control strategy and control strategy equipped with FSA
由图7可见,采用FSA后2区4机系统、IEEE 39节点系统的频率变化值均能稳定在0.12Hz范围内,而传统下垂控制下2区4机系统频率跌落则达到0.28Hz。因此FSA控制下的频率支撑效果良好。
在实现频率支撑的同时,需要调整系统功率的再分配,以避免换流站的有功功率过大出现过载的情况,换流站根据自身的额定容量,自适应地分配有功功率。为了验证PAA控制系统的有效性,在负荷事件中保证MAS控制系统中的FSA均能正常运行,设置PAA正常运行和退出运行2种情况。2种情况下的GSVSC的负载率如图8所示。

图8 2种情况下GSVSC的负载率Fig.8 Load rate of GSVSC in two cases
对比发现,当PAA正常运行时,GSVSC1、GSVSC2的负载率均降低;而GSVSC3、GSVSC4的负载率则均有所增加。由此可见PAA控制有效地规避了无PAA情况下可能出现的换流站过载情况,并合理利用了换流站的容量。
对单独运行FSA与同时运行FSA和PAA进行比较,可以发现MAS加入PAA后的功率再分配对FSA频率支撑的效果有一定的影响。
为了解决该冲突,Agent可根据频率变化情况及时对调节系数Kt做出调整。调节Kt后的频率支撑效果如图9所示。由图9可以看出Kt的调整降低了PAA的功率再分配对FSA频率支撑效果的影响。

图9 调节Kt后的频率支撑效果Fig.9 Frequency support effect after adjusting Kt

图10 配备FSA与传统下垂控制策略的系统频率Fig.10 System frequency of traditional droop control strategy and control strategy equipping with FSA
3.3 故障退出事件
N-1原则是多端系统需达到的基本要求,当某个换流站出现故障时,系统仍能保持安全稳定运行。1s时设置故障事件,GSVSC4突发故障而中断运行使其有功功率为0。故障事件导致系统交流侧的频率发生变化,各换流站会重新调整有功功率流动。
图10比较了GSVSC4突发故障退出运行时,在保证PAA退出运行的前提下,采用FSA和采用传统下垂控制策略2种情况下2区4机系统和IEEE39节点系统的频率支撑效果。MAS中FSA正常运行时能有效地提供频率支撑,而未采用FSA仅在传统下垂控制策略下的系统频率则变化很大。
同样地,为了体现MAS控制中PAA的控制效果,在保证FSA正常运行前提下,设定了有/无PAA控制系统的2种情况,通过系统功率响应体现PAA的控制功能,结果如图11所示。

图11 有/无PAA时GSVSC的负载率Fig.11 Load rate of GSVSC with and without PAA
由图11可见,GSVSC1、GSVSC2的负载率分别增加了约0.04、0.03,而GSVSC3的负载率则减少了约0.07,避免了过载。仿真结果表明,本文所提控制策略通过实时跟踪本地和其他换流站的负载率变化情况,通过重新调整功率流动,使剩余换流站按额定容量重新分配了功率。
若对电网频率要求较高,为了防止PAA对FSA频率支撑效果的影响,Agent可根据频率变化情况调整Kt。调节Kt后的频率支撑效果见图12。从图12可看出,Kt的调整缓和了功率再分配对频率支撑的影响,保证了PAA和FSA各自的控制效果良好。

图12 调节Kt后的频率支撑效果Fig.12 Frequency support effect after adjusting Kt
4 结论
本文提出了一种基于MAS理论的VSC-MTDC系统分布式协同控制策略,该策略综合考虑了交流侧电网频率、换流站的负载率因素,能够使VSC-MTDC系统为交流电网提供快速频率支撑,同时保证换流站功率的合理分配。本文详细研究了MAS通信网络拓扑结构对控制效果的影响,并根据图论算法设计了最优网络拓扑的求取方法。MAS控制系统采用分布式控制方式,各Agent仅需监测本地系统参量,并与相邻的Agent进行通信,在此基础上,FSA和PAA子模块将根据测量信号分别进行频率支撑和功率分配控制。本文提出的控制策略既能保证VSC-MTDC的稳定运行,又能在系统出现故障时提供必要的辅助支撑,有效地提高了交直流混联电网的安全稳定性。
附录见本刊网络版(http:∥www.epae.cn)。
参考文献:
[1] 闫文宁,李可军,王卓迪,等. 基于附加有功信号的VSC-MTDC系统平衡控制策略[J]. 电力自动化设备,2016,36(2):32-39.
YAN Wenning,LI Kejun,WANG Zhuodi,et al. Srategy of balanced control based on additional active power signal for VSC-MTDC system[J]. Electric Power Automation Equipment,2016,36(2):32-39.
[2] 吴金龙,刘欣和,王先为,等. 多端柔性直流输电系统直流电压混合控制策略[J]. 电网技术,2015,39(6):1593-1599.
WU Jinlong,LIU Xinhe,WANG Xianwei,et al. Research of DC voltage hybrid control strategy for VSC-MTDC system[J]. Power System Technology,2015,39(6):1593-1599.
[3] 彭衍建,李勇,曹一家. 基于VSC-MTDC的大规模海上风电并网系统协调下垂控制方法[J]. 电力自动化设备,2016,36(8):16-25.
PENG Yanjian,LI Yong,CAO Yijia. Coordinated droop control for large-scale offshore wind farm grid-connected based on VSC-MTDC system[J]. Electric Power Automation Equipment,2016,36(8):16-25.
[4] 唐庚,徐政,刘昇,等. 适用于多端柔性直流输电系统的新型直流电压控制策略[J]. 电力系统自动化,2013,37(15):125-132.
TANG Geng,XU Zheng,LIU Sheng,et al. A novel DC voltage control strategy for VSC-MTDC systems[J]. Automation of Electric Power Systems,2013,37(15):125-132.
[5] HAILESELASSIE T M,MOLINAS M,UNDELAND T. Multi-terminal VSC-HVDC system for integration of offshore wind farms and green electrification of platforms in the North Sea[J]. Proceedings of the Nordic Workshop on Power & Industrial Electronics,2008(2):1-8.
[6] 阎发友,汤广福,贺之渊,等. 基于MMC的多端柔性直流输电系统改进下垂控制策略[J]. 中国电机工程学报,2014,34(3):397-404.
YAN Fayou,TANG Guangfu,HE Zhiyuan,et al. An improved droop control strategy for MMC-based VSC-MTDC systems[J]. Proceedings of the CSEE,2014,34(3):397-404.
[7] 付媛,王毅,张祥宇,等. 多端电压源型直流系统的功率协调控制技术[J]. 电力自动化设备,2014,34(9):130-136.
FU Yuan,WANG Yi,ZHANG Xiangyu,et al.Coordinated power control of VSC-MTDC system[J]. Electric Power Automation Equipment,2014,34(9):130-136.
[8] CHAUDHURI N R,CHAUDHURI B. Adaptive droop control for effective power sharing in Multi-Terminal DC(MTDC) grids[J]. IEEE Transactions on Power Systems,2013,28(1):21-29.
[9] 吴俊宏,艾芊,章健,等. 基于多代理技术的VSC-MTDC控制系统[J]. 电力系统自动化,2009,33(19):85-89.
WU Junhong,AI Qian,ZHANG Jian,et al. A VSC-MTDC control system based on multi-agent technology[J]. Automation of Electric Power Systems,2009,33(19):85-89.
[10] LIANG J,JING T,GOMIS-BELLMUNT O,et al. Operation and control of multiterminal HVDC transmission for offshore wind farms[J]. IEEE Transactions on Power Delivery,2011,26(4):2596-2604.
[11] WANG W,LI Y,CAO Y,et al. Adaptive droop control of MTDC system for frequency support and power sharing[J]. IEEE Transactions on Power Systems,2017,33(2):1264-1274.
[12] 王炜宇,李勇,曹一家,等. 基于虚拟调速器的MTDC虚拟同步机控制策略[J/OL]. 中国电机工程学报. [2017-07-27]. http:∥kns.cnki.net/kcms/detail/11.2017.TM.20170727.1652.009.html.
WANG Weiyu,LI Yong,CAO Yijia,et al. The virtual synchronous generator technology based on virtual governor for MTDC system[J/OL]. Proceedings of the CSEE. [2017-07-27]. http:∥kns.cnki.net/kcms/detail/11.2017.TM.20170727.1652.009.html.
[13] BABAZADEH D,NAZARI M,FIDAI M H,et al. Implementation of agent-based power flow coordination in AC/DC grids using co-simulation platform[C]∥IEEE International Conference on Smart Grid Communications. Venice,Italy:IEEE,2015:188-193.
[14] OLFATI-SABER R,FAX J A,MURRAY R M. Consensus and coope-ration in networked multi-agent systems[J]. Proceedings of the IEEE,2007,95(1):215-233.
[15] MESBAHI M,EGERSTEDT M. Graph theoretic methods in multi-agent networks[M]. Princeton,New Jersey,America:Princeton University Press,2010:44-50.
[16] NORDSTRÖM L,BABAZADEH D. Cyber physical approach to HVDC grid control[M]. Berlin,Germany:Springer Berlin Heidelberg,2015:89-91.
[17] ZHU J,BOOTH C D,ADAM G P,et al. Inertia emulation control strategy for VSC-HVDC transmission systems[J]. IEEE Transactions on Power Systems,2013,28(2):1277-1287.
