基于ROBCAD高速传输抓取装置的运动仿真
2018-05-16王德民赵国法
王德民, 赵国法
(长春理工大学机电工程学院,长春 130022)
0 引 言
高速传输抓取装置常用于发传厂,用来高速抓取传送发动机或传动器的小体积零件以减少生产辅助传输时间,可以有效地降低生产成本。随着焊装生产线传输方式日新月异,不断地发展,具有传输速度快、位置准确、节省辅助传输时间等特点的高速传输抓取装置越来越多地被用于焊装的传输生产线中,应用于地板、侧围、分装等产品零件的传输[1],有利于提升焊装生产线的设计水平,提高生产效率,降低汽车生产成本,有利于提高我国汽车市场竞争力。
ROBCAD软件的广泛应用符合世界自动化生产的发展趋势,在实际应用中其有着如下优点:1)提高机器人运行程序的准确性,减少现场调试时间;2)优化运动轨迹,便于方案设计,减少资源浪费;3)加速产品投产时间;4)减少劳动力,资源分配及利用合理。
ROBCAD基本功能如下[2]:1)工作单元布局设计和建模;2)机器人仿真;3)CAD数据转换;4)冲突检测;5)操作顺序(SOP);6)离线编程(OLP)。
由于设计过程中可能存在的偏差会延长整个装置整机调试的时间,加剧调试难度,因此需要在设计结束后使用虚拟仿真平台对装置做出运动学仿真,来提前发现设计中存在的缺陷。提前解决设计中的缺陷可以有效地节约成本、减少人力、物力资源的浪费等问题,因此运动仿真是机械设计的一个必备的过程。对于虚拟仿真平台,本项目采用ROBCAD软件,来对高速传输抓取装置所涉及项目中的6台机器人的工位布局、工艺可行性和冲突检测等方面进行设计验证[3]。
仿真过程可以简要地概括为3个阶段:第一个阶段是数据输入阶段;第二个阶段是仿真阶段;第三个阶段是数据输出阶段。仿真的具体过程如图1所示[4]。

图1 ROBCAD仿真流程图
1 高速传输抓取装置的工艺规划过程分析及建模
高速传输抓取装置在焊装生产线中是一整套相对对立的装备系统,包括规划、结构设计两个阶段,规划设计包括整体的长宽高、传输抓取单元的数量、围栏、踏台、维修楼梯的相对位置;结构设计包括立柱、横梁、举升单元、传输单元、抓取装置的细节设计,同时还要选取举升和传输的伺服电动机的功率、传动比,对横梁及立柱整体进行有限元分析。
基于C011-A级车的地板-主焊线的新制项目中地板线的工位间传输采用了高速传输抓取技术。高速传输抓取装置一般由支撑框架、升降机构、水平移动机构、抓具等组成,如图2所示。以下就以此项目为例详细介绍高速传输抓取装置的抓取传输过程:1)高速传输抓取装置数量及工位间距。4工位共有3套举升机构、3套平移传输机构和3套抓具,工位间距6 m。2)高速传输抓取装置的升降距离。将每个工位的机器人轨迹进行初步模拟,确定升降距离1500 mm。3)高速传输抓取装置的工作循环过程。下降→抓取→上升→前进平移→下降→放件→上升→返回平移(中位),其中下降及上升距离1500 mm,前进平移距离6000 mm,返回平移3000 mm。4)高速传输抓取装置的工作循环时间:根据每个工位焊接点数的分配及时间汇总,高速传输抓取装置整个的传输时间必须保证在16 s以内。

图2 高速传输抓取装置
根据以上技术参数及工艺条件,我们初步确认高速传输抓取装置平面占用空间、立柱数量及立柱位置,图3是初步规划的平面布置图,面积24×3.5 m2。
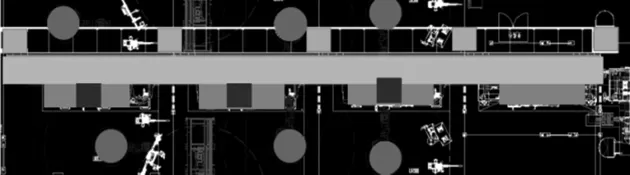
图3 规划平面布置图
2 夹紧装置的运动仿真
夹紧装置的特点是结构简单、动作迅速,仅需几秒钟就可以从松开状态完成夹紧。夹紧装置具体结构如图4所示。
夹紧缸也称夹紧器。在自动化生产环节中,抓具的抓取动作由夹紧气缸来完成,而夹紧气缸的动作不会对工件数模的生产制造产生除保证加工精度和产品质量之外的其他积极影响。夹紧气缸的功用主要为:保证工艺过程的可靠性;保证质量控制的安全性;保证有序的自动化动作。
使用ROBCAD对夹紧装置进行运动仿真,一共分为6个步骤:
1)定义项目路径,进入 Modeling模块,调入需要运动仿真的夹紧装置,如图5所示。
2)使用Kinematics运动仿真模块创建2个Link,一个是活动部件的Link,另一个是固定部件的Link。其中活动部件包括:气缸压臂、压紧块;固定部件包括:气缸主体、连接块、方钢。

图4 夹紧装置
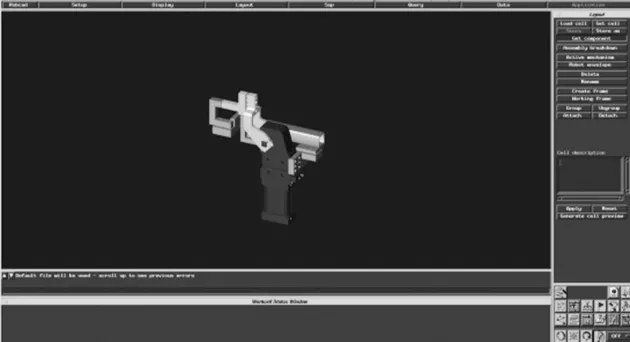
图5 夹紧装置
3)创建夹紧装置运动的旋转轴。旋转轴位于气缸主体与气缸压臂的连接处,用“Axis”点击两侧凸台处,中心点自动选取,旋转轴创建成功。
4)创建关节。使用“Joint”命令依次选取固定部件、活动部件及旋转轴,最后对关节进行定义。
5)创建动作。需要编辑2个状态,一个是“OPEN”状态,另一个是“CLOSE”状态。“OPEN”状态需要活动部件绕旋转轴旋转90°;“CLOSE”状态需要活动部件绕轴回到初始状态。如图6、图7所示。
6)动作仿真。在经过上面的步骤之后,夹紧装置的运动仿真完成。仿真运动过程如图8所示。
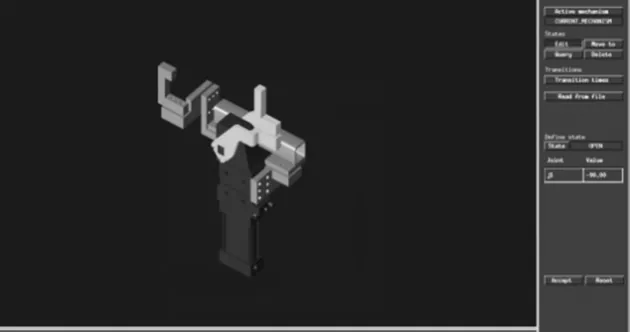
图6 夹紧装置的“OPEN”状态
抓具的抓取动作其实是由4个夹紧气缸完成的,而这4个气缸的类型与型号是一致的,因此动作顺序也是一致的。上文简要描述了气缸的动作顺序,并结合ROBCAD软件做出了仿真动作过程。再结合直线气缸的直线运动,就组成了抓具的抓取动作。

图7 夹紧装置的“CLOSE”状态

图8 夹紧气缸仿真运动过程
3 高速传输抓取装置运动仿真
在完成上面的工作后,需要对工位任务分配、机器人选型和机器人LAYOUT设计、干涉校核,最后对高速传输抓取装置进行运动仿真。仿真过程如图9、图10所示。
通过上述内容的仿真分析,高速传输抓取装置可以满足工艺及生产要求,能够高速稳定安全运行,同时能够减少生产辅助传输时间,降低汽车开发成本,提高生产效率。
经过结构加工、装置调试等一系列过程后,高速传输抓取装置已经在某轿车焊装车间中投入使用。装置现场工作如图11所示。
由图11能够明显看出抓具、升降机构、平移机构和部分支撑框架等结构。
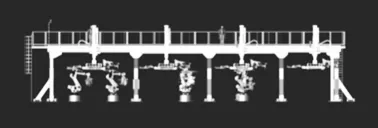
图9 高速传输抓取装置三维布局

图10 高速传输抓取装置运动仿真
4 结语
结合某车型地板焊装线的实例,以高速传输抓取装置为模型,通过ROBCAD软件完成对其的运动仿真。由仿真可知,高速传输抓取装置的机械结构能够满足运动性能要求,且整体机构在运行过程中不会出现干涉等情况的发生。这些数据能够说明高速传输抓取装置结构设计合理,满足工艺和生产要求。

图12 高速传输抓取装置现场工作图
[参考文献]
[1] 许瑞麟,朱品朝,于成哉,等.汽车车身焊接技术现状及发展趋势[J].电焊机,2010(5):1-18.
[2] 魏振红,俞港,付庄.基于RobCAD软件的焊接机器人离线编程[J].机电一体化,2015(3):31-34.
[3] 林巨广,崔鹏,王健强.基于ROBCAD的白车身焊装自动线工艺规划技术研究[J].合肥工业大学学报(自然科学版),2009(9):1365-1369.
[4] 崔鹏.基于ROBCAD的焊装线三维建模、仿真与评价方法研究[D].合肥:合肥工业大学,2009.
[5] 李纯,朱浮生.构造版独立基础地基反力测试[J].辽宁工程技术大学学报,2006(2):220-222.
[6] 博瑞斯,张建平.工程力学中的弹性理论[M].北京:航空工业出版社,2010.
[7] 李学军,刘义伦,朱萍玉.复杂载荷变刚度静不定梁通用模型[J].机械设计,2002(5):74-77.
[8] 熊晓萍,李春植,金权东.基于虚拟制造装配环境的汽车焊装线设计[J].机械加工与自动化,2004(3):2-4.
[9] 邓仕珍,范淼海.汽车车身制造工艺学[M].北京:北京理工大学出版社,2002:109.
[10]崔鹏.基于ROBCAD的焊装线三维建模、仿真与评价方法的研究[D].合肥:合肥工业大学,2009.
[11] 杜辉.白车身焊装技术研究[D].合肥:合肥工业大学,2007.
[12]马永康.基于虚拟制造的轿车白车身焊装线仿真与规划[D].成都:电子科技大学,2008.
[13] 严隽琪.虚拟制造的理论、技术基础与实践[M].上海:上海交通大学出版社,2003.
[14] 陈阳.白车身焊接机器人工位规划的仿真及优化[D].上海:同济大学,2004.
[15] 曾魁.基于数字化工厂的车身地板焊装线工艺规划与仿真[D].大连:大连交通大学,2011.
