基于滑模观测器的车辆质心侧偏角估测
2018-05-14彭博张缓缓肖文文轩飞虎
彭博 张缓缓 肖文文 轩飞虎

摘要:在汽车稳定性控制中,车辆质心侧偏角是一个重要的参数,直接测量其大小费用昂贵。为研究车辆质心侧偏角,以非线性魔术轮胎模型和二自由度模型为基础,以模型输出的横摆角速度为反馈量,建立滑模观测器,估算车辆质心侧偏角。引入饱和函数为切换函数,减少由符号函数引起的抖振。在Carsim平台建立整车模型以及高附着系数、低附着道路模型,利用Marlab/Simulink模块建立观测器模型,两者联合仿真。通过与龙贝格观测器估算质心侧偏角方法比较,滑模观测器在轮胎处于线性和非线性区域时估算结果更准确。
关键词:质心侧偏角;滑模观测器;魔术轮胎模型;非线性模型;仿真
文献标志码:A 文章编号:1674-5124(2018)05—0043-06
0引言
随着汽车的拥有量增多,人们对汽車的稳定性也提出了更高的要求。一些提高稳定性的方法也已经得到了广泛的使用,如汽车稳定性控制系统(electronic stability control,ESC)、四轮转向系统(four-wheel steering,4WS)等。
在稳定性控制算法中,横摆角速度和质心侧偏角是两个重要参数,通过控制各车轮上的转矩和轮胎力使车辆的横摆角速度和质心侧偏角保持在安全范围内。其中质心侧偏角可以通过传感器、GPS等直接测量。但这些方法费用昂贵,只适用于试验车型,难以在量产车型上使用。国内外许多专家学者从操作便捷性和节约成本方面考虑,提出了很多估测质心侧偏角的方法。
文献采用了经典卡尔曼滤波法,对质心侧偏角进行估测,当轮胎处于线性阶段时,估测效果较好。文献运用扩展卡尔曼滤波方法对质心侧偏角进行估测,无论轮胎在线性和非线性区域内估测结果实时性好,采用非线性轮胎模型比线性轮胎模型精度高。文献指出在同等条件下无迹卡尔曼滤波算法的估计精度略高于常用的扩展卡尔曼滤波算法,而所花费的运算时间大约只有扩展卡尔曼滤波算法的50%。文献采用了神经网络方法,该方法为非线性算法,维数较多,运算复杂。文献提出了扩张状态观测器方法,文献设计了有限时间收敛观测器,提高了质心侧偏角估计实时性和易实施性。文献采用龙贝格状态观测器方法,对车辆在极限工况下的质心侧偏角进行估测,该方法估测精确但不利于提高算法实时性。
本文提出一种基于滑模观测器的车辆质心侧偏角估测方法。以非线性魔术轮胎模型和二自由度单轨模型为基础,建立滑模观测器,对观测器的能观性以及收敛性进行证明。引入饱和函数为切换函数,减少由符号函数引起的抖振。采用Carsim和Matlab/Simulink联合仿真,通过与龙贝格状态观测器对比,验证了估测方法的准确性和实时性。
1车辆模型
1.1轮胎模型
当汽车侧向加速度不超过0.4g时,汽车的运动状态处于线性关系,此时轮胎侧偏角α与轮胎侧向力Fy也呈线性关系如下式:
Fy=k·α (1)式中k为侧偏刚度。
当轮胎侧向力接近饱和时,轮胎侧偏角与轮胎侧向力呈非线性关系。因此,对质心侧偏角进行估测时,选用非线性轮胎模型。为此选用“魔术公式”轮胎模型,该模型可以表达出轮胎的各向力学特性,统一性强,其形式如下:
Fy=Dsin{Carctan[Bα-E(Bα-arctanBα)]} (2)式中:D——峰值因子:
C——形状因子:
B——刚度因子:
E——曲率因子。
1.2二自由度车辆模型
在对车辆质心侧偏角估测时,采用如图1所示的简化的二自由度车辆模型,忽略悬架的作用,汽车沿X轴的前进速度U视为不变,只考虑沿Y轴的侧向运动和绕Z轴的横摆运动。模型中所涉及的变量及物理意义如表1所示。
根据该模型可以写出二自由度模型的运动方程如下式所示:
2滑模观测器
2.1二自由度车辆模型能观性
为了验证车辆质心侧偏角的能观性,将式(3)转化为如式(4)的状态空间模型:
根据滑模控制理论,当系统全局(或局部)能观,才能使用滑模观测器技术。根据式(3)描述的非线性系统,其能观性矩阵为
当矩阵Q满秩,可认为系统可观。结合式(3)和表2车辆模型参数可知,式(5)矩阵的秩为2,因此通过滑模观测器估测质心侧偏角是可行的。
2.2观测器构建
考虑到在实际测量过程中,横摆角速度和侧向加速度可以通过传感器方便的测出。因此可将式(3)改写为
选择观测误差为滑模面,通过设计观测器的增益来使误差动态能到达并维持在滑模面上,所设计的滑模观测器如下式:
2.3选择切换函数
由于时间滞后、空间滞后及系统惯性等影响,滑模系统容易出现抖振现象㈣。传统的滑模观测器选用符号函数作为切换函数,切换动作不是正好发生在切换面上,这将大大增加误差。为了消除抖振影响,本文选取饱和函数作为切换函数,如下式所示:
由图可以看出,传统的符号函数只能在±1之间来回切换,从而引入较快的抖振,而采用饱和函数后,当误差在0附近时,使切换面变为一个连续的函数,从而能抑制抖振的影响。因此,选择饱和函数作为切换函数。
2.4观测器收敛性证明
为了验证观测器的横摆角速度观测值是否收敛于真实值,对观测误差取Lvapunov函数为
由于转向盘通过转向系统与前轮刚性相连,因此可以通过转向盘转角度传感测量出车辆在行驶时的角度,然后根据角传动比换算为前轮转角。
侧向加速度可以通过加速传感器测量,加速度传感器体积小,安装方便,在车辆上已普遍采用。
对于纵向车速的估测,国内外技术都已成熟。目前,主要采用轮速传感器和加速度传感器来估计纵向车速,根据车辆行驶状态,对两传感器的输入信号进行不同权重的调整,最终估计的纵向车速为
随着半导体技术的发展,横摆角速度传感器的价格降低了许多,但一般用在中高级轿车中。低级轿车采用的普通横摆角速度传感器存在标定误差和温度漂移等问题。通常采用轮速传感器和质心处的侧向加速度传感器的方案来估测横摆角速度,估计算法如下式:
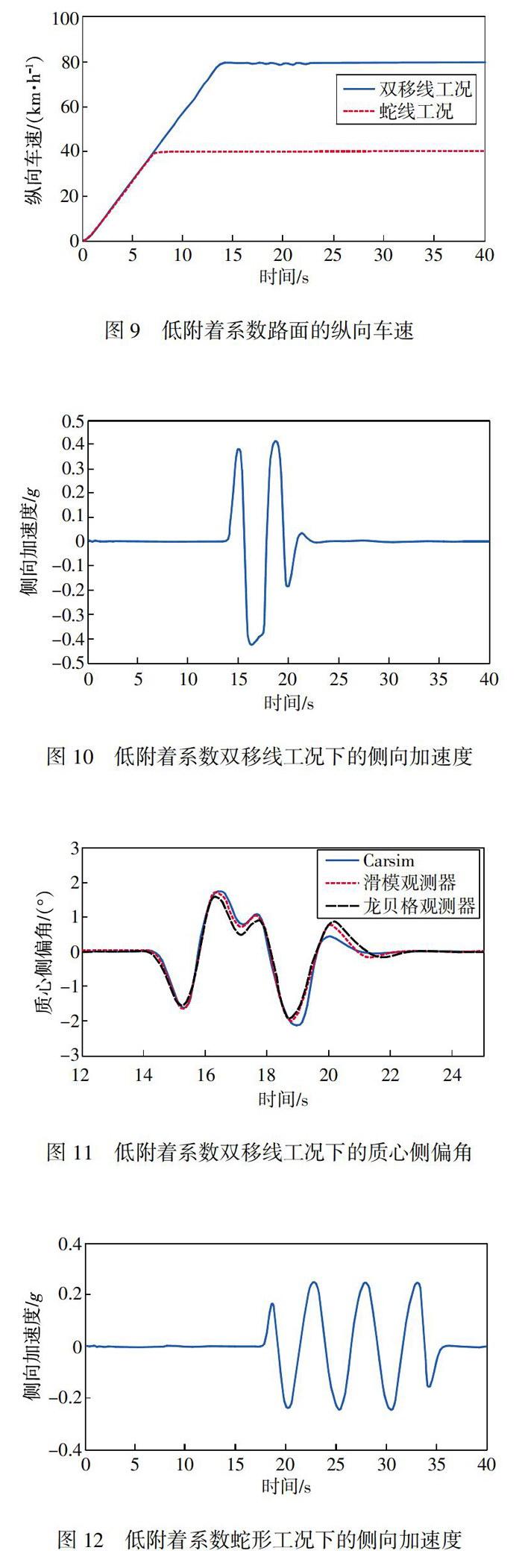
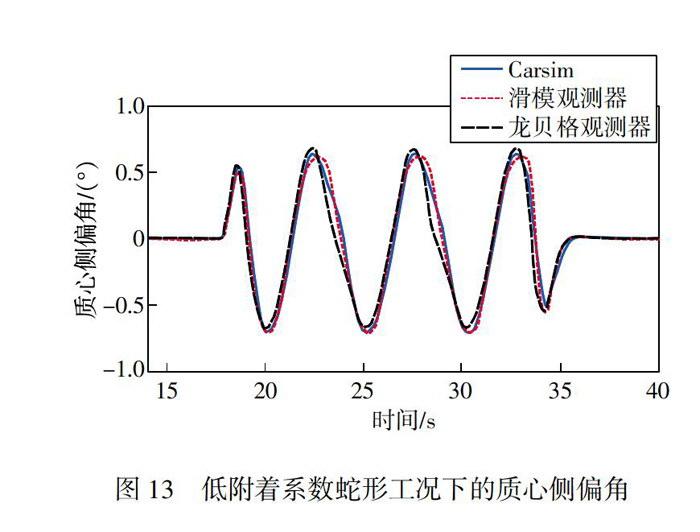
3仿真与分析
为了验证提出的滑模观测器对质心侧偏角的观测结果,本文在Carsim平台建立整车模型和2组道路模型,整车参数如表2所示。利用Matlab/Simulink模块建立观测器模型,两者联合仿真。通过不同的路面附着系数和车速的设置检验观测器的观测精度和鲁棒性能。车辆原地起步,达到相应的速度后,参照ISO 3888《乘用车车道急剧改变操纵用试验车道》标准进行双移线工况和蛇形工况仿真。
将整车参数代入式(11)可得V