波浪滑翔器纵向速度与波浪参数定量分析
2018-05-11桑宏强孙秀军
桑宏强, 李 灿, 孙秀军
【编者按】波浪滑翔器是一款能够完全借助自然能源长周期运行的波浪驱动水面无人船。因其在海洋调查、气象观测、国土防御和信号中继等领域的突出表现, 近年来越来越多的国内外研究团队投入此项研究中。在国内, 孙秀军教授团队致力于海洋移动观测平台的研发, 2017年其团队研发的“海哨兵”波浪滑翔器在科技部第三方见证下完成了国家高技术研究发展计划(863计划)的海试验收, 创造了国内运行时间最长, 航行里程最远的海洋移动观测机器人记录。并在我国南海经历了3次台风极端海况测试, 国内首创地在最大波高9 m的海况下, 成功获取了各类水文气象参数。标志着我国波浪滑翔器打破了国外技术封锁, 平台性能达到了国际领先水平。本文由孙秀军教授团队成员撰写, 通过仿真方法得到了波浪滑翔器纵向速度与海况的对应关系, 并通过海试试验获取了波浪滑翔器的实际速度, 试图揭示波浪滑翔器运动状态与波浪参数的定量规律。
波浪滑翔器纵向速度与波浪参数定量分析
桑宏强1, 李 灿1, 孙秀军2
(1. 天津工业大学 机械工程学院, 天津, 300387; 2. 中国海洋大学 物理海洋教育部重点实验室, 山东 青岛, 266100)
波浪滑翔器纵向运动速度受海况影响而发生变化, 揭示波浪滑翔器纵向运动速度与浪高以及波周期之间的关系对提升和改进波浪滑翔器的动力性能具有重要意义。以“海哨兵”波浪滑翔器为研究对象,首先建立波浪滑翔器动力学模型; 然后仿真获取其纵向速度与波高及波周期的定量关系; 最后试验获取波浪滑翔器在真实海况下的纵向速度, 并与仿真得到的理论值进行对比分析。研究结果表明, 波周期一定时, 波浪滑翔器纵向速度与波高的平方根成正比; 波高一定时, 波浪滑翔器的纵向速度与波周期的倒数成正比。通过动力学方程推导和试验数据分析, 建立了波浪滑翔器纵向速度与海浪参数的定量关系, 为波浪滑翔器结构参数优化和后续设计提供了依据。
波浪滑翔器; 动力学模型; 纵向速度; 波浪参数
0 引言
自2009年美国Liquid Robotics公司出售第1台波浪滑翔器开始, 至今SV2和SV3系列波浪滑翔器已广泛应用于海洋生物调查、水文气象监测、海岸环境安全和水面通信中继等领域[1-4]。国内关于波浪滑翔器的研究虽然起步较晚, 但也取得了长足的进展[5-7]。当前, 孙秀军博士团队开发的“海哨兵”波浪滑翔器已创造了海上无故障自主航行99天, 单次累积航行3 595 km(外界因素干扰被迫中断), 最大生存浪高9 m(最大波高)等记录。相继完成了青岛环千里岩岛气象水文观测试验, 南海1 200 km位置保持试验, 青岛潜标水面通信中继联合观测试验, 南海中尺度涡与水下滑翔器联合组网观测示范等[8]。
鉴于波浪滑翔器在海洋环境观测中的作用, 国内外大量学者开始对波浪滑翔器进行深入研究, 然而作为一款新型海洋移动观测平台, 其动力学研究还处于起步阶段。Nicholas D. Krau[9]修改了Fossen海洋航行器6自由度动力学模型使其适用于波浪滑翔器, 试验给出了牵引机的水动力参数, 但受海域局限性较大。Caiti A等[10]利用拉格朗日方法对波浪滑翔器纵垂面进行了建模, 求解其总体速度以及垂向位置随时间的变化, 但具体受力分析不明确。贾立娟[5]通过Kane方法对波浪滑翔器在纵垂面内进行了动力学建模, 分析了波浪滑翔器纵向速度的影响因素。杜晓旭[11]等在此基础上进一步研究, 着重分析了缆绳的长度对波浪滑翔器的影响。田宝强[12-13]分别用牛顿欧拉方法和D-H方法对波浪滑翔器进行了动力学建模。李小涛[6]修正了水下滑翔机的动力学模型, 使其能够适应波浪滑翔器的建模使用。以上学者均对波浪滑翔器进行了动力学模型的构建, 但是对于模型参数以及模型准确性都没有通过海上试验数据进行验证, 更没有给出确切的波浪滑翔器纵向运动速度与波浪特性之间的关联表达这一动力学规律。
文中首先利用牛顿欧拉方法建立波浪滑翔器的动力学模型。然后仿真分析不同海况下波浪滑翔器的纵向速度, 给出波浪滑翔器的纵向速度与海况的对应关系。最后组织试验对波浪滑翔器的实际速度进行验证, 利用试验验证理论的方式判断所建立模型以及得到结论的正确性。
1 模型简化及受力分析
波浪滑翔器是一个由水面船体、铠装缆、水下牵引机组成的特殊多体结构, 文章主要聚焦于波浪滑翔器的纵向运动速度, 即主要对波浪滑翔器纵垂面内的运动进行分析。为了求解其动力学方程, 并研究波浪滑翔器纵向速度与海况的关系,做出如下假设:
1) 水面船体与水下牵引机经由铠装缆连接, 铠装缆只传递垂向的拉力以及水平面内的旋转力矩, 且水下牵引机具有足够的质量, 铠装缆一直处于拉紧状态, 可视为上下两体为刚性连接;
2) 铠装缆上连接端连接水面船体的质心, 且水面船体的浮心与质心重合;
3) 铠装缆下连接端连接水下牵引机的质心, 且水下牵引机的浮心与质心重合。
因此波浪滑翔器就被简化成为一个具有两端质量的单体刚性杆件, 其两端质量分别代表水面船体和牵引机的质量。
如图1所示, 波浪滑翔器的整体坐标原点构建在其整体质心位置, 规定船体前进方向为正方向, 垂直于船体平面的方向为方向。对波浪滑翔器进行整体受力分析, 其受力主要为: 水面船体垂向受浮力F, 波浪作用力F和船行反方向阻力D, 牵引机受纵向推进力thurst,牵引机重量F和牵引机反方向阻力D。
2 动力学模型
应用牛顿欧拉方法[14], 建立波浪滑翔器纵向、垂向和缆绳摆动角度3个自由度的动力学模型, 用以揭示水面船体、铠装缆和水下牵引机的运动特质及水动力特性, 浪滑翔器的显式表达形式的动力学方程为
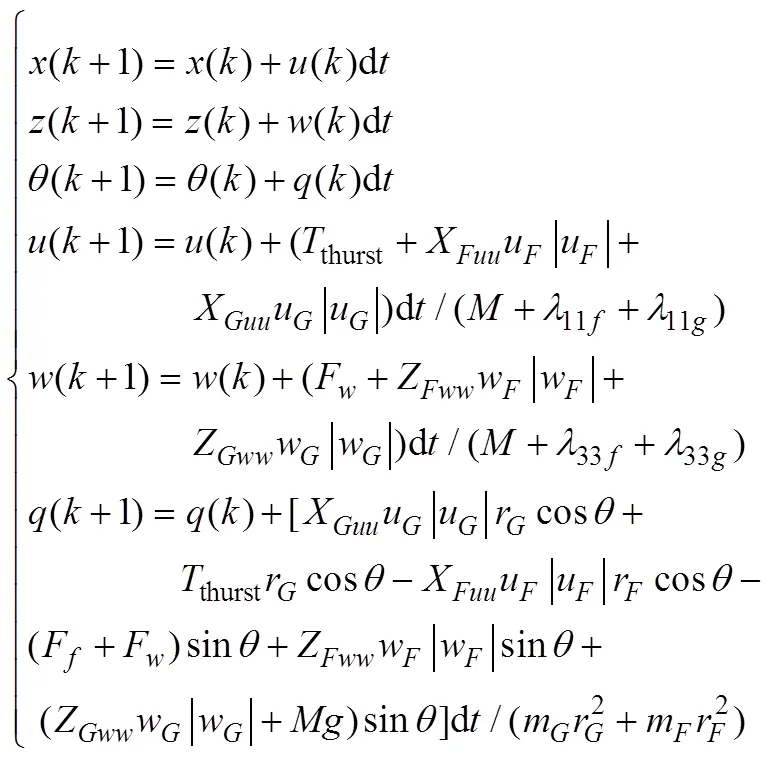


式中:=0.008 28,=0.000 211,=0.053 57,= 0.030 75为翼板升力阻力参数中关于攻角的系数[13];为攻角;为翼板与水平面夹角;为海水的密度;为翼板的速度;S为翼板面积。
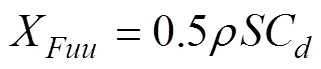
表1 波浪滑翔器的几何参数
通过确定弹簧的安装位置以及设置弹簧最优的刚度系数, 可以将翼板与水平面的角度相对波高周期变化的随动规律匹配到较合适的关系。“海哨兵”波浪滑翔器的翼板规律如图2所示, 假设波高变化规律呈正弦变化, 翼板角度变化规律也呈正弦变化, 但滞后波高变化规律1/4周期, 翼板角度增加或减少到±20°后不再增减, 作为峰值保持一定时间。
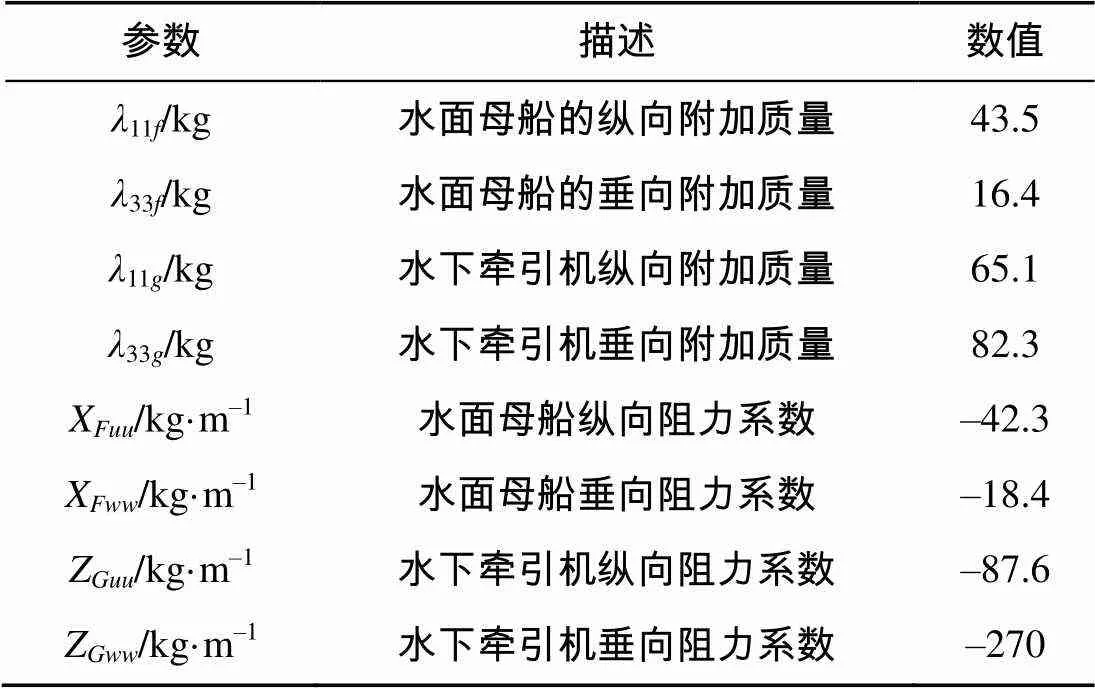
表2 波浪滑翔器动力学参数
海浪频谱理论表明, 不规则的海浪可以看成由大量的规则波浪反复叠加形成。为了清晰表达波浪滑翔器纵向速度与海况的对应关系, 特别是与波高、波周期的关系。文中采用微幅波理论, 将海浪理想认为是单一的规则波, 其波面起伏的位移运动方程可以表述为


伴随波浪的起伏, 波浪滑翔器的浮力并非一成不变。由于波浪起伏时, 波浪滑翔器上下运动加速度的产生, 波浪滑翔器浮体船的吃水量会随之发生变化。在波浪下降时, 波浪滑翔器的吃水量减少, 波浪上升时, 波浪滑翔器的吃水量增加。但是在海浪中, 这一吃水量的变化难以直接获得, 且这一变化量与总体浮力相比影响较小, 故仿真中对其忽略认为浮力不变, 将波浪滑翔器所受浮力表述为


波浪滑翔器的几何参数由“海哨兵”波浪滑翔器实测得到, 水动力学参数由经验数据和Fluent仿真得到。波浪滑翔器的几何参数和动力学参数分别如表1和表2所示。
3 仿真与分析
3.1 常规海况仿真
有研究表明波浪滑翔器的纵向速度受海浪参数中高波和波周期的影响最大[14]。文中分析青岛海域较为常见的3级海况的海况参数即波周期=4 s, 波高=0.8 m时的海况, 积分步长设为0.01 s, 仿真时间20 s, 仿真结果如图3所示。结果表明, 波浪滑翔器在近似3级海况的情况下, 纵向平均速度保持在0.35 m/s, 缆绳角度在3º~5º之间小角度往复。
3.2 定周期/定波高纵向速度仿真
为了进一步探究波浪滑翔器纵向速度与波高或波周期的定量关系, 进行了定周期不同波高下的仿真和定波高不同周期下的仿真。
在真实海况下, 一定区域内海浪的波周期短时间内一般不会发生大的变化, 因此采取定有效波周期, 不同波高的仿真手段, 对波浪滑翔器的速度预测是很有意义的。如图4所示, 波周期一定(=4)时, 波高分别以4 m, 3.2 m, 2.4 m, 1.6 m, 0.8 m, 0 m作为输入, 仿真得到波浪滑翔器纵向速度曲线。从图中可以看出, 波浪滑翔器的纵向速度在波浪变化起伏过程中不断周期性变化, 随着波高的增加, 波浪滑翔器最大速度随之增加。
但是最大速度增加的同时, 波浪滑翔器的纵向速度变化的幅值也随之增加, 即随着波高的增加, 波浪滑翔器纵向速度的增加趋势变缓。
取常见海况的波高(=1.6)进行定波高的仿真。波周期分别以2.6 s, 4.0 s, 5.6 s, 9.2 s, 14.2 s, 16 s作为输入, 得到波浪滑翔器的速度变化曲线, 如图5所示。波浪滑翔器的纵向速度随着周期的增加不断下降, 且趋于平缓, 纵向速度下降的趋势随着波周期的增加同样随之变缓。
经过上述分析虽然得到了波浪滑翔器前行速度与波高或波周期典型值的关系, 但是工程中更感兴趣的是波浪滑翔器纵向速度与海况参数的定量关系。文中对仿真区间进一步细化, 以波浪滑翔器的平均纵向速度为纵坐标, 波周期及波高为横坐标, 绘制出波浪滑翔器的速度与波高/波周期的对应曲线, 如图6所示。
应用MATLAB对数据点的变化规律进行拟合, 得纵向速度与波高/波周期的定量关系

式中: u为波高影响下波浪滑翔器的纵向速度; u为波周期影响下的纵向速度。同时发现, 纵向速度与波高的平方根成正比, 纵向速度与波周期的关系近似倒数关系, 对此进行相应拟合。有研究表明, 波高与波周期对波浪滑翔器纵向速度影响的权重不同, 波高对波浪滑翔器的纵向速度的影响占主导作用权重为1, 而波高对纵向速度的影响权重为2[14]。在此基础上, 将波浪滑翔器的纵向速度重新表达并定义为

4 海试试验及数据分析对比
4.1 海试试验
2015年12月28日~2016年1月8日, “海哨兵”波浪滑翔器在青岛海域进行海域性能试验, 该次试验主要进行长时间通信能力评估、航位保持能力测试, 以及不同海况下的速度测试。波浪滑翔器从A点(121.426 09 E, 36.114 272 N)进行布放, 于B点(121.695 44 E, 35.724 336 N)进行回收。波浪滑翔器设定每15 min通过铱星系统回传其测量数据及GPS点定位信息, 控制策略为波浪滑翔器由前一目标点向下一个目标移动, 当进入一个目标点后, 自动切换奔向下一目标点。目标点1 ~7位于同一直线上, 总计行程长度为130 km, 目标点7与目标点8直线连接, 距离40 km, 目标点8与目标点9直线连接, 距离70 km, 目标路径直线长度总计为240 km。试验期间波浪滑翔器总计运行11天, 累积行程280 km。图7为“海哨兵”波浪滑翔器试验现场图。
如图8所示, 波浪滑翔器在海域海试的运行路径多为直线行驶, 不存在转向或者圆弧运动对波浪滑翔器的纵向运动产生分速度的影响, 能够较好的反应波浪滑翔器的真实速度与海况的对应关系。为了验证文中波浪滑翔器的动力学模型的有效性, 该次试验波浪滑翔器搭载波浪传感器可以有效测得波高、波周期等数据参数, 为波浪滑翔器纵向速度与海况的对比提供保证。
4.2 数据分析对比
数据显示, 该海域中试验时段的平均波浪周期约在4.3 s, 且上下波动不大, 波周期随时间的变化曲线如图9所示。波周期变动不大, 且4.3 s的周期接近于仿真设定的波周期为4 s的仿真条件, 这就保证了该次试验数据与仿真对比的有效性。
在波浪滑翔器回传的数据信息中, 选取运行第1天有效波高与波浪滑翔器的速度进行对比, 可以看出前18 h当天海面波高数据在1.0~1.3 m范围内波动, 波浪滑翔器的平均速度在0.35 m/s左右变动, 对比图6的仿真曲线, 波周期为4.2 s, 波高为1.0 m时, 波浪滑翔器的速度为0.36 m/s; 波周期为4.2 s, 波高为1.3m时, 波浪滑翔器的速度在0.42 m/s。同样选取第7天的波高与波浪滑翔器的速度进行对比, 当天海面波高数据在0.6~0.8 m的范围内变动, 波浪滑翔器的平均速度在0.2~0.4 m/s的范围内变动, 对比图6的仿真曲线, 波高为0.8 m时, 波浪滑翔器的全天平均速度也与所仿真数据较为吻合。且从图中可以看出其纵向速度的变化与波高的起伏有正相关的趋势。但由于此次试验离山东半岛岸边较近, 此处有明显的半日潮流, 潮流对波浪滑翔器的速度影响较大, 此外还有海风等其他不确定因素也有一定影响, 使得波浪滑翔器的纵向速度随有效波高变化的一致性并不十分明显。试验数据对比如图10所示。
5 结束语
文中通过动力学方程仿真和试验数据分析, 着重研究了波周期为定值, 波高不断变化时纵向速度与波高的关系, 以及波高为定值, 波周期不断变化时纵向速度与波高的关系。建立了波浪滑翔器纵向速度与海浪参数的定量关系, 为预测波浪滑翔器在不同海况下的动力学表现, 提供了一种手段。该研究对预测“海哨兵”波浪滑翔器在具体海况中的动力学表现有较大意义, 同时也为提高波浪滑翔器的波浪捕获效率, 不断优化设计波浪滑翔器结构参数提供了依据。
文中所述试验研究中, 由于波浪滑翔器所处的试验海域为典型的半日潮区, 其速度受潮流影响较大, 虽能大致体现纵向速度随波浪滑翔器纵向速度的趋势, 但变化一致性并不明显, 在今后的工作中, 可以考虑将半日潮流的影响去除, 得到更为真实的波浪滑翔器纵向速度, 与仿真效果进行进一步对比。
[1] Daniel T, Manley J, Trenaman N. The Wave Glider: Enabling a New Approach to Persistent Ocean Observation and Research[J]. Ocean Dynamics, 2011, 61(10): 1509-1520.
[2] Aulicino G, Cotroneo Y, Lacava T, et al. Results of the First Wave Glider Experiment in the Southern Tyrrhenian Sea[J]. Advances in Oceanography and Limnology, 2016, 7(1): 16-35.
[3] Goebel N L, Frolov S, Edwards C A. Complementary Use of Wave Glider and Satellite Measurements: Description of Spatial Decorrelation Scales in Chl-a Fluorescence across the Pacific Basin[J]. Methods in Oceanography, 2014, 10: 90-103.
[4] Suberg L, Wynn R B, Kooij J V D, et al. Assessing the Potential of Autonomous Submarine Gliders for Ecosystem Monitoring across Multiple Trophic Levels (Plankton to Cetaceans) and Pollutants in Shallow Shelf Seas[J]. Methods in Oceanography, 2014, 10:70-89.
[5] 贾立娟. 波浪动力滑翔机双体结构工作机理与动力学行为研究[D]. 天津: 国家海洋技术中心, 2014.
[6] 李小涛. 波浪滑翔器动力学建模及其仿真研究[D]. 武汉: 中国舰船研究院, 2014.
[7] 廖煜雷, 李晔, 刘涛, 等. 波浪滑翔器技术的回顾与展望[J]. 哈尔滨工程大学学报, 2016, 37(9): 1227-1236.
Liao Yu-lei, Li Ye, Liu Tao, et al. Unmanned Wave Glider Technology: State of the Art and Perspective[J]. Journal of Harbin Engineering University, 2016, 37(9): 1227-1236.
[8] Li C, Sang H, Sun X, et al. Hydrographic and Meteorological Observation Demonstration with Wave Glider “Black Pearl”[C]//International Conference on Intelligent Robotics and Applications. Cham: Springer, 2017: 790-800.
[9] Kraus N D. Wave Glider Dynamic Modeling, Parameter Identification and Simulation[D]. Hawai: University of Hawai¢I, 2012.
[10] Caiti A, Calabro V, Grammatico S, et al. Lagrangian Modeling of the Underwater Wave Glider[C]//Oceans, 2011 IEEE- Spain. Spain: IEEE, 2011: 1-6.
[11] 杜晓旭, 崔航, 向祯晖. 基于Kane方法的波浪驱动水下航行器动力学模型建立[J]. 兵工学报, 2016, 37(7): 1236-1244.
Du Xiao-xu, Cui Hang, Xiang Zhen-hui. The Multi-body System Dynamics Modeling of Wave Driven Underwater Vehicle Based on Kane Method[J]. Acta Armamentarii, 2016, 37(7): 1236-1244.
[12] Tian Bao-qiang, Yu-Jian-cheng, Zhang ai-qun. Dynamic Modeling of Wave Driven Unmanned Surface Vehicle in Longitudinal Profile Based on D-H Approach[J]. 中南大学学报(英文版), 2015, 22(12): 4578-4584.
[13] Tian B, Yu J, Zhang A. Lagrangian Dynamic Modeling of Wave-driven Unmanned Surface Vehicle in Three Dimensions Based on the D-H Approach[C]// IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems. Shenyang, China: IEEE, 2015: 1253-1258.
[14] Smith R, Das J, Hine G, et al. Predicting Wave Glider Speed from Environmental Measurements[C]//Oceans- 2011. Waikoloa, HI, USA: IEEE, 2011: 1-8.
(责任编辑: 许 妍)
Quantitative Analysis on Longitudinal Velocity and Wave Parameter of Wave Glider
SANG Hong-qiang1, LI Can1, SUN Xiu-jun2
(1.School of Mechanical Engineering, Tianjin Polytechnic University, Tianjin 300387, China; 2. Key Laboratory of Physical Oceanography, Ocean University of China, Shandong Qingdao, 266100, China)
The longitudinal velocity of a wave glider is influenced by the sea states. It is necessary to explore the relations of the longitudinal velocity of the wave glider with wave height and wave period for improving the dynamic performance of the wave glider. In this study, a dynamic model of the Sea Sentry wave glider was established to obtain the quantitative relation of its longitudinal velocity with the wave height or the wave period, and the simulation results of the longitudinal velocity were compared with the data obtained in sea trials. It is shown that the longitudinal velocity of the wave glider is proportional to the square root of the wave height when the wave period is constant, and is proportional to the reciprocal of the wave period at a certain wave height. In addition, the validity of the proposed dynamic model was verified. This study may provide the basis for structural parameter optimization and subsequent design of the wave gliders.
wave glider; dynamic model; longitudinal velocity; wave parameter
U674.941; O353.2
A
2096-3920(2018)01-0016-07
10.11993/j.issn.2096-3920.2018.01.003
桑宏强, 李灿, 孙秀军. 波浪滑翔器纵向速度与波浪参数定量规律分析[J]. 水下无人系统学报, 2018, 26(1): 16-22.
2017-11-06;
2017-11-28.
国家高新技术研究发展计划(863计划)2014AA09A507; 国家重点研发计划深海关键技术与装备重点专项无人无缆潜水器组网作业技术与应用示范项目2017YFC0305902.
桑宏强(1978-), 男, 博士, 教授, 主要研究方向为海洋环境机动观测技术.