船舶静电场在船舶跟踪定位中的应用
2018-05-11孙宝全姜润翔张伽伟
孙宝全, 颜 冰, 姜润翔, 张伽伟
船舶静电场在船舶跟踪定位中的应用
孙宝全, 颜 冰, 姜润翔, 张伽伟
(海军工程大学 兵器工程学院, 湖北 武汉, 430033)
来源于腐蚀防腐电流的船舶静电场具有明显的分布特征, 并含有位置信息, 可以用来跟踪船舶。论文研究了利用船舶静电场信号对船舶进行跟踪定位的可行性。文中首先建立了船舶运动的状态空间模型, 利用点电流法为船舶静电场信号建模, 并将船舶等效为点电流阵列; 然后分析介绍了4种卡尔曼滤波算法的异同; 最后结合Beasy数据, 利用仿真对比经典卡尔曼滤波在电场跟踪中的适用性。仿真结果表明, 采用船舶静电场信号可以有效地对船舶进行跟踪, 具有较好的应用价值; 在经典卡尔曼滤波算法中, 扩展卡尔曼滤波具有更好的适用性。
船舶静电场; 点电流阵列模型; 卡尔曼滤波; 状态空间模型
引言
来源于腐蚀防腐电流的船舶静电场(static electric field, SE)具有明显的分布特征, 海水中某点的静电场值由场源、场源与场点的相对位置决定。因此海水中静电场信息包含着船舶位置信息[1], 从理论上可以从传感器接收的电场信号值中反演出源强度和源位置等相关信息, 以用来对船舶进行跟踪定位。目前对船舶静电场的研究主要集中在电场建模[2]和电场隐身[3]上, 在跟踪定位领域的研究鲜见报道, 文中旨在研究利用船舶静电场对船舶进行跟踪定位的可行性。目前, 鱼、水雷在对目标的跟踪定位中利用最多的是目标声信号, 但在口岸、浅海等声学环境复杂的区域, 声学跟踪定位方法的性能将会因为环境干扰的影响而下降, 而电信号所受影响相对较小。目前, 一般船舶在3 km远处, 电场可达几个nV/m。在近场, 电场强度可以达到mV/m的量级, 而电场传感器测量精度可以达到零点几nV/m, 海洋环境噪声一般为0.5 nV/m的量级, 由于电场信号的显著性, 利用电场信号对船舶目标、鱼、水雷进行探测跟踪具有较高的可行性和广泛的应用前景。目前美国、俄罗斯等国都有相应的电场引信水雷。另外, 由电场传感器组成阵列可以作为预警防护系统。电场传感器可以与雷体采用一体化设计, 集成到相应的装备上。因此, 基于船舶SE信号的目标跟踪定位可以作为声学跟踪定位的一个重要补充, 在实际应用中具有重要意义。
目标跟踪定位方法首选滤波估值, 滤波估值可以从带噪声的观测数据中实时估计目标状态。利用SE信号对船舶进行跟踪最困难的地方在滤波初始条件不易确定, 而初始条件对于滤波算法的性能具有重要影响。
目前滤波算法主要包括粒子滤波(particle fi- lter, PF)[4]和卡尔曼滤波(Kalman filter, KF)[5]2大类。PF由于其计算代价过高, 在船舶电场跟踪中并不适用, KF形式相对简单, 易于编程实现, 因此获得了更为广泛的应用。KF主要包括扩展卡尔曼滤波(extended Kalman filter, EKF)、无迹卡尔曼滤波(unscented Kalman filter, UKF)、容积卡尔曼滤波(cubature Kalman filter, CKF)及其相应的变形形式, 比如迭代扩展卡尔曼滤波(iterated ex- tended Kalman filter, IEKF)[6]。
Beasy软件是一种电场仿真计算软件, 在船舶设计阶段常用于对船舶电场信号进行评估[7], 用Beasy软件得到的船舶电场数据与真实船舶情况基本相同, 可以用其产生SE信号用于算法仿真验证。
文中首先建立了船舶电场跟踪模型, 然后分析了KF算法的异同点, 最后利用Beasy产生的SE数据作为电场传感器的观测数据, 对比分析了KF算法在船舶电场跟踪中的适用性。
1 船舶跟踪状态空间模型
船舶跟踪状态空间模型包括状态方程和观测方程, 分别为[8]
1.1 观测方程
在船舶SE信号的建模方法中, 点电流法更加贴近物理实际, 同时具有更高的精度[7]。

由电位表达式可得电场表达式

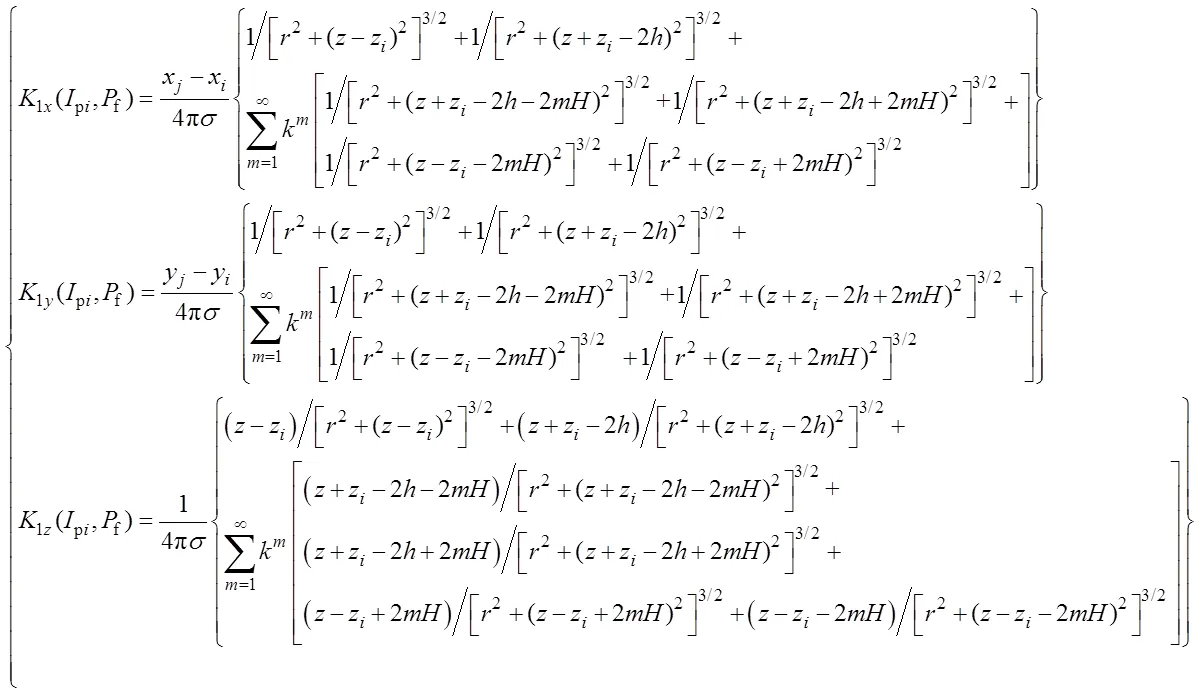

观测方程

1.2 状态方程

用离散白噪声加速度模型描述船舶运动状态[9]

加速度为高斯白噪声

点电流线阵为常量, 加一个比较小的噪声即可。则全状态方程

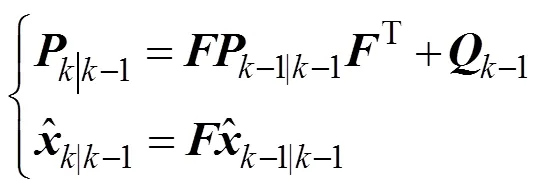
2 经典卡尔曼滤波算法分析
对于非线性问题, EKF、UKF和CKF是应用最为广泛的KF算法, IEKF是变形算法的代表。由于状态方程是线性的, 因此4种算法的时间更新步骤是相同的, 且
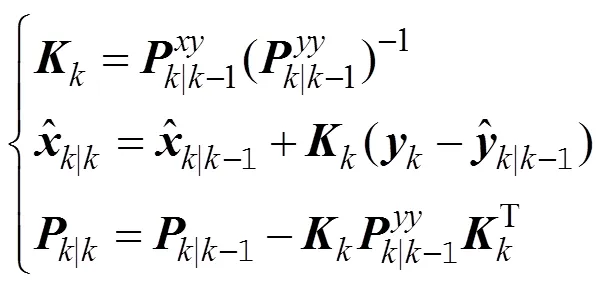
KF算法的观测更新包括观测值预测和观测校正2步, EKF、UKF和CKF采用相同的观测校正步骤[10]。
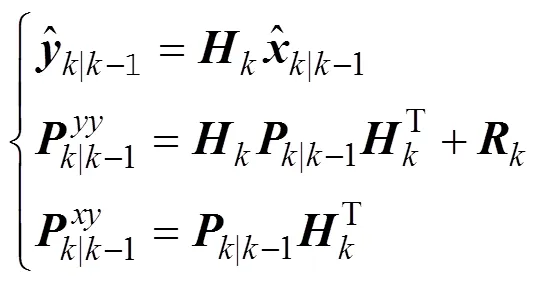
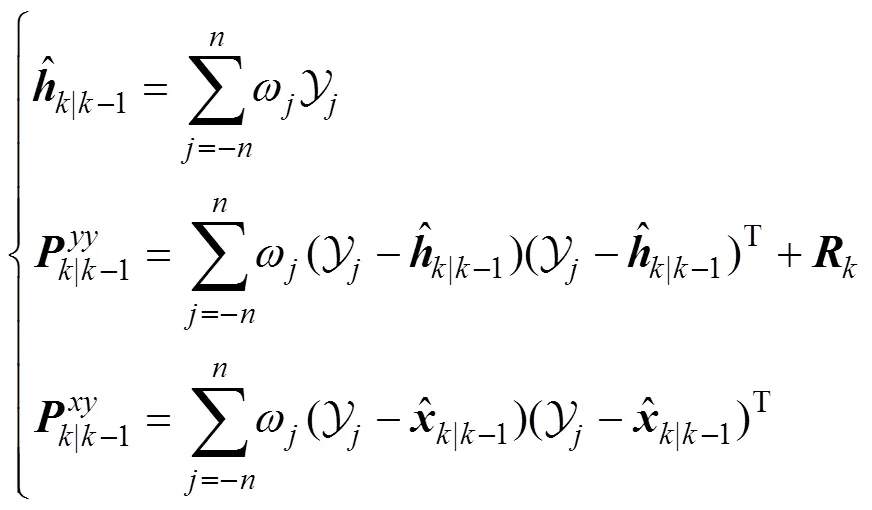
EKF、UKF和CKF不同之处在于观测值预测步骤不同。EKF通过选择泰勒展开的1阶项近似非线性方程; UKF和CKF通过选择不同的Sigma点和权重来近似均值和协方差的传播。它们的观测值预测方程分别如下。
1) EKF
2) UKF和CKF


线性约束条件下状态估计为

由最小二乘原理可得[8]

依据式(19)对每个算法的后验估计进行修正

3 仿真结果及分析
利用Beasy软件对某船舶进行电场计算, 基本参数如表1所示。

表1 Beasy计算基本参数
另外, 船壳的材料为钢, 涂有防腐蚀涂层, 螺旋桨材料为铜镍铝合金。假设该船舶船身涂层大致完好, 但螺旋桨裸露在海水中, 且船壳某处涂层有破损, 螺旋桨和船壳破损区域即是被腐蚀区域。船舶采用ICCP外加电流阴极保护和Zn防护。采用Beasy仿真数据模拟实船电场数据, 作为传感器接收数据。
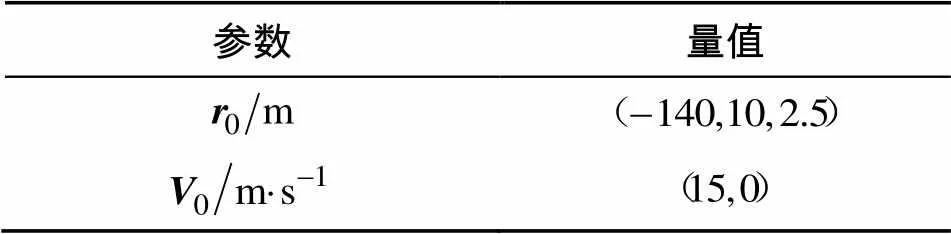
表2 仿真场景参数
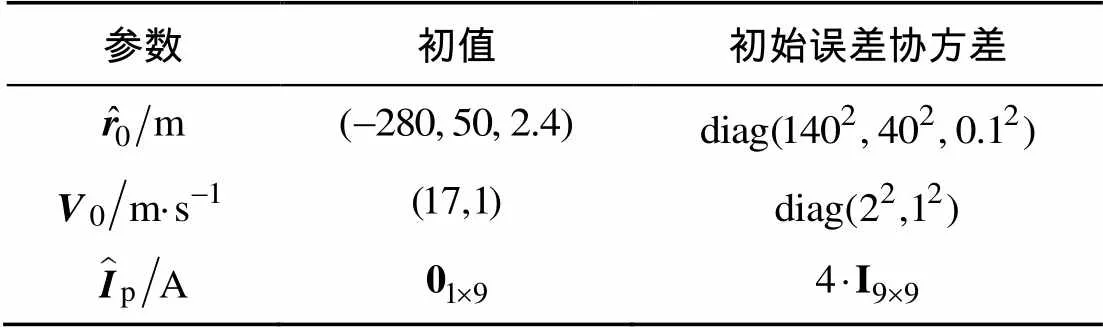
表3 滤波初始条件






4 结束语
文章探索了利用船舶SE信号对船舶进行跟踪定位的可能性, 并对比了经典卡尔曼滤波算法在此应用中的适用性。仿真结果表明, EKF具有更好的适用性; 用SE信号可以有效地对船舶跟踪定位, 定位精度较高, 具有重要的应用价值。另外, 船舶跟踪过程中, 在船舶轴向上存在局部最优解的现象, 这是需要进一步解决的问题。
文中研究是船舶电场用于跟踪定位领域的新探索, 所做工作目前还处于理论和仿真阶段, 下一步将尝试船模试验和海上试验。
[1] 陈聪, 蒋治国, 姚陆锋, 等. 浅海中潜艇腐蚀相关静态电磁信号特征[J]. 海军工程大学学报, 2014, 26(3):1-6.
Chen Cong, Jiang Zhi-guo, Yao Lu-feng, et al. Characteristic Analysis of Corrosion-related Static Electromagnetic Fie- ld Produced by a Submarine in Shallow Sea[J]. Journal of Naval University of Engineering, 2014, 26(3): 1-6.
[2] 胡英娣, 龚沈光, 闫永贵. 一种新的船舶静态电场深度换算方法[J]. 海军工程大学学报, 2013, 25(5): 16-20.
Hu Ying-di, Gong Shen-guang, Yan Yong-gui. A New Me- thod for Depth Extrapolation of Ship′s Electric Field[J]. Journal of Naval University of Engineering, 2013, 25(5): 16-20.
[3] 郑军林, 陈新刚, 郑春兵, 等. 舰船电场隐身技术[J]. 中国舰船研究, 2006, 1(4): 48-51.
Zheng Jun-lin, Chen Xin-gang, Zheng Chun-bing, et al. Electric Field Stealth Technology of Warships[J]. Chinese Journal of Ship Research, 2006, 1(4): 48-51.
[4] Gustafsson F. Particle Filter Theory and Practice with Positioning Applications[J]. Aerospace & Electronic Systems Magazine IEEE, 2010, 25(7): 53-82.
[5] Kalman R E. A New Approach to Linear Filtering and Prediction Problem[J]. Journal of Basic Engineering Tran- sactions of the ASME, 1960, 85(1): 35-45.
[6] Bell B M, Cathey F W. The Iterated Kalman Filter Update as a Gauss-Newton Method[J]. IEEE Transactions on Automatic Control, 2002, 38(2): 294-297.
[7] 姜润翔, 胡英娣, 龚沈光. 基于点电荷的船舶静态电场深度换算方法研究[J]. 电波科学学报, 2013: 29(4): 685-693. Jiang Run-xiang, Hu Ying-di, Gong Shen-guang. Research on Static Electric Field Depth Conversion Method of Ship Based on Point Charge[J]. Journal of Radio Science, 2013, 29(4): 685-693.
[8] Simon D. Optimal State Estimation[M]. New York: John Wiley&Sons, 2006.
[9] 刘妹琴, 兰剑. 目标跟踪前沿理论与应用[M]. 北京: 科学出版社, 2015: 106.
[10] Haug A J. Bayesian Estimation and Tracking: A Practical Guide[M]. New York: Springer, 2012.
(责任编辑: 杨力军)
Application of Ship Static Electric Field to Ship Tracking and Positioning
SUN Bao-quan, Yan Bing, JIANG Run-xiang, ZHANG Jia-wei
(College of Weaponry Engineering, Naval University of Engineering, Wuhan 430033, China)
The ship static electric field from corrosion anticorrosion current has obvious distribution feature and contains position information. It can be used to track ships. This paper discusses the feasibility of ship tracking and positioning with the ship static electric field. Firstly, a state space model of ship motion is established, the ship static electric field is modeled by point current method, and the ship is equivalent to a point current array. Then, four Kalman filter algorithms are analyzed and compared. Finally, the applicability of the classic Kalman filters to the electric field tracking is analyzed via simulation on the basis of the Beasy data. Simulation results show that the signal of the static electric field can be used to track ship effectively, and of the classic Kalman filter algorithms, the extended Kalman filter behaves best.
ship static electric field; point current array model; Kalman filter; state space model
孙宝全(1989-), 男, 在读博士, 主要研究方向为军用目标特性感知及其信息处理技术.
TJ83; TP274.2
A
2096-3920(2018)01-0057-06
孙宝全,颜冰, 姜润翔, 等. 船舶静电场在船舶跟踪定位中的应用[J]. 水下无人系统学报, 2018, 26(1): 57-62.
2017-09-04;
2017-10-09.
10.11993/j.issn.2096-3920.2018.01.0010