燃气阀响应时间的光学测量方法①
2018-05-11潘科玮陈晓龙
武 强,蔡 迪,牛 禄,潘科玮,杨 斌,陈晓龙
(1.上海理工大学 颗粒与两相流测量研究所/上海市动力工程多相流动与传热重点实验室,上海 200093;2.上海航天动力技术研究所,上海 201109)
0 引言
燃气阀是飞行器姿轨控动力系统的关键部件之一,其启闭动态特性直接影响飞行器姿轨控制效果[1-3]。在姿轨控动力系统中,燃气发生器产生高温燃气,通过多个燃气阀及推力控制装置来实现飞行器的换轨姿控[4-7]。燃气阀启闭响应时间是其中重要的参数之一[8-9]。目前,燃气阀启闭响应时间通常基于压力、推力等参数测量分析确定[10-12],这些接触式测量方法存在如下问题:测压通道充排气带来的误差;需要开孔安装传感器;只能用于单阀,集成样机受空间位置限制;供气管路对推力测量的干扰。因此,上述方法,已无法适应近年来高动态姿轨控发动机的发展,给样机的设计、验证与控制都带来了难度。
本文提出利用激光照射燃气阀羽流,通过分析其透射光强变化情况来确定燃气阀响应特性的光学测量方法,并基于该方法搭建固体姿轨控发动机燃气阀单阀冷态测试试验台,开展燃气阀启闭响应时间测量,并研究不同工作压强对燃气阀响应时间的影响。
1 测量原理与装置
当激光光束入射到喷管羽流时,由于颗粒或者气体折射率变化将向空间四周散射,透射光强将瞬时发生变化,而光强的变化很大程度可表征燃气阀的工作状态,由此提出利用激光照射燃气阀羽流,通过分析其光强变化情况来确定燃气阀响应特性的光学测量方法。测量原理如图1所示,在燃气阀羽流设置激光器与光电探测器,激光入射羽流,由于颗粒或气流造成的折射率变化引起透射光强发生改变,利用光强变化情况表征燃气阀羽流状态,从而分析确定燃气阀启闭响应时间。这一光学测量方法具有结构简单、时间响应极快等优势。
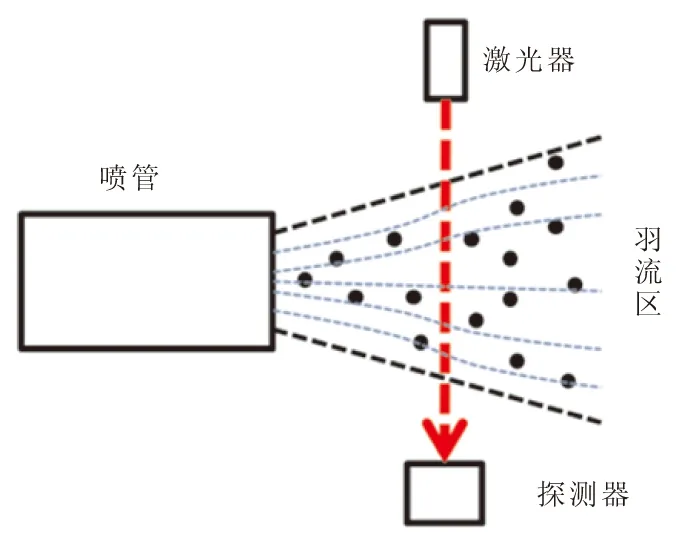
图1 测量原理示意图Fig.1 Schematic of measurement
如图2所示,当燃气阀启动控制信号t01时刻发出,燃气阀响应后透射光强发生变化,至t1时刻波动趋于稳定,认为流场稳定建立;燃气阀关闭控制信号t02时刻发出,燃气阀响应,t2时刻透射光信号波动;t3时透射光强趋于稳定。因此,可根据光强信号分析得到燃气阀响应时刻特征点:t1和t2时刻分别为燃气阀启、闭响应特征点,t3时刻为燃气阀完全关闭响应时刻特征点。由此结合控制信号可确定燃气阀启、闭响应时间及完全关闭特征时间:
t启=t1-t01
(1)
t闭=t2-t02
(2)
t完全关闭=t3-t02
(3)
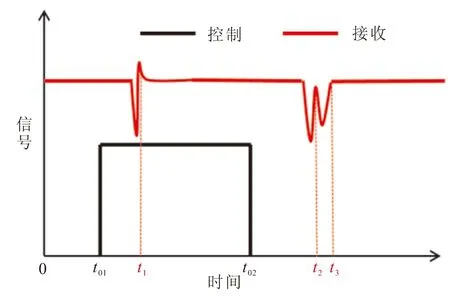
图2 典型数据分析Fig.2 Typical data of measurement
2 实验系统与装置
燃气阀单阀冷态测试试验台如图3所示。燃气阀安装于实验台架上,利用氮气充填腔体,保持一定工作压强,利用压强传感器测量阀体内压强,同时在实验台架上设置推力传感器测量氮气经燃气阀喷管喷出产生的推力,燃气阀由电磁阀控制产生高频作动。实验采用的电磁阀在控制信号低电平开启,高电平关闭。在喷管出口处安装光学测量装置,激光器发出激光,经喷管出口羽流区后由探测器接收,并利用数据采集卡采集,传输至计算机存储及处理。

图3 测试系统示意图Fig.3 Schematic diagram of test system
3 实验结果与分析
3.1 典型数据处理与分析
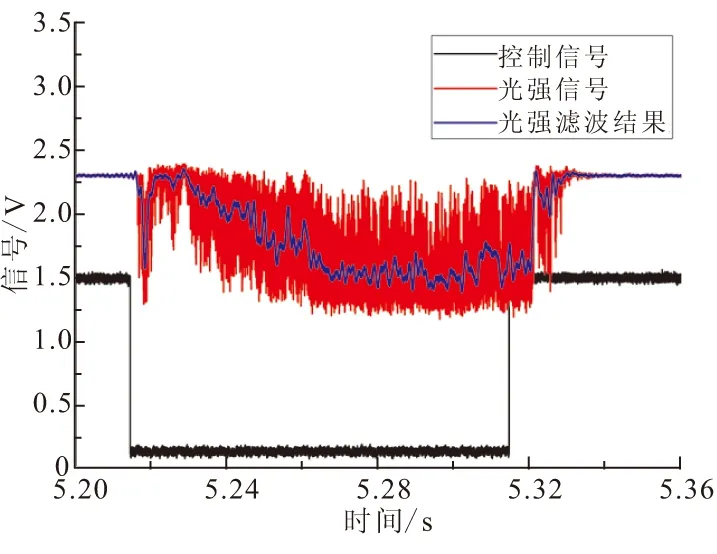
利用上述燃气阀单阀冷态测试试验台,开展了7.0 MPa工作压强燃气阀启闭响应时间测量实验,获得单阀冷态多次连续实验数据,其中数据采集频率为100 kHz。以图4所示4.38~4.56 s时间段实验数据为例,对透射光强信号进行带通滤波处理获得的信号进行分析,实验开始后4.407 69 s时刻发出电磁阀开启控制信号,带通滤波后的光强信号在一定时间后发生较为剧烈的波动后进入稳定段,以进入稳定段的时刻4.411 54 s作为燃气阀开启响应时间特征点,可确定该燃气阀开启响应时间为3.85 ms;实验在4.507 69 s时刻发出燃气阀关闭控制信号,带通滤波后的光强信号在4.518 82 s时刻由稳定段发生剧烈起伏变化且信号衰减较低,以该时刻电磁阀关闭响应时间特征点,可确定该燃气阀关闭响应时间为11.13 ms;带通滤波后的光强信号在4.527 26 s时刻转变为类似燃气阀开启前的光强信号,以该时刻作为燃气阀完全关闭响应时间特征点,可确定该燃气阀完全关闭响应时间为19.57 ms。因此,利用带通滤波对透射光强信号进行处理,可有效确定燃气阀启闭特征点,从而得到燃气阀启闭响应时间。
3.2 连续多次重复测量结果与分析
对连续多次高频作动信号进行分析,上述特征点重复性较好,利用这些特征点的选取可有效实现燃气阀启闭响应时间测量。对单次燃气阀实验数据进行处理,获得9组电磁阀响应时间测量结果如表1所示,可分析燃气阀启动响应时间、关闭响应时间、完全关闭响应时间分别为(3.85±0.04)、(10.97±0.07)、(20.45±0.3) ms。由此可知,燃气阀响应时间测量结果重复性较好,利用该方法及其特征点的选取对于燃气阀响应时间测量有效。

图4 典型测量信号Fig.4 Typical signal of detector

序号开启响应时间关闭响应时间完全关闭响应时间13.7110.7120.8523.7010.9319.6033.8511.1319.5743.9011.2621.9853.7511.2619.3863.8211.0220.6273.8910.6619.4784.0010.8721.9294.0010.9220.65平均响应时间3.8510.9720.45不确定度0.040.070.3
3.3 不同工作压强电磁阀时间响应测量
如图5所示,为燃气阀在5.0、7.0 MPa两种不同工作压强的透射光强信号。
对比可知,当工作压强较低(5.0 MPa)时,透射光强的稳定性较差;当工作压强较高(7.0 MPa)时,透射光强的稳定性较好,这与羽流流动情况吻合。因此,该光学测量方法获得的透射光强信号可有效的显示燃气阀喷管羽流的流动情况。
虽然在压强较低(5.0 MPa)时透射光强波动规律与较高压力(7.0 MPa)不同,但信号带通滤波后仍然存在相似特征点,仍然可分析得到燃气阀启闭响应时间。两种工作压强下燃气阀启闭响应时间结果如表2所示,可知当燃气阀工作压强提升,燃气阀开启响应时间由7.86 ms缩短至3.69 ms,关闭响应时间由7.53 ms增加至10.84 ms,完全关闭响应时间由16.97 ms增加至19.47 ms。因此,该光学测量方法能有效获得不同工作压强下燃气阀启闭响应时间。
(a)5.0 MPa

(b) 7.0 MPa图5 不同工作压强下响应曲线Fig.5 Signal curves in different working pressure

压强/MPa开启响应时间关闭响应时间完全关闭响应时间5.07.867.5316.977.03.6910.8419.47
3.4 典型压强与推力参数结果对比分析与讨论
燃气阀单阀冷态测试试验典型压强与推力变化如图6所示,该试验采用电磁阀在控制信号高电平开启,低电平关闭。根据压强与推力信号作为目标参数分析,得到燃气响应时间结果如表3所示,可知以推力作为目标参数优于以压强作为目标参数分析,这是压强传感器测量管路带来的压强响应延时导致。由于该试验燃气阀工作压力为6.0 MPa,未与光学测量试验同步测试,燃气阀启闭响应时间测量无法比较,但仍然可以验证光学测量方法的测量有效性。应用光学非接触式测量方法可有效消除接触式测量产生的干扰与测量偏差,这为后续发动机集成演示试验提供了一种易于实现的测量方案。

图6 典型压强和推力参数曲线Fig.6 Typical pressure and thrust curves of gas valve

目标参数开启响应时间关闭响应时间压强7.4313.82推力6.2411.31
4 结论
(1)提出的利用激光照射燃气阀羽流,通过分析其光强变化情况来确定燃气阀响应特性的光学测量方法,并利用带通滤波方式,通过选取合适的频率阈值可有效分辨燃气阀启闭状态,通过燃气阀单阀冷态试验结果可知,该方法可有效显示羽流的流动情况,实现燃气阀启闭响应时间的测量,且多次测量重复性较好。
(2)相对于目前通过压强、推力等参数测试确定燃气阀响应时间来说,提出的光学测量方法具有时间响应快、可有效消除接触式测量产生的干扰与测量偏差等优势,为后续发电机集成演示试验提供了一种易于实现的测量方案。
参考文献:
[1] 黄坚定.固体火箭发动机燃气喷射推力向量控制燃气阀 [J].固体火箭技术,1990(3):86-93.
[2] Faget Jean-Gabriel.Composite material hot gas valve systems for interceptor guidance control[R].AIAA 99-2648.
[3] 马红鹏,方蜀州,汤旭,等.浮动提升式燃气阀启闭动态特性研究[J].固体火箭技术,2015,38(2):225-231+250.
MA Hongpeng,FANG Shuzhou,TANG Xu,et al.A research of floating poppet valve's open-closed dynamic characteristics[J].Journal of Solid Rocket Technology,2015,38(2):225-231+250.
[4] 张德雄,王照斌.动能拦截器的固体推进剂轨控和姿控系统[J].飞航导弹,2001(2):37-41.
[5] K W Naumann,G Tussiwand,P Caldas Pinto,et al.Green gelled propellant gas generator for high-performance divert- and attitude control systems[R].AIAA 2016-4667.
[6] 徐丹丹,寇颖,王健英,等.美国固体姿轨控推力系统技术研究[J].飞航导弹,2015(7):64-70.
[7] 万东,何国强,王占利,等.针栓喷管技术在固体姿轨控系统中的应用研究[J].现代防御技术,2011,39(3):48-54.
WAN Dong,HE Guoqiang,WANG Zhanli,et al.An application study of pintle-nozzle technology for solid divert and attitude control system[J].Modern Defence Technology,2011,39(3):48-54.
[8] 常桁,张晓光,王一白,等.固体姿轨控比例推力器动态特性研究[J].科学技术与工程,2015,15(23):64-68.
CHANG Heng,ZHANG Xiaoguang,WANG Yibai,et al.study on dynamic characteristics of solid divert and attitude control proportional thrusters[J].Science Technology and Engineering,2015,15(23):64-68.
[9] 方蜀州,尹治武.固体姿轨控发动机燃气电磁阀快速驱动电路研究[J].固体火箭技术,2005,28(3):232-234.
FANG Shuzhou,YIN Zhiwu.The fast driving circuit for gas solenoid valve of solid rocket divert and attitude controlmotor[J].Journal of Solid Rocket Technology,2005,28(3):232-234.
[10] 欧阳华兵,徐温干.姿控发动机推力测量系统的动态建模与补偿[J].航天控制,2006,24(5):78-81.
OUYANG Huabing,XU Wengan.Dynamic modeling and compensation on trust measurement system of attitude control rocket motor[J].Aerospace Control,2006,24(5):78-81.
[11] 卫强,郭红杰,刘洌,等.基于PXI的液体姿轨控火箭发动机试验测控系统设计与实现[J].航空动力学报, 2016,31(12):2979-2987.
WEI Qiang,GUO Hongjie,LIU Lie,et al.Design and implementation of PXI based test measurement and control system for attitude and orbit control liquid rocket engine[J].Journal of Aerospace Power,2016,31(12):2979-2987.
[12] 任法璞.固体姿轨控动力系统推力品质评估方法研究[D].北京:北京理工大学,2016.
REN Fapu.Study on the thrust quality evaluation method of solid attitude and orbit control power system[D].Beijing:Beijing Institute of Technology,2016.