自动平衡悬架的受力分析及模型验证
2018-05-11席玉林邱肖盼
席玉林,邱肖盼
(1.北京金帛科技有限公司,北京 102299;2.钢铁研究总院,北京 100081)
0 引言
车辆悬挂一般会安装弹簧以减缓来自外界的冲击,但是弹簧本身的弹性使得它在吸震后反复伸缩,需要与弹簧并联安装减震器以减缓车身的过度震动,很难同时保证车辆的乘坐舒适性和操控稳定性[1]。目前,虽然通过复杂的电控系统可以及时调节弹簧的硬度和阻尼大小,但这也只是在车辆受到冲击后通过暂时的调整来满足当前舒适性或操控性的需求,无法做到同时提高舒适性和操控性[2],而且该系统的制造维护成本高,加之工作频度高而寿命较低,很难在所有车辆中普及。文中介绍的双弹簧自动平衡悬架可以在车辆遇到干扰后通过弹簧背压保持车身平衡高度,降低了减震器的阻尼作用,同时保证了车辆的乘坐舒适性和操控稳定性,同时由于工作频度较低以及需要消除的能量减少而具有寿命长和成本低的优点。
1 悬架弹簧受力分析
1.1 单弹簧悬架的特性曲线
悬架是汽车的车架与车桥或车轮之间的一切传力连接装置的总称,其中悬架弹簧的主要作用是缓和由不平路面传至车身的垂直载荷所形成的冲击并衰减由此引起的振动,以保证车辆的乘坐舒适性[3]。一般车辆配置4个或4个以上悬架装置且全部为单弹簧悬架,虽然有的在悬架装置中配备了2个以上的弹簧,但这些弹簧都是并联或串联布置,其工作原理与单弹簧悬架一致。如图1所示:其载荷F与弹簧形变f之间的关系特性曲线大致分为3种类型:(1)直线型;(2)渐增型;(3)渐减型,其悬架载荷F和弹簧形变f均是连续变化的。另外,有些悬架弹簧的特性曲线可以是以上2种或3种特性曲线的组合,称之为组合型特性线[4-6]。

图1 单弹簧悬架的特性曲线
1.2 乘坐舒适性和操作稳定性的矛盾
乘坐舒适性和操作稳定性是评价汽车性能的两个重要指标,而悬架中弹簧的形变是影响这两个指标的最重要因素。在目前的悬架设计中,弹簧的刚度大小受减震器阻尼的影响,减震器阻尼小则弹簧刚度小,悬架比较软,对车身的冲击小,乘坐舒适性高,但恢复平衡慢,操作稳定性较低;减震器阻尼大则弹簧刚度大,悬架比较硬,车身恢复平衡快,操作稳定性较高,但对车身的冲击大,乘坐舒适性降低[6-8]。另外,由于传统单弹簧悬架特性曲线的载荷和形变是连续线性的,任何一个悬架弹簧载荷的变化都会导致其他弹簧随之发生相应的形变,最终破坏车身的平衡,使得乘坐舒适性和操控稳定性在当前的汽车设计中始终是“鱼和熊掌”的关系[9]。
1.3 主动干扰与被动干扰
车辆在正常行进过程中,车身会受到各种干扰,这些干扰主要表现在使汽车悬架在垂直方向上的载荷发生变化。传统悬架的变形和垂直受力有连续线性的关系,弹簧载荷的变化会导致悬架发生相应的形变[10-11],这是目前汽车设计中乘坐舒适性和操作稳定性出现矛盾的直接原因。
以最常见的4个悬架的车辆为例,车辆在行进过程中,由于速度、方向的变化和不平路面的影响,车身对悬架的载荷大小会发生不同的变化,主要表现为:
(1)车辆行驶方向发生变化时,其中一侧悬架的载荷增大,另一侧载荷减小,导致车身侧倾,即出现“横摇”现象;
(2)车辆行驶速度发生变化时,前后悬架载荷也会发生相应变化,例如刹车时的点头或加速时的后仰,即为“纵摇”现象;
(3)行驶方向和速度同时发生变化时,其中一个悬架的载荷增大而压缩,其对角的悬架载荷减小而伸长,便会出现“斜摇”现象。
(4)由于路面不平整对车轮产生的冲击通常是随机的,悬架弹簧的载荷随之发生变化,经常会出现“斜摇”现象。
其中,第(1)~(3)项是由于人为操控车辆而发生的,是车辆的主动行为导致悬架弹簧发生了形变,一般称之为“主动干扰”,这种干扰持续时间长、强度低。因此,减小悬挂受到主动干扰时的弹簧形变,提高操作稳定性,是悬架设计的核心目标之一。
第4项是由于路面不平整而发生的,一般称之为“被动干扰”,这种干扰持续时间短、强度高。因此,在其中一个悬架弹簧发生形变的同时尽可能减小其他悬架弹簧的形变,提高乘坐舒适性,也是悬架设计的核心目标之一。
但是,由于主动干扰和被动干扰的存在,在目前的单弹簧悬架设计中,只要有一个悬架弹簧受到的载荷发生变化,其他弹簧悬架的载荷也会随之改变,而且弹簧形变和载荷线性相关,其发生的变形便会破坏车身平衡,无法避免车身的横摇、纵摇和斜摇现象,不能同时保证车辆的乘坐舒适性和操控稳定性。
2 双弹簧自动平衡悬架
2.1 双弹簧悬架的设计原理
由于连续线性的悬架弹簧特性无法解决乘坐舒适性和操控稳定性的矛盾,作者利用两个弹簧的不同背压开发了具有阶梯线性的双弹簧悬架。弹簧背压就是对悬架的弹簧施加一个适当的预紧力,当悬架受力不超过弹簧的背压时,行程不会发生变化。通过一定的设计,当强度低的主动干扰发生时,悬架不发生形变,车身自动保持原来的平衡;当强度高的被动干扰发生时,受冲击悬架弹簧发生相应的形变,没有受到冲击的其他悬架弹簧不发生形变,使车身自动保持原来的平衡。
在结构设计上,由于一个弹簧被预紧力限制后,不能参与悬架的全部行程,采用2个带背压的弹簧组成悬架的全部行程,以静止平衡载荷点开始,主弹簧参与悬架的压缩行程,主弹簧采用长度限制提供预紧力,这个预紧力大于悬架的平衡载荷;从静止平衡点开始,采用副弹簧参与悬架的伸长行程,悬架的负载大于副弹簧的最大压缩力,使副弹簧处于最大背压状态,这个最大背压小于悬架的平衡载荷。
通过具有阶梯线性特性曲线的悬架弹簧设计,使悬架具备智能特征,通过弹簧的载荷强度高低区分主动干扰和被动干扰,做到主动干扰时不发生形变,被动干扰时主动缓和冲击,自动保持车身的平衡,同时提高了车辆的乘坐舒适性和操作稳定性,这是目前传统悬架的设计理论无法实现的。
2.2 双弹簧悬架的特性曲线
双弹簧悬架的特性曲线如图2所示:悬架在平衡静止时的静载荷为G0,主弹簧预载荷F1,设定F1≥1.2G0,副弹簧预载荷F2,设定F2≤0.8G0;主弹簧在悬架的压缩行程工作,副弹簧在悬架的伸长行程工作;压缩行程和伸长行程之间是作者设计的高刚性区间,在这个区间内,悬架载荷F发生变化时,悬架形变f很小甚至为0。

图2 双弹簧悬架的特性曲线
由图2可知,该双弹簧悬架的特性曲线是阶梯状直线,不同于上述单弹簧悬架的连续型特性。在最低载荷Fmin逐渐加载到满载荷Fmax的过程中所体现出来的曲线特性如下:
(1)在伸长行程,副弹簧变形,主弹簧没有形变,形变大小与副弹簧参数相关;
(2)在刚性区间,副弹簧和主弹簧都没有形变;
(3)压缩行程,主弹簧变形,副弹簧保持在最大形变状态,形变大小与主弹簧参数相关。
2.3 双弹簧悬架的自动平衡原理
普通车辆一般配置4个以上的悬架装置,在悬架的平衡静止位置,设定悬挂的载荷为G0,如果悬架的主弹簧预载荷F1和副弹簧的预载荷F2同时满足以下关系式:
则双弹簧悬架就可以使车辆在设计参数范围内运动,保持车身的自动平衡,同时保证车辆的乘坐舒适性和操控稳定性,原因如下:
在此悬架中,作者设定F1=1.2G0、F2=0.8G0,车辆在运动或装载过程中,悬架所受力F在0.8F0~1.2F0之间变化时,悬架行程f不发生变化,在悬架的静止平衡点上的高刚性区间内,悬架的刚性是无穷大的,f的变化接近于0,在一般的车辆行驶状态,悬架受到的主动干扰不超过0.8F0~1.2F0,车身能自动保持平衡;当悬架受到被动干扰时,受到冲击的悬架的载荷超过0.8F0~1.2F0时,悬架发生相应的变形,同时这个悬架变形后,通过车身传导到其他悬架,对其他悬架形成主动干扰,一般情况下传导的主动干扰依然在0.8F0~1.2F0内,其他悬架不发生形变,车身依然保持平衡。
当被动干扰发生时,实际上被动干扰时刻都在发生且变化不规律,基本上都是以单个悬架受到冲击为主,多个车轮同时受到冲击的概率很小。以单个车轮受到来自于地面的冲击为例进行分析,当单个车轮受到来自于地面的冲击时,传导到悬架产生被动干扰,这个干扰通常作用时间很短,冲击强度很高,大多时候远超过一个G,则悬架必须发生变形,否则该冲击会对车身造成破坏。但是,在配置了4个及以上双弹簧悬架的车辆中,当其中一个悬架发生变形时,由于弹簧的预紧力与静止载荷的差值小于0.2G,也就是说通过车身对其他悬架的影响也不超过0.2G,这就意味着其他悬架的行程不发生变化,由于3个点就便可以确定一个平面,所以车身的平衡并不会被破坏。
上述悬架的主动干扰是在理想的假设情况下,实际上由于减震器阻尼的存在会导致车身的干扰超过设定值,所以作者采用压缩阻尼足够小的单向减震器,这样便可以将被动干扰造成的主动干扰降低到设计参数范围内,实现车身的自动平衡。
2.4 双弹簧悬架减震器的设计
上述双弹簧悬架中采用2个带有背压的弹簧保持了车身的平衡,但是车轮及车身的震动需要并联减震器对振动能量进行消减。需要特别说明的是:由于双弹簧悬架具有车身自动平衡特性,减少了车身的不必要震动,所需要消减的能量也降低很多,对车辆悬架减震器的阻尼设计也会有所不同。
首先,减震器可以仅在悬架的压缩行程设计阻尼。因为悬架的压缩行程有可能会导致车身的震动,需要阻尼消减能量,使车身尽快恢复平衡;在悬架的伸长行程,一般仅为车轮的震动,对车身的影响较小,从成本考虑可以取消减震阻尼的设计,对车辆的行驶性能不会有太大的影响。
其次,要求减震的压缩阻尼相对系数小于0.1,回弹阻尼相对系数大于0.5。这样的设计可以使弹簧在压缩过程中降低刚性,减弱对车身的冲击,将它对其他悬架的主动干扰控制在较小的范围内。同时,较大的回弹阻尼系数可以将车身的振动频率控制2 Hz以下,保证车辆的乘坐舒适性。
3 双弹簧悬架的实物模型验证
3.1 实物模型的设计
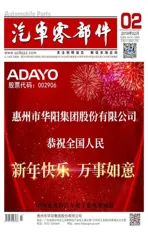
为了验证双弹簧悬架的自动平衡原理,这里设计了一个10∶1的实物模型(如图3所示),此模型采用500 mm×200 mm×12 mm铝合金板模拟车身,在4个角位置配置由2个弹簧并联的双弹簧悬架,其中一个弹簧在车身上部用固定螺栓进行预紧,预载荷可调整。
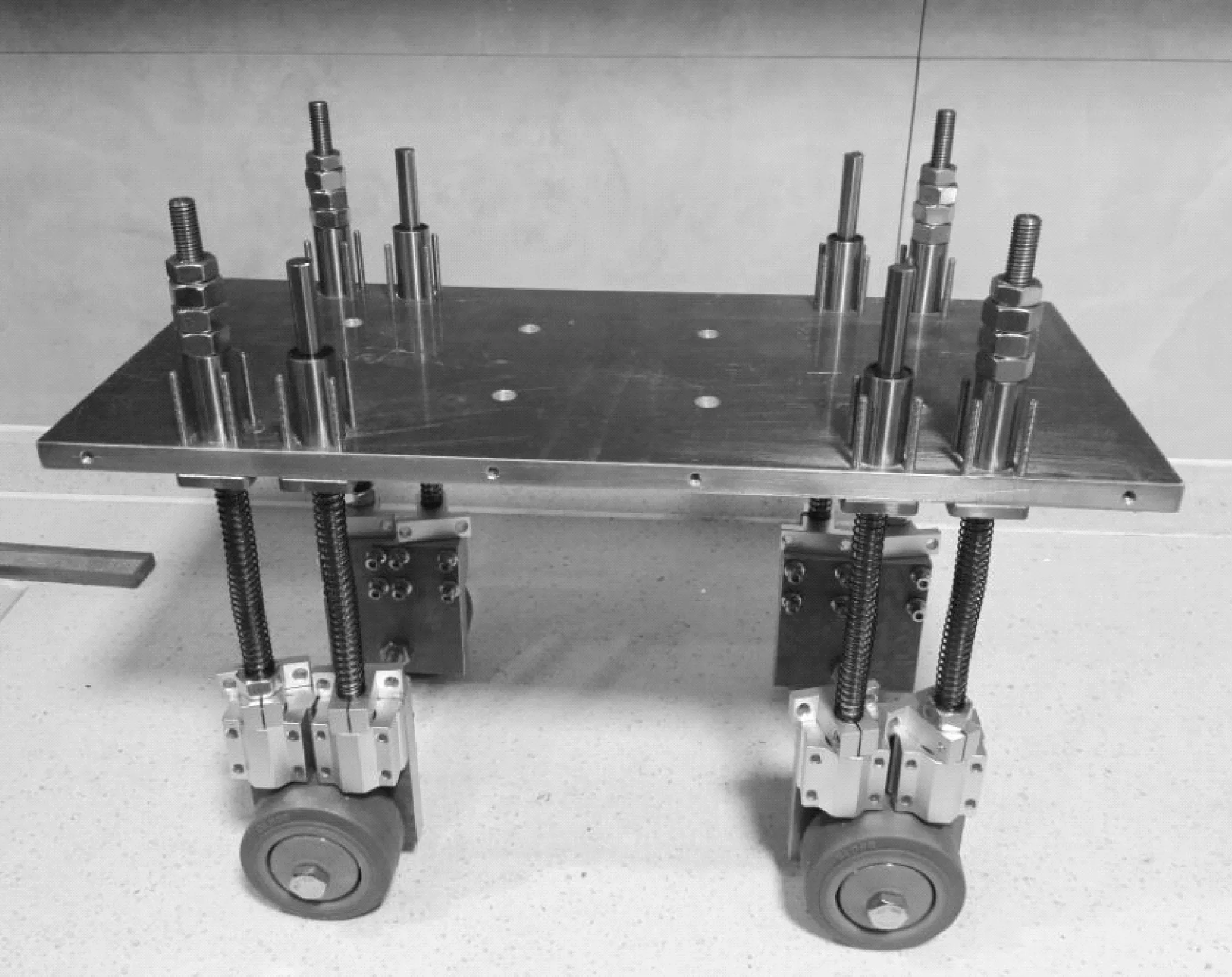
图3 10∶1实物模型
3.2 实物模型对比试验
在试验过程中,分3种情况进行高度测量:第一种是车辆空载;第二种是在一角配重加载,配重质量为铝合金板的15%;第三种是在单个车轮底部增加高度,此试验中采用一本厚度大约5 mm的书,然后测量车身高度。实际测量结果表明3种情况的车身高度相同,对比如图4所示。
图4 实物模型对比试验
3.3 模型对比试验分析
在空载试验之前,取消弹簧的预紧力,用手推动小车并较快地变化速度和方向,由于重心配置很高,模型晃动明显,悬架的弹簧变形频繁,这与重心较高的商用车类似,速度和方向不能变化太快,否则会严重影响车辆的安全性。
随着预紧力的增加,即使在没有减震器的帮助下,车身的稳定性也越来越高,这证明仅仅依靠弹簧而不需要减震器也可以实现车身稳定和平衡。
调整4个悬架的预紧力,使其在适当位置并保持一致后进行的对比试验结果如下:
(1)空载测量车身高度,尺寸是141 mm;
(2)加载配重7.5%时,车身高度尺寸141 mm;配重增加至15%时,车身高度仍保持在141 mm;只有当配重超过弹簧的预紧力后,车身高度开始降低,增加配重至22.5%时,车身高度为125 mm;
(3)在一个悬架底部放置厚度大约为5 mm的一本书,使小车其中一个车轮压到书的上面,测量车身高度尺寸为141 mm。
综上分析,试验(1)和(2)对比可以验证双弹簧悬架的车身高度保持功能和弯道车身平衡功能。试验(1)和(3)对比可以验证双弹簧悬架在单个车轮受到路面冲击时能够实现车身的自动平衡功能。
4 双弹簧悬架的技术优势
4.1 实现车身自动平衡
在悬架系统中安装双弹簧减震总成可以实现车身的自动平衡,其负荷为主弹簧的预载荷和副弹簧的组合作用力,通过优化设计悬架的3个刚度区间,可以让悬架实现自动过滤功能。悬架不需要变形时,就保持超高刚度;当其中一个悬架需要变形时,能尽量保证其他悬架不变形或变形很小,这样在设计时不仅可以同时提高车辆的操作稳定性和乘坐舒适性,还能保持车身高度不变,避免或最大限度地减少横摇、纵摇和斜摇的发生,这些性能指标也是当前的单弹簧悬架技术所无法实现的。
4.2 同时提高操作稳定性和乘坐舒适性
由于主弹簧预载荷的存在,通过主弹簧和副弹簧的组合即可以保持车身的平衡,那么就不需要减震器的阻尼来保持车身平衡和减少车身的摇动,因此可以采用很小的压缩阻尼,减弱车轮冲击对悬架的影响,同时采用较大的回弹阻尼,消除振动能量,这样就不会因为减震器的阻尼太小而影响操作稳定性,也不会因为阻尼太大而影响乘坐舒适性,可以同时保证车辆的乘坐舒适性和操作稳定性。
4.3 优异的综合性能
双弹簧悬架的自动平衡作用在很大程度上减少了车身的震动,大幅度减少了需要消除的能量,降低了减震器的阻尼作用,不仅同时提升了车辆的操作稳定性和乘坐舒适性,减少了不必要的能源消耗,还减少了弹簧和减振器的工作频度,有效提高了其使用寿命,降低了生产成本和后期的维护保养成本,这与当前的单弹簧悬架系统相比具有明显的技术优势,具有广阔的发展前景。
参考文献:
[1]黄彩虹.高速车辆减振技术研究[D].成都:西南交通大学,2012.
[2]陈双.基于电控空气悬架的轿车平顺性和操纵稳定性协调控制研究[D].长春:吉林大学,2012.
[3]MAHMOODI-KALEIBAR M,JAVANSHIR I,ASADI K,et al.Optimization of Suspension System of Off-road Vehicle for Vehicle Performance Improvement[J].Journal of Central South University,2013,20(4):902-910.
[4]杨蔚华.半主动悬架电动轮汽车的动力学特性与振动控制研究[D].武汉:武汉科技大学,2015.
[5]WANG C Y,DENG K,ZHAO W Z,et al.Robust Control for Active Suspension System under Steering Condition[J].Science China(Technological Sciences),2017,60(2):199-208.
[6]鲍卫宁.汽车空气悬架及其控制系统动力学仿真分析研究[D].武汉:华中科技大学,2011.
[7]李仕生.车辆可变阻尼减振器半主动悬架研究[D].重庆:重庆大学,2012.
[8]MIWA K,KUROIWA N.Damping Force Variable Shock Absorber:20170048A1[P].2017-01-11.
[9]SUN X Q,CHEN L,WANG S H,et al.Vehicle Height Control of Electronic Air Suspension System Based on Mixed Logical Dynamical Modelling[J].Science China(Technological Sciences),2015,58(11):1894-1904.
[10]符浩翔.汽车悬架与四轮转向系统的综合控制研究[D].重庆:重庆大学,2005.
[11]BIANCHI M.Vehicle Wheel Suspensions Using Spring Combined with Flexible Armouring for Modifying Stiffness Curve:CN1245550A[P].2000.