遥感卫星数据接收天线抗阵风扰动技术研究
2018-05-05潘蒨李日尚
潘蒨 李日尚
摘 要: 为解决阵风扰动对遥感卫星数据接收站窄波束天线跟踪性能的影响问题,采用安装天线罩抗风、使用大惯量电机增加天线转动惯量以及优化跟踪策略等方法。通过阵风扰动建模、伺服电机与传动机构建模、控制环路建模以及Matlab仿真,得出减少阵风扰动影响的几种方法,比较几种方法的适用范围、优缺点和可实现性,得出解决遥感卫星数据接收站窄波束天线抗阵风扰动的结论,为以后的工程项目建设提供参考。
关键词: 阵风扰动; 天线跟踪; 控制环路; 遥感接收; 转动惯量; 窄波束天线
中图分类号: TN820?34 文献标识码: A 文章编号: 1004?373X(2018)09?0021?03
Abstract: In order to weaken the influence of gust disturbance on tracking performance of narrow beam antenna of remote sensing satellite data receiving station, the methods of radome anti?gust installation, antenna rotary inertia increase with large inertia motor and optimization tracking strategy are adopted. The modeling of the anti?gust disturbance, control loop, servo motor and transmission mechanism, and Matlab simulation are carried out to get several methods for the reduction of gust disturbance. The adaptability, merits and feasibility of the methods are compared to obtain the conclusion that the narrow beam antenna of receiving station of remote sensing satellite data can resist the gust disturbance, which provides a reference for the future engineering project construction.
Keywords: gust disturbance; antenna tracking; control loop; remote sensing receiving; rotary inertia; narrow beam antenna
0 引 言
隨着星载传感器的发展,遥感卫星需要下传的数据量越来越大,速率越来越高,下传数据占用的带宽也同步增大[1],以致于目前在X频段分配的带宽不能满足要求。为了大容量数据的实时传输,除了研究更加先进的编码方法和调制技术之外,ka频段的应用也是一种发展趋势[2]。这种情况下接收天线的波束宽度非常窄,例如12 m口径天线工作在25~27.5 GHz频率时[3],其天线半功率波束宽度大约是0.06°。对于如此窄波束的接收天线,阵风扰动对天线跟踪性能的影响必须得到高度关注。
1 建模与仿真
1.1 阵风扰动建模
自然风由稳态分量和动态分量两个部分组成,稳态分量指在一段时间内的平均风速,动态分量指围绕稳态风速随机变化的分量[4]。对于稳态分量,当伺服跟踪系统设计为二阶无静差系统时,其对跟踪精度的影响可以忽略不计,真正影响跟踪性能的是动态分量即阵风。
前人大量的研究和风洞试验认为[5],风对对称抛物面天线产生的扭转力矩可以表示为:
1.3 控制环路建模
天线控制系统按照经典的电流环、速度环和位置环三环制建模[11],各环路也采用经典的比例积分调节器。
1.4 仿真计算及结果分析

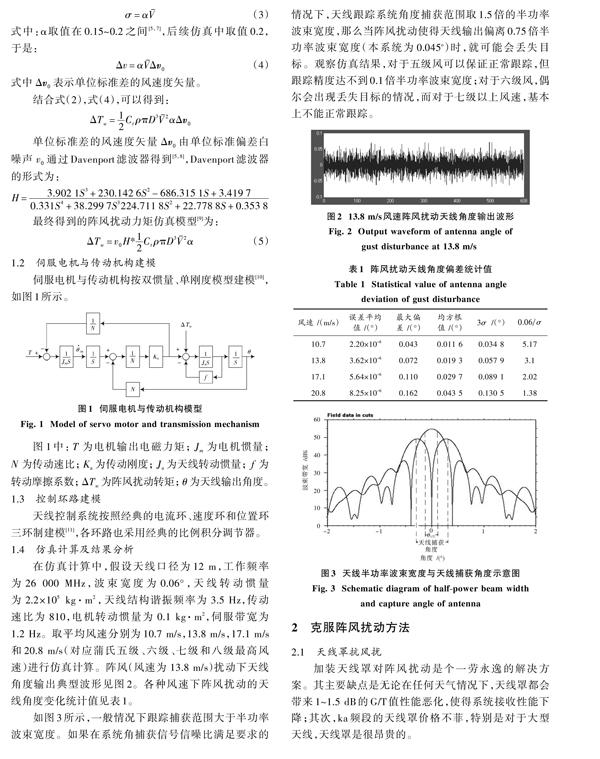
在仿真计算中,假设天线口径为12 m,工作频率为26 000 MHz,波束宽度为0.06°,天线转动惯量为2.2×105 kg·m2,天线结构谐振频率为3.5 Hz,传动速比为810,电机转动惯量为0.1 kg·m2,伺服带宽为1.2 Hz。取平均风速分别为10.7 m/s,13.8 m/s,17.1 m/s和20.8 m/s(对应蒲氏五级、六级、七级和八级最高风速)进行仿真计算。阵风(风速为13.8 m/s)扰动下天线角度输出典型波形见图2。各种风速下阵风扰动的天线角度变化统计值见表1。
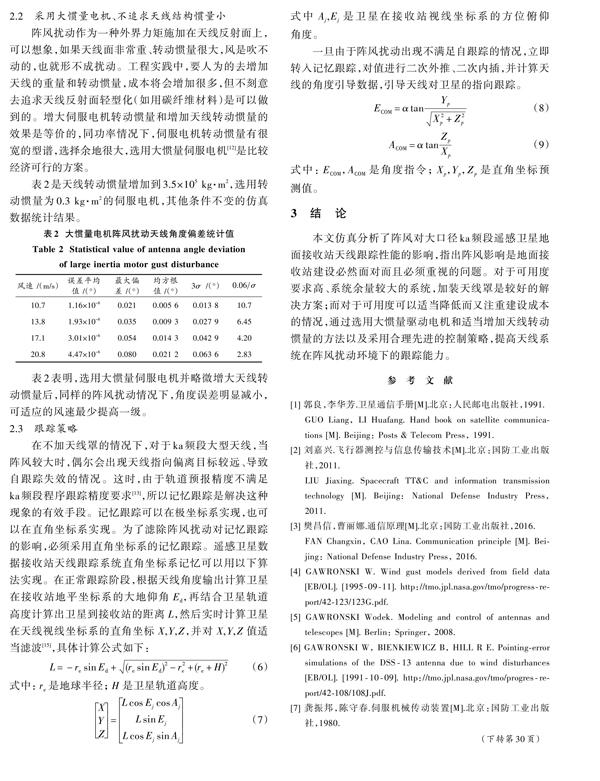
如图3所示,一般情况下跟踪捕获范围大于半功率波束宽度。如果在系统角捕获信号信噪比满足要求的情况下,天线跟踪系统角度捕获范围取1.5倍的半功率波束宽度,那么当阵风扰动使得天线输出偏离0.75倍半功率波束宽度(本系统为0.045o)时,就可能会丢失目标。观察仿真结果,对于五级风可以保证正常跟踪,但跟踪精度达不到0.1倍半功率波束宽度;对于六级风,偶尔会出现丢失目标的情况,而对于七级以上风速,基本上不能正常跟踪。
2 克服阵风扰动方法
2.1 天线罩抗风扰
加装天线罩对阵风扰动是个一劳永逸的解决方案。其主要缺点是无论在任何天气情况下,天线罩都会带来1~1.5 dB的G/T值性能恶化,使得系统接收性能下降;其次,ka频段的天线罩价格不菲,特别是对于大型天线,天线罩是很昂贵的。
2.2 采用大惯量电机、不追求天线结构惯量小
阵风扰动作为一种外界力矩施加在天线反射面上,可以想象,如果天线面非常重、转动惯量很大,风是吹不动的,也就形不成扰动。工程实践中,要人为的去增加天线的重量和转动惯量,成本将会增加很多,但不刻意去追求天线反射面轻型化(如用碳纤维材料)是可以做到的。增大伺服电机转动惯量和增加天线转动惯量的效果是等价的,同功率情况下,伺服电机转动惯量有很宽的型谱,选择余地很大,选用大惯量伺服电机[12]是比较经济可行的方案。
表2表明,选用大惯量伺服电机并略微增大天线转动惯量后,同样的阵风扰动情况下,角度误差明显减小,可适应的风速最少提高一级。
2.3 跟踪策略
在不加天线罩的情况下,对于ka频段大型天线,当阵风较大时,偶尔会出现天线指向偏离目标较远、导致自跟踪失效的情况。这时,由于轨道预报精度不满足ka频段程序跟踪精度要求[13],所以记忆跟踪是解决这种现象的有效手段。记忆跟踪可以在极坐标系实现,也可以在直角坐标系实现。为了滤除阵风扰动对记忆跟踪的影响,必须采用直角坐标系的记忆跟踪。遥感卫星数据接收站天线跟踪系统直角坐标系记忆可以用以下算法实现。在正常跟踪阶段,根据天线角度输出计算卫星在接收站地平坐标系的大地仰角[Ed,]再结合卫星轨道高度计算出卫星到接收站的距离[L,]然后实时计算卫星在天线视线坐标系的直角坐标[X,Y,Z,]并对[X,Y,Z]值适当滤波[15],具体计算公式如下:
3 结 论
本文仿真分析了阵风对大口径ka频段遥感卫星地面接收站天线跟踪性能的影响,指出阵风影响是地面接收站建设必然面对而且必须重视的问题。对于可用度要求高、系统余量较大的系统,加装天线罩是较好的解决方案;而对于可用度可以适当降低而又注重建设成本的情况,通过选用大惯量驱动电机和适当增加天线转动惯量的方法以及采用合理先进的控制策略,提高天线系统在阵风扰动环境下的跟踪能力。
参考文献
[1] 郭良,李华芳.卫星通信手册[M].北京:人民邮电出版社,1991.
GUO Liang, LI Huafang. Hand book on satellite communications [M]. Beijing: Posts & Telecom Press, 1991.
[2] 刘嘉兴.飞行器测控与信息传输技术[M].北京:国防工业出版社,2011.
LIU Jiaxing. Spacecraft TT&C and information transmission technology [M]. Beijing: National Defense Industry Press, 2011.
[3] 樊昌信,曹丽娜.通信原理[M].北京:国防工业出版社,2016.
FAN Changxin, CAO Lina. Communication principle [M]. Beijing: National Defense Industry Press, 2016.
[4] GAWRONSKI W. Wind gust models derived from field data [EB/OL]. [1995?09?11]. http://tmo.jpl.nasa.gov/tmo/progress?report/42?123/123G.pdf.
[5] GAWRONSKI Wodek. Modeling and control of antennas and telescopes [M]. Berlin: Springer, 2008.
[6] GAWRONSKI W, BIENKIEWICZ B, HILL R E. Pointing?error simulations of the DSS?13 antenna due to wind disturbances [EB/OL]. [1991?10?09]. http://tmo.jpl.nasa.gov/tmo/progres?report/42?108/108J.pdf.
[7] 龚振邦,陈守春.伺服机械传动装置[M].北京:国防工业出版社,1980.
GONG Zhenbang, CHEN Shouchun. Servo mechanical transmission device [M]. Beijing: National Defense Industry Press, 1980.
[8] GAWRONSKI W. Three models of wind?gust disturbances for the analysis of antenna pointing accuracy [J]. IEEE antennas & propagation magazine, 2004, 46(1): 50?58.
[9] GAWRONSKI W, BIENKIEWICZ B, HILL R E. Wind?induced dynamics of a deep space network antenna [J]. Journal of sound and vibration, 1994, 178(1): 67?77.
[10] 张子旭.自动控制系统分析与设计[M].西安:陕西科学技术出版社,1997.
ZHANG Zixu. Automatic control system analysis and design [M]. Xian: Shaanxi Science and Technology Press, 1997.
[11] 刘浩,韩晶.Matlab R2014a 完全自学一本通[M].北京:电子工业出版社,2015.
LIU Hao, HAN Jing. Matlab R2014a is a complete self?study [M]. Beijing: Electronic Industry Press, 2015.
[12] 夏福娣.防空导弹制导雷达伺服系统[M].北京:宇航出版社,1996:266?275.
XIA Fudi. Servo system of air defense missile guidance radar [M]. Beijing: Yuhang Publishing House, 1996: 266?275.
[13] 韦栋,赵长印.SGP4/SDP4模型精度分析[J].天文学报,2009,50(3):332?339.
WEI Dong, ZHAO Changyin. Precision analysis of SGP4/SDP4 model [J]. Journal of astronomy, 2009, 50(3): 332?339.
[14] 朱钟淦,叶尚辉.天线结构设计[M].北京:国防工业出版社,1980.
ZHU Zhonggan, YE Shanghui. Antenna structure design [M]. Beijing: National Defense Industry Press, 1980.
