正多面体的转动惯量*
2015-10-29邱为钢
邱为钢
(湖州师范学院理学院 浙江 湖州 313000)
张 萍
(北京师范大学物理学系 北京 100875)
转动惯量的计算是大学物理教学中一类典型题目,文献[1~3]给出了椭圆环、圆锥、园台等物体的转动惯量.这些物体都具有圆柱对称性,那么,具有点群对称性的正多面体转动惯量怎么计算?文献[4]给出了5种正多面体的转动惯量,科学计算软件Mathematica 8.0多面体软件包PolyhedronData中的InertiaTensor指令也给出了各种多面体的转动惯量.正多面体可以由杆(线段)、面、体组成,或者说,质量分别均匀分布在顶点、棱、表面或体内,这种情况下,多面体的转动惯量如何表示?我们给出了杆、三角形和四面体转动惯量的顶点坐标表示[5].由文献[4]的推论可知,正多面体的转动惯量最终表示与坐标轴的取向无关,与各点坐标方式表示无关,只与几何量有关.这样一来,就可以选取一个最容易计算的正多面体的顶点坐标表示,把正多面体剖分为点、线段、三角形和四面体,再组合起来,得到正多面体的转动惯量.
根据杆、三角形和四面体内点坐标的参数表示,由转动惯量的积分定义得到如下结论[5],设杆的两个端点对应的向量为ri= (xi,yi,zi),i=1,2,那么杆对z轴的转动惯量是

设三角形的3个顶点对应的向量为ri=(xi,yi,zi),i=1,2,3,则三角形板对z轴的转动惯量是
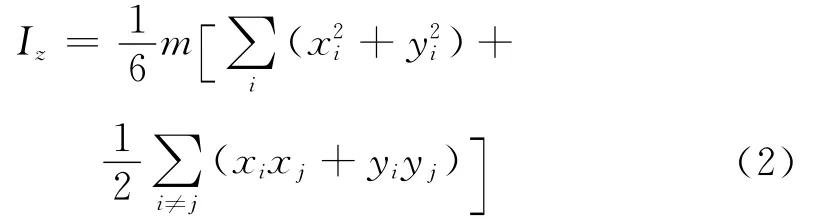
设四面体的4个顶点对应的向量为:ri= (xi,yi,zi),i=1,2,3,4,则四面体对z轴的转动惯量是
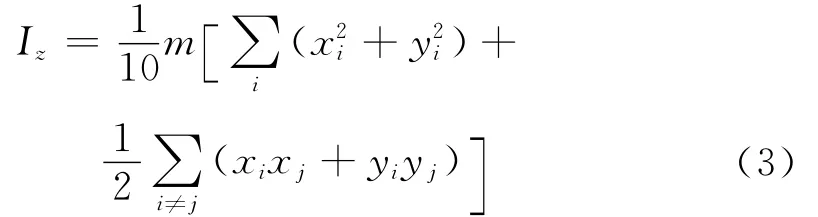
以上物体,对x,y轴的转动惯量,由指标x,y,z轮换得到.

表1 正多面体的顶点坐标
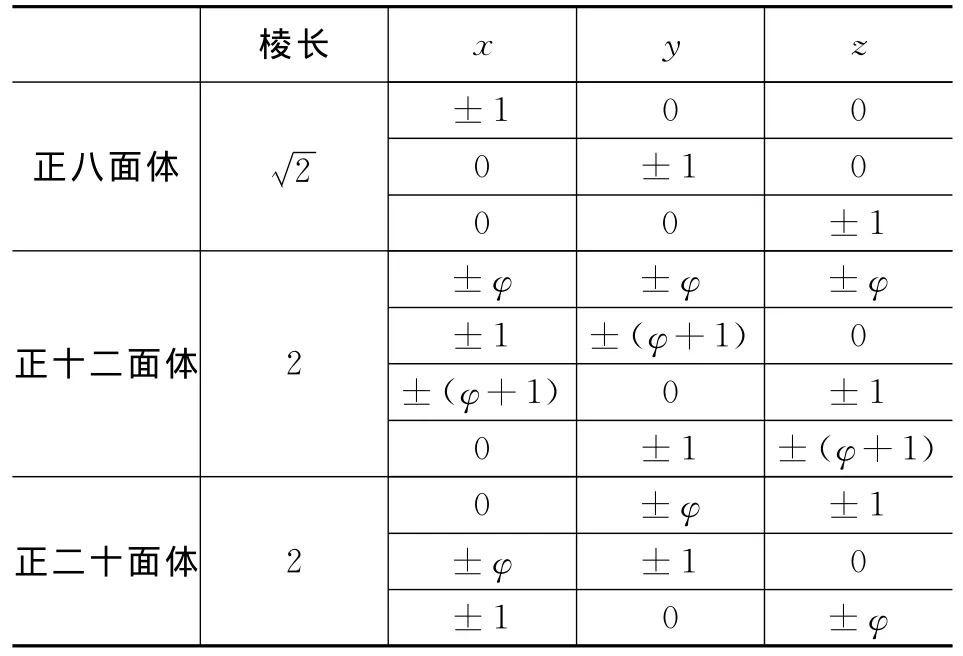
续表
由转动惯量的坐标表示(1 2 3 式以及表1给出的多面体顶点坐标,对多面体进行合理的剖分.计算得到质量分别均匀分布在多面体各个顶点,各条棱、各个面和体内的转动惯量,如表2所示.
表2最后一列的数据与Mathematica多面体软件包PolyhedronData中InertiaTensor指令和文献[4]给出的转动惯量完全一致.
与文献[4]所用的几何和积分方法相比,我们所用的坐标表示方法更加简明,而且容易编程计算.
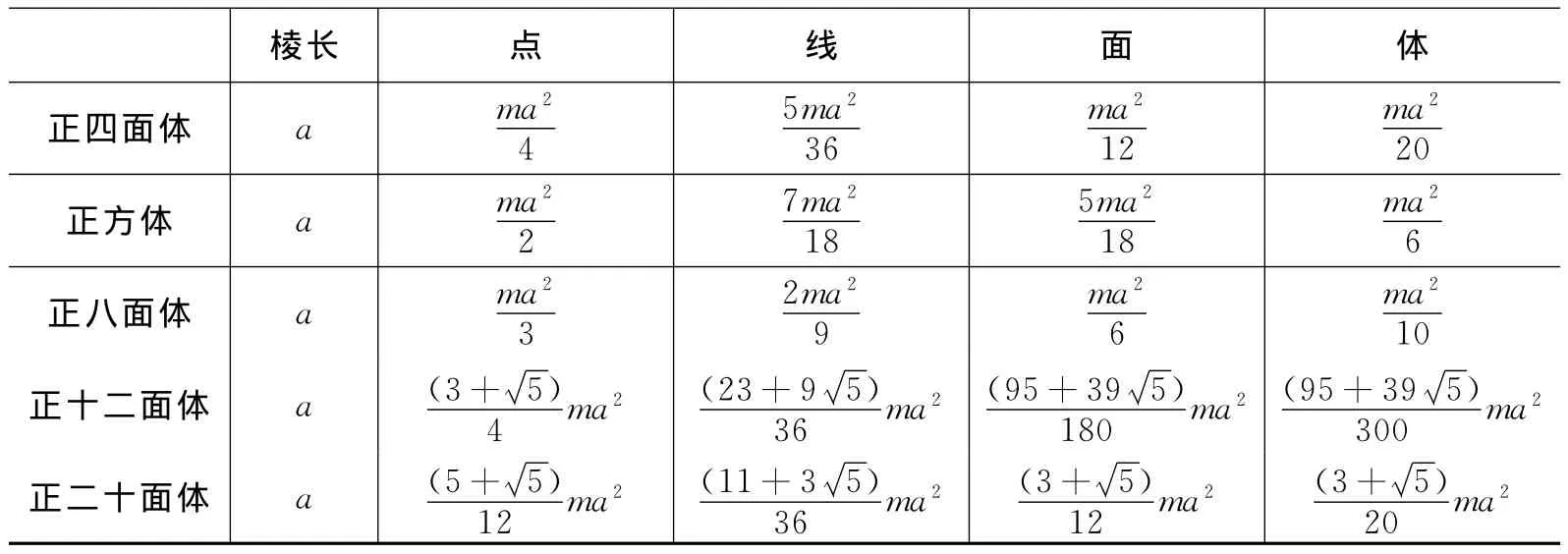
表2 正多面体的转动惯量
对于Mathematica多面体软件包Polyhedron-Data中其他多面体,有兴趣和时间的读者不妨用我们的方法算一算,这儿就不详细探究了.顺便说一下,Mathematica计算转动惯量用的是直接积分方法,借助了PolyhedronData中的RegionFunction选项和Boole函数.当然,实际物体不大可能呈现正多面体形状,这些物体的转动惯量张量的计算,可以沿用文献[5]的思路,三角形或四面体剖分,利用三角形或四面体转动惯量的坐标表示,直接求和计算,这大大简化了手工计算的难度.
1 赵新闻,周欣然,杨兵初.椭圆环刚体的转动惯量.大学物理,2008,27(6):13~14
2 楼智美.巧算常见均质旋转体对母线的转动惯量.大学物理,2003,22(11):26~27
3 楼智美.均质旋转面绕旋转轴转动的转动惯量.大学物理,2009,28(12):22~24
4 刘甲刚,严云玲.均质正多面体主惯量轴和主矩.陕西工学院学报,1996,12(1):78~83
5 邱为钢.转动惯量的坐标表示.物理通报,2014(2):16~18
